 【技術分享】電子指南針項目分享 含設備端+應用端講解
【技術分享】電子指南針項目分享 含設備端+應用端講解
電子指南針是現代的一種重要導航工具,大到飛機船舶的導航,小到個人手機導航,電子指南針可以說和咱們生活息息相關,密不可分。為什么電子指南針能指示方向?本 Demo 將為你呈現,其中蘊含了人類智慧及大自然的奧妙。
本項目分為數據采集端(設備端)和效果展示端(應用端):
數據采集端(設備端):
1、指南針數據采集端:使用的是 Geek_Lite_Board 開發板,其內置了三軸磁力計 AK8963,通過解析磁力計數據獲得指南針數據信息,操作系統版本為 OpenAtom OpenHarmony 3.0(以下簡稱“OpenHarmony”);
2、指南針效果展示端:使用的是潤和 RK3568 開發板,操作系統版本為 OpenHarmony 3.1 release。
效果展示端則體現了 OpenHarmony JS UI、Canvas 組件和 NAPI 的能力:
效果展示端(應用端)
1、Canvas 組件是一個畫布組件,獲取到畫布對象后,可以自定義繪制圖形,比如圓形,線條等,本項目中應用端的指南針界面是基于 Canvas 組件開發;
2、NAPl (NativeAPI)是 OpenHarmony 標準系統的一種 JS API 實現機制,通過 NAPI 可以實現 JS 與 C/C++ 代碼互相訪問。本項目應用端通過 NAPI 來接收設備端發出的檢測信息。
當設備應用啟動之后,運行效果如下動圖所示:
一、基本原理
地球是一個大磁體,地球的兩個極分別在接近地理南極和地理北極的地方,一般情況下地球的磁場強度在 0.5 高斯左右(高斯是磁場強度單位)。
Geek_Lite_Board 開發板帶有 AK8963 三軸磁力計。三軸磁力計能夠測出相互垂直的三個方向的磁力大小。通常我們把傳感器平放,即讓重力方向與傳感器垂直,假設重力方向為 z 軸,其余兩軸為 x 軸和 y 軸。在只受地球磁場的環境下(忽略其余弱小干擾),x 軸 y 軸檢測到的磁力數據的矢量和就等于接收到的地球磁場。
我們利用 x 軸與 y 軸的比值,就能確定目前朝向正北邊差多少角度。例如現測到 x 軸數據接近 0.5 高斯,y 軸數據接近 0,就認為目前的 x 軸方向就是正北方。那 x 軸方向是哪個方向?關于 x 軸方向,生產傳感器芯片的廠商會預定義好傳感器的 x 軸、y 軸及 z 軸方向(通常垂直芯片表面的為 z 軸)。
數據流程
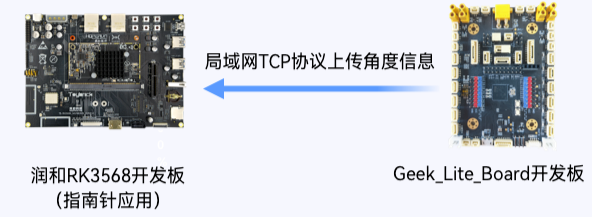
智能指南針整體方案如上圖所示,主要由 Geek_Lite_Board 開發板和潤和 RK3568 開發板構成,它們采用局域網(路由器)TCP 協議的通信方式。
1. Geek_Lite_Board 開發板通過板載的磁力計獲取磁場數據,磁場數據經過處理后得到角度數據;
2. 角度信息通過 ESP8266 無線 Wi-Fi 模塊發送到指南針應用端;
3. 指南針應用端通過 NAPI 接口獲取底層網絡數據,并在頁面展示。
二、功能實現
指南針數據的獲取
Geek_Lite_Board 開發板通過 IIC 接口與 AK8963 三軸磁力計通信,讀取三軸方向的磁場數據,通過磁場數據計算后得到指南針的方位數據。
● AK8963介紹
