 基于PSIM的UC3825芯片建模仿真(2)
基于PSIM的UC3825芯片建模仿真(2)
大家好,接著上面講3825其它幾個模塊的建模,主要詳細講述反饋調節以及保護模塊,并建立完整芯片的建模。
首先是反饋調節部分,我們還是需要結合芯片內部結構模塊圖做分解。
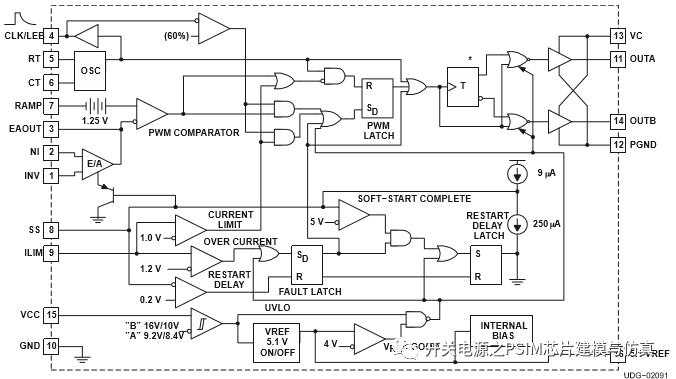
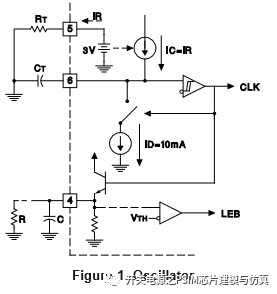
反饋調節部分,1腳是反相輸入,2腳是正向輸入,3腳是運放輸出,通常3腳和1腳連在一起,做反饋補償,3腳輸出和7腳上面疊加1.25電壓進行比較,進而調節占空比。其中運放通過一個三極管連接到8腳,當8腳電壓比較低,也就是緩起的時候,可以限制運放的環路輸出,達到軟起的目的。8腳是如何緩起以及控制的了,我們通過仿真建模詳細論述。
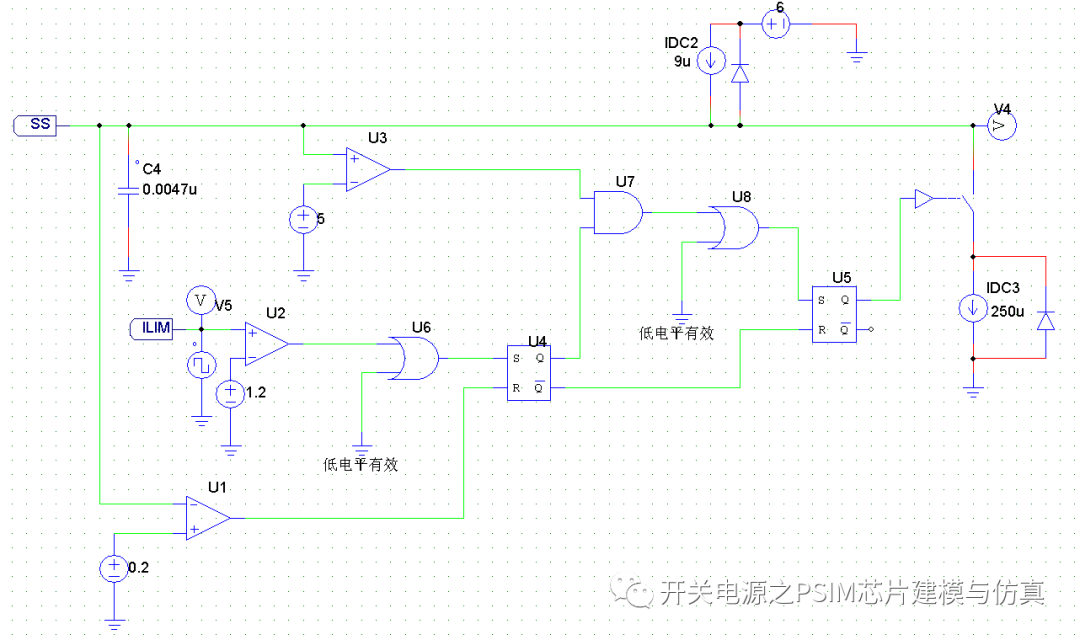
