 電磁導航、磁帶導航、視覺導航、激光導航一文看AGV行業發展
電磁導航、磁帶導航、視覺導航、激光導航一文看AGV行業發展
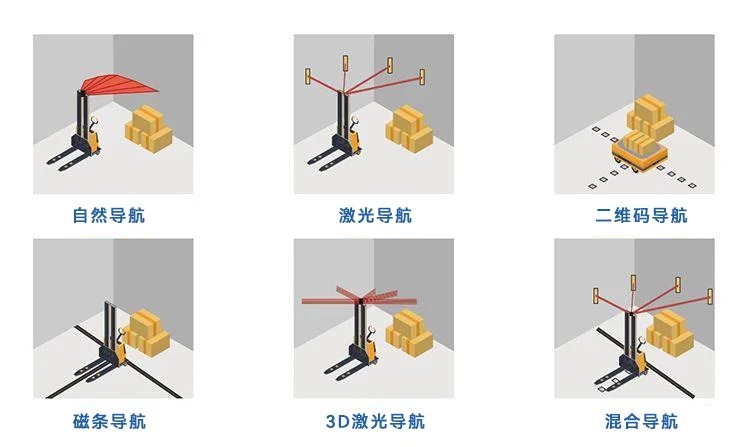
1、電磁導航
電磁導航原理:電磁導航是較為傳統的導航方式之一,目前仍被許多系統采用,它是在AGV的行駛路徑上埋設金屬線,并在金屬線上加載導引頻率,通過對導引頻率的識別來實現AGV的導航。
電磁導航優點:導引線隱蔽,不易污染和破損,導引原理簡單而可靠,便于控制通訊,對聲光無干擾,投資成本比激光導航低很多;
電磁導航缺點:改變或擴充路徑較麻煩,導引線鋪設相對困難。
2、磁帶導航
磁帶導航原理:磁帶導航技術與電磁導航相近,不同之處在于采用了在路面上貼磁帶替代在地面下埋設金屬線,通過磁帶感應信號實現導引。
磁帶導航優點:AGV定位精確,磁帶導航靈活性比較好,改變或擴充路徑較容易,磁帶鋪設也相對簡單,導引原理簡單而可靠,便于控制通訊,對聲光無干擾,投資成本比激光導航低很多;
磁帶導航缺點:磁帶需要維護,要及時更換損壞嚴重磁帶,不過磁帶更換簡單方便,成本較低。
3、視覺導航
視覺導航原理:視覺導航是在AGV的行駛路徑上涂刷與地面顏色反差大的油漆或粘貼顏色反差大的色帶,在AGV上安裝有攝圖傳感器將不斷拍攝的圖片與存儲圖片進行對比,偏移量信號輸出給驅動控制系統,控制系統經過計算糾正AGV的行走方向,實現AGV的導航。