AK8963是采用高靈敏度霍爾傳感器技術,內部集成了檢測x、y、z軸的磁傳感器、傳感器驅動電路、信號放大器和用于處理每個傳感器信號的算術電路。同時,還配備了自測功能。其緊湊的封裝,還可適用于配備gps的手機的地圖導航,實現行人導航等功能。
● AK8963測量數據的讀取
AK8963 和單片機通過 IIC 接口連接,單片機操作 IIC 總線按照數據手冊的操作時序操作即可讀取 AK8963 的數據,AK8963 獲取測量數據的函數實現如下:
uint8_t Mpu_Read_Bytes(uint8_t const regAddr, uint8_t *pData, uint8_t len){ int i = 0; MPU_ENABLE; while (SPI_I2S_GetFlagStatus(SPI5, SPI_I2S_FLAG_TXE) == RESET); SPI_I2S_SendData(SPI5, regAddr | 0x80); while (SPI_I2S_GetFlagStatus(SPI5, SPI_I2S_FLAG_RXNE) == RESET); SPI_I2S_ReceiveData(SPI5); for(i=0; i while(SPI_I2S_GetFlagStatus(SPI5, SPI_I2S_FLAG_TXE) == RESET); SPI_I2S_SendData(SPI5, 0x00); while(SPI_I2S_GetFlagStatus(SPI5, SPI_I2S_FLAG_RXNE) == RESET); pData[i] = SPI_I2S_ReceiveData(SPI5); } MPU_DISABLE; return 0;}
● AK8963數據處理得到磁力數據
調用 Mpu_Read_Bytes 函數獲取測量數據,其中 MPU_BUFF[15] 到 MPU_BUFF[20] 這六個字節的數據就是磁力計的數據。此時的磁力計數據還不穩定不能直接用來計算指南針的角度,還需要進行濾波處理,此處用到的濾波算法是滑動均值濾波。數據處理代碼如下:
Mpu_Read_Bytes(MPUREG_ACCEL_XOUT_H, MPU_BUFF, 28);if(MPU_BUFF[14] == 1) { // 從 MPU_BUFF[]中提取磁力數據 Mpu_Data.mag_x = (MPU_BUFF[16] << 8) | MPU_BUFF[15]; ? ?Mpu_Data.mag_y = (MPU_BUFF[18] << 8) | MPU_BUFF[17]; ? ?Mpu_Data.mag_z = (MPU_BUFF[20] << 8) | MPU_BUFF[19]; ?// 對x軸方向磁力計數據進行濾波,取滑動平均 ?for(i=0;i<14;i++) { ? ?mag_x_buff[i] = mag_x_buff[i+1] ? //滑動 ?} ? ? ?if(Mpu_Data.mag_x > -500 && Mpu_Data.mag_x < 500) { ? ? ? ?mag_x_buff[14] = Mpu_Data.mag_x; ? ?} ? ?//取平均值 ? ?Mpu_Calc.mag_x = ( mag_x_buff[0] + mag_x_buff[1] + mag_x_buff[2] \ ? ?+ mag_x_buff[3] + mag_x_buff[4] + mag_x_buff[5] + mag_x_buff[6] \ ? ?