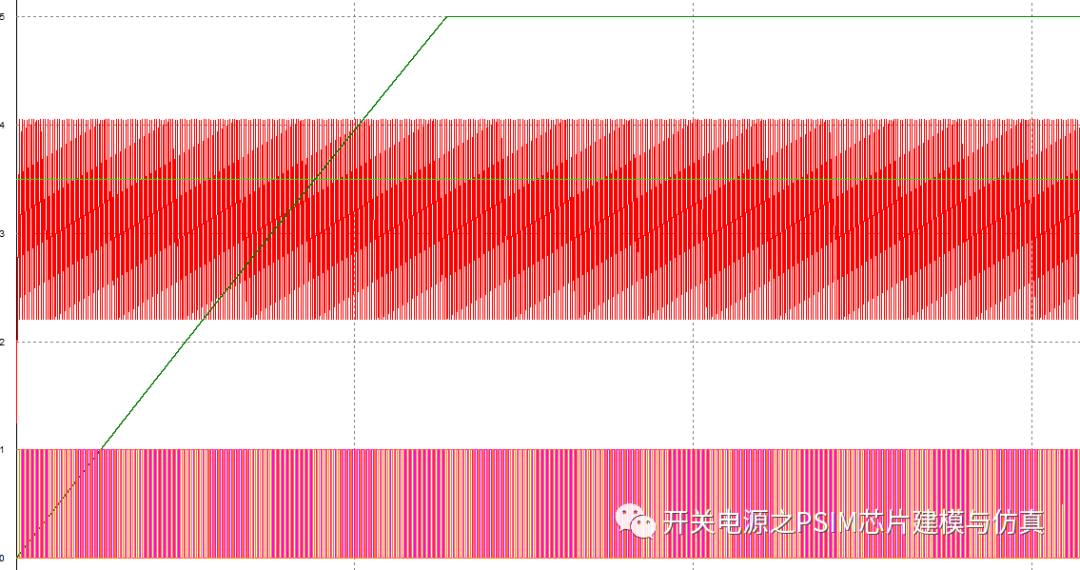
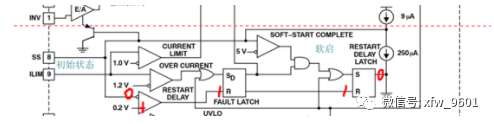
8腳連接電容到地,一個9uA的恒流源對電容充電,電容的大小決定了緩起的時間長短,這里做了一個5V的電壓限制,緩起最高到5V,當電壓緩起到5V的時候,U3比較器輸出為高,此時假設電路沒有過流故障,也就是ILIM腳電壓低于1.2V,U4的輸出Q為低電平,Q非為高電平,U5的輸出Q為低電平,此時SS腳電壓保持在5V,緩起完成,進入正常工作狀態;當ILIM高于1.2V,也就是出現過流故障,此時U2輸出為高,RS觸發器U4輸出Q為高,RS觸發器U5輸出Q為高,SS腳電容則以恒流源250uA進行放電,當放電到0.2V,RS觸發器U4復位,Q非輸出為高,RS觸發器U5也復位,Q輸出為低,SS腳電容則又以9uA電流進行充電,從復上述步驟;當在緩起過程中出現故障,則SS腳充電不受影響,直到5V,然后放電到0.2V觸發器復位,重新判斷狀態,也就是故障會鎖存到下一個緩起周期。