視覺導航優點:AGV定位精確,視覺導航靈活性比較好,改變或擴充路徑也較容易,路徑鋪設也相對簡單,導引原理同樣簡單而可靠,便于控制通訊,對聲光無干擾,投資成本比激光導航同樣低很多,但比磁帶導航稍貴;
視覺導航缺點:路徑同樣需要維護,不過維護也較簡單方便,成本也較低。
4、激光導航
激光導航原理:激光導航是在AGV行駛路徑的周圍安裝位置精確的反射板,AGV通過發射激光束,同時采集由反射板反射的激光束,來確定其當前的位置和方向。
AGV的初始位置計算——AGV小車停止不動;激光掃描器至少可測得4條光束,即至少“看到”4塊反射板;已知所有反射板的精確位置(X,Y);
AGV的連續位置計算——根據運動模型估算小車的當前位置,根據估算的新位置關聯反射板,根據關聯的反射板修正自身位置,據此修正AGV下一步動作。
激光導航優點:AGV定位精確,地面無需其它定位設施;行駛路徑可靈活改變;
激光導航缺點:由于控制復雜及激光技術昂貴投資成本較高,反射片與AGV激光傳感器之間不能有障礙物,不適合空中有物流影響的場合。
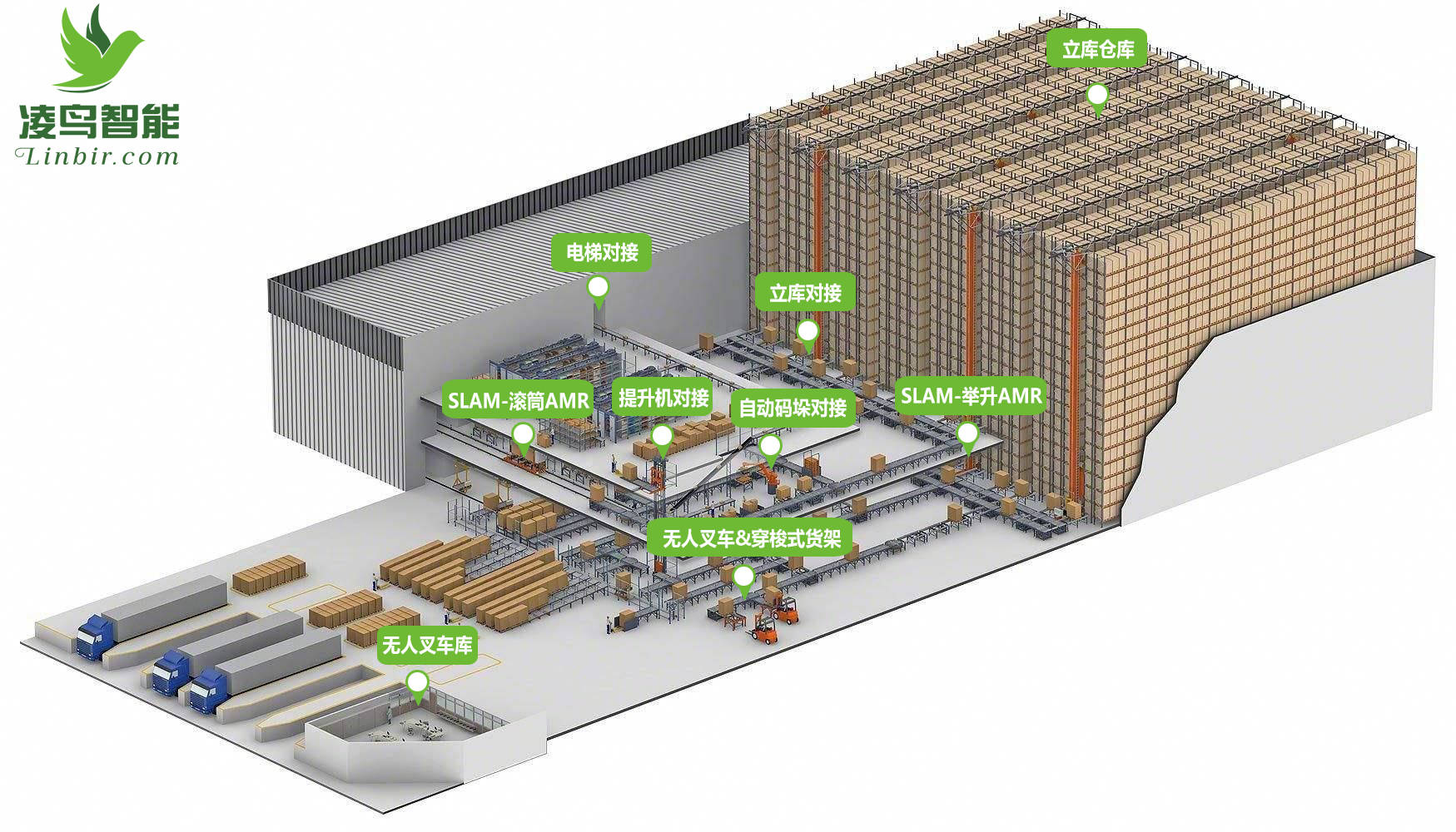