+ mag_x_buff[7] + mag_x_buff[8] + mag_x_buff[9] + mag_x_buff[10] \ ? ?+ mag_x_buff[11] + mag_x_buff[12] + mag_x_buff[13] ? ?+ mag_x_buff[14] )/15.0f; ? ? // 對y軸方向磁力計數據進行濾波,取滑動平均 ? ?for(i=0;i<14;i++){ ? ? ?mag_y_buff[i] = mag_y_buff[i+1]; ?//滑動 ? ? ? ? ? ?} ? ? ? ? ? ?if(Mpu_Data.mag_y > -500 && Mpu_Data.mag_y < 500){ ? ? mag_y_buff[14] = Mpu_Data.mag_y; ? ?} ? ?//取平均值 ? ?Mpu_Calc.mag_y = ( mag_y_buff[0] + mag_y_buff[1] + mag_y_buff[2] \ ? ?+ mag_y_buff[3] + mag_y_buff[4] + mag_y_buff[5] + mag_y_buff[6] \ ? ?+ mag_y_buff[7] + mag_y_buff[8] + mag_y_buff[9] + mag_y_buff[10] \ ? ?+ mag_y_buff[11] + mag_y_buff[12] + mag_y_buff[13] ? ?+ mag_y_buff[14] )/15.0f; ? ?// 對磁力計z軸方向進行濾波 ? ?mag_z_buff[0] = mag_z_buff[1]; ? ?mag_z_buff[1] = Mpu_Data.mag_z; ? ?Mpu_Calc.mag_z = (int16_t)((mag_z_buff[0] + mag_z_buff[1])/ 2.0f);}
● 角度數據計算
磁力計數據通過濾波后得到 x y z 三個軸方向的磁力分量,計算出 x 和 y軸的 tan 值,再通過反正切計算出角度,角度經過滑動平均得到最終需要顯示出來的指南針角度值,計算過程見如下代碼。
angle_buff[0] = angle_buff[1]; angle_buff[1] = angle_buff[2]; angle_buff[2] = ((uint16_t)(atan2((Mpu_Calc.mag_y - Mag_y_OffSet),\ (Mpu_Calc.mag_x - Mag_x_OffSet)) *180 / PI + 180 )); angle = ((uint16_t)((angle_buff[0] + angle_buff[1] + angle_buff[2]) \ / 3.0 + 0.5));
指南針數據的傳輸
Geek_Lite_Board 開發板外掛 ESP8266 Wi-Fi 模組通過局域網 TCP 通信的方式將角度數據傳輸給潤和 RK3568 開發板,潤和 RK3568 開發板通過 NAPI 接口獲取底層網絡數據,從網絡數據中解析出角度數據,并在顯示屏上顯示出來。
角度數據的顯示
角度數據的顯示由潤和 RK3568 開發板實現,主要分為指南針顯示頁面的繪制和 NAPI 從局域網上獲取角度數據并展示到界面上。
指南針顯示頁面
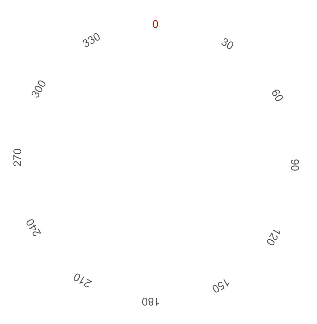
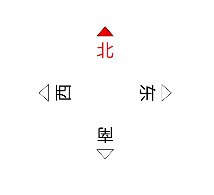