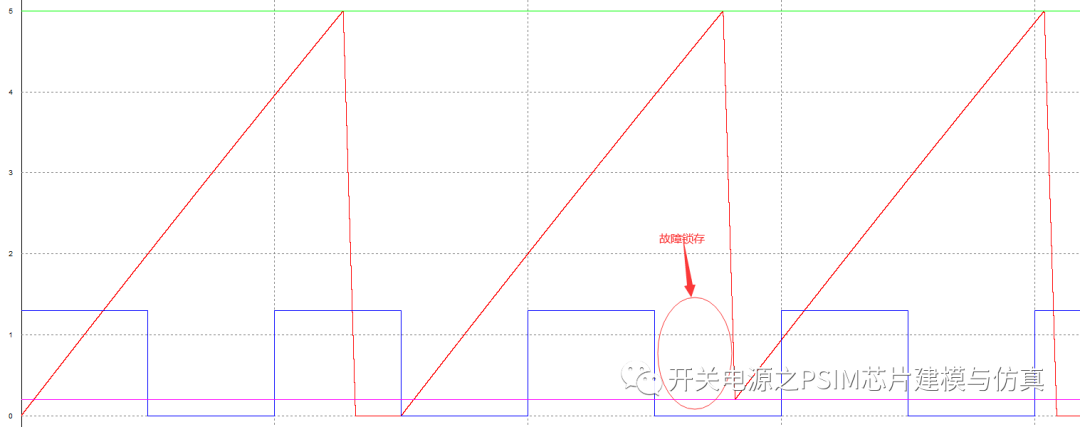
紅色部分即為SS腳電壓,藍色部分為ILIM腳電壓,當ILIM腳變高的時候,SS腳電壓會繼續充電直到為5V,觸發器置位,然后放電復位,進行下一個緩起狀態。
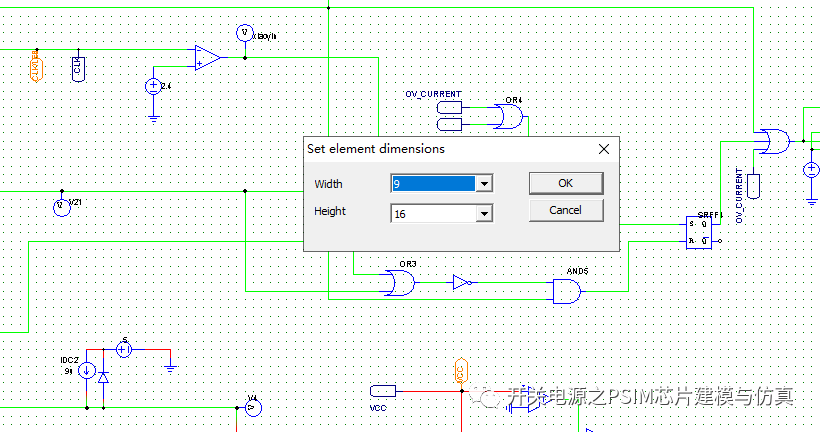
其它芯片內部功能不做過多描述,建模按內部模塊提供的邏輯即可。
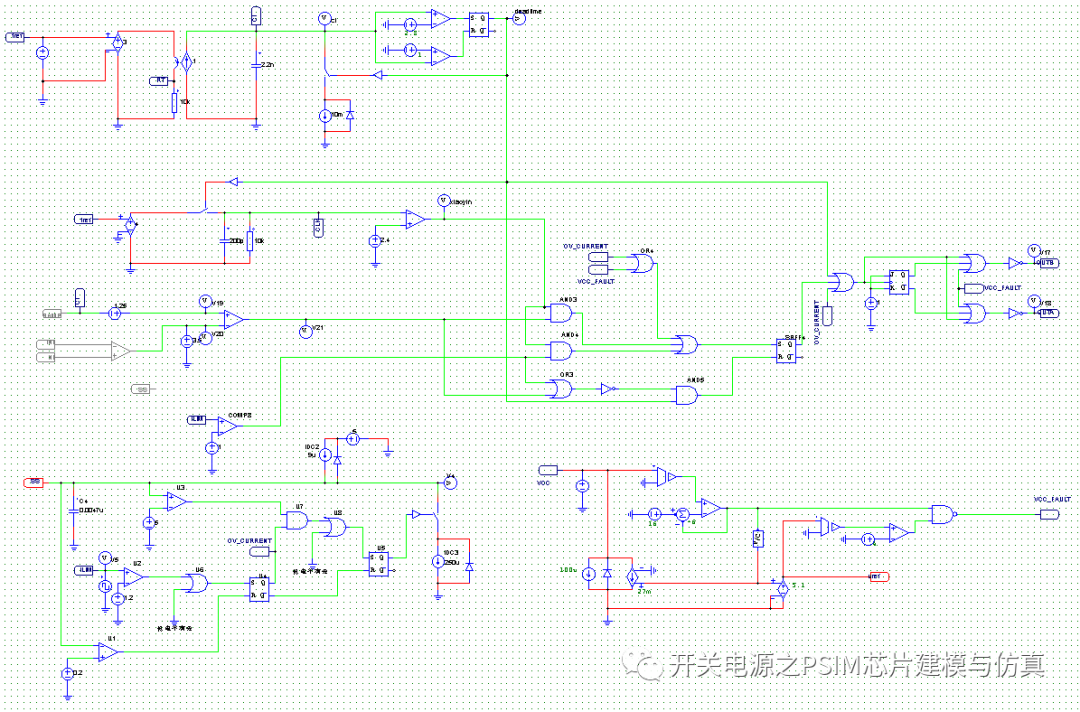
為了有波形輸出,一些腳位進行了電壓的置高或置低,對于電壓模式,可以用INI腳做反饋電壓,NI腳做基準電壓,調節環路輸出,從而控制占空比。
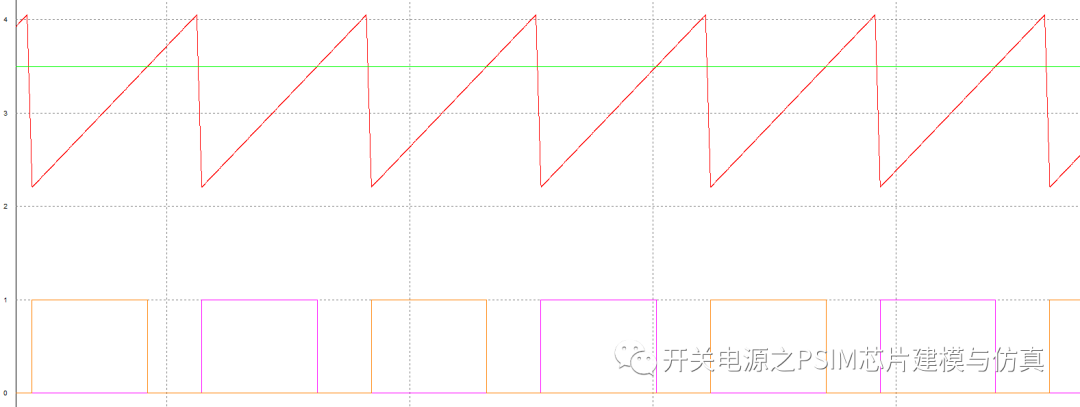
環路輸出和三角波的切割,產生占空比。(未完待續,下期介紹如何進行芯片設計)
-
芯片
+關注
關注
456文章
51192瀏覽量
427327 -
運放
+關注
關注
47文章
1170瀏覽量
53272 -
仿真
+關注
關注
50文章
4124瀏覽量
134005 -
PSIM
+關注
關注
24文章
41瀏覽量
26710 -
UC3825
+關注
關注
2文章
5瀏覽量
16213
發布評論請先 登錄
相關推薦
UC3825斜坡輸入引腳外接電路同時接在了限流采樣電阻上和時鐘震蕩電容上,是想實現什么目的?
UC1823A,UC1823B/UC1825A,UC1825
UC3823A,UC3823B/UC3825A,UC3825
PWM控制器UC3825在1MHz/100W功率信號源中的應

Simulink建模仿真實例快速入門
UC3825 高速 PWM 控制器

UC3825B 高速 PWM 控制器

基于PSIM的UC3825芯片建模仿真(1)
UC3825A芯片建模過程





 工商網監
工商網監
評論