指南針的顯示頁面主要通過 Canvas 組件畫圖完成,包含方位角度、指南針針盤和指示線,顯示整體效果如下圖所示。
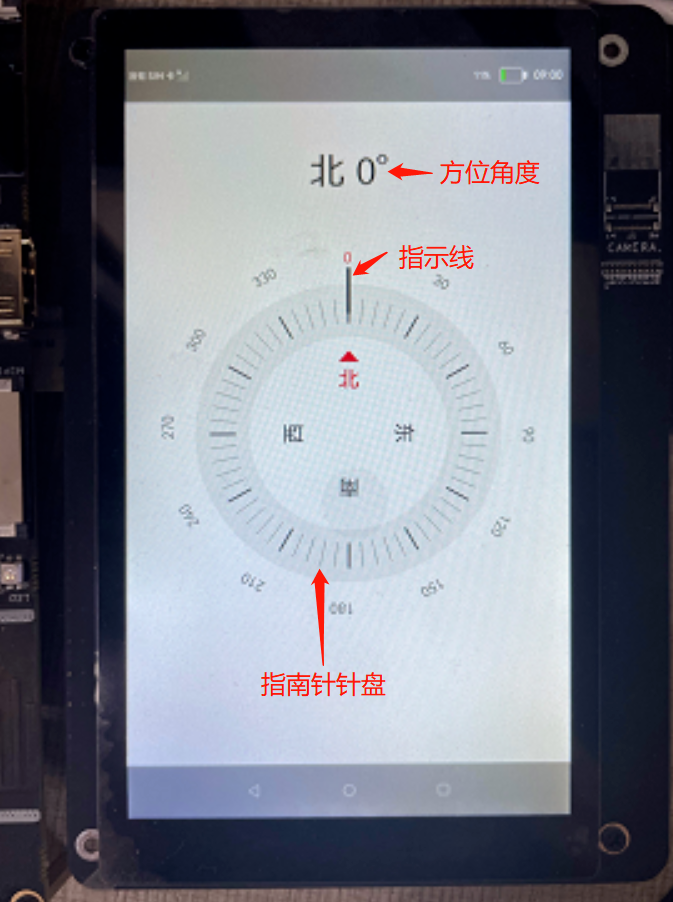
指南針針盤由一個 Canvas 組件構成,包含了三個部分,分別為刻度盤、角度數字、方位文字,他們的效果圖分別如下:
● 刻度盤
● 角度數字
● 方位文字
Canvas組件相關知識可以參考:https://gitee.com/openharmony/do ... ts-canvas-canvas.md
NAPI
NAPI(Native API)是 OpenHarmony 標準系統的一種 JS API 實現機制,適合封裝 IO、CPU 密集型、OS 底層等能力并對外暴露 JS 接口,通過 NAPI 可以實現 JS 與 C/C++ 代碼互相訪問。潤和 RK3568 應用端通過 NAPI 來接收設備端發出的檢測信息。
底層 NAPI 模塊封裝
● 本應用封裝的模塊名為 tcpserverapi,先下載源碼,源碼路徑為:
https://gitee.com/openharmony-sig/knowledge_demo_temp/tree/master/dev/team_x/napi_tcpservermodule/tcpservermodule
● 下載完成后放到 OpenHarmony 3.1 Release 版本源碼根目錄,并配置編譯腳本;第一次編譯完成需要燒寫整個鏡像,請參考[開發板上新 | RK3568 開發板上絲滑體驗 OpenHarmony 標準系統]:
https://gitee.com/openharmony-sig/knowledge_demo_smart_home/tree/master/dev/docs/rk3568_quick_start
● 后面修改模塊源碼,只需將庫send到板子里面。命令如下:
先掛載,再sendhdc_std shell mount -o remount,rw /hdc_std file send libtcpserverapi.z.so system/lib/module/libtcpserverapi.z.so應用端導入NAPI模塊import tcpserverapi from '@ohos.tcpserverapi'應用端NAPI接口調用//調用initServer接口 初始化 TCP 服務器tcpserverapi.initServer()//調用recvMsg 獲取并解析SMT32板子發送過來的角度tcpserverapi.recvMsg().then((result) => { var resultAngle = result.angle; })
更多 NAPI 相關知識請參考《標準設備應用開發 Native Api》視頻課程。
-
電子指南針
+關注
關注
0文章
5瀏覽量
6131
發布評論請先 登錄
相關推薦
端到端自動駕駛技術研究與分析
爆火的端到端如何加速智駕落地?

充電端協議和受電端協議有什么區別及協議芯片的應用
放大器單端雙端輸出的區別
單端功放和雙端的區別是什么
芯盾時代設備指紋技術如何助力移動端安全
恩智浦完整的Matter端到端解決方案
醫療機器人的“指南針”:MT6701磁編碼IC實現精確導航
saas模式的一套智慧工地云平臺源碼,支持多端展示:PC端、大屏端、手機端、平板端






 工商網監
工商網監
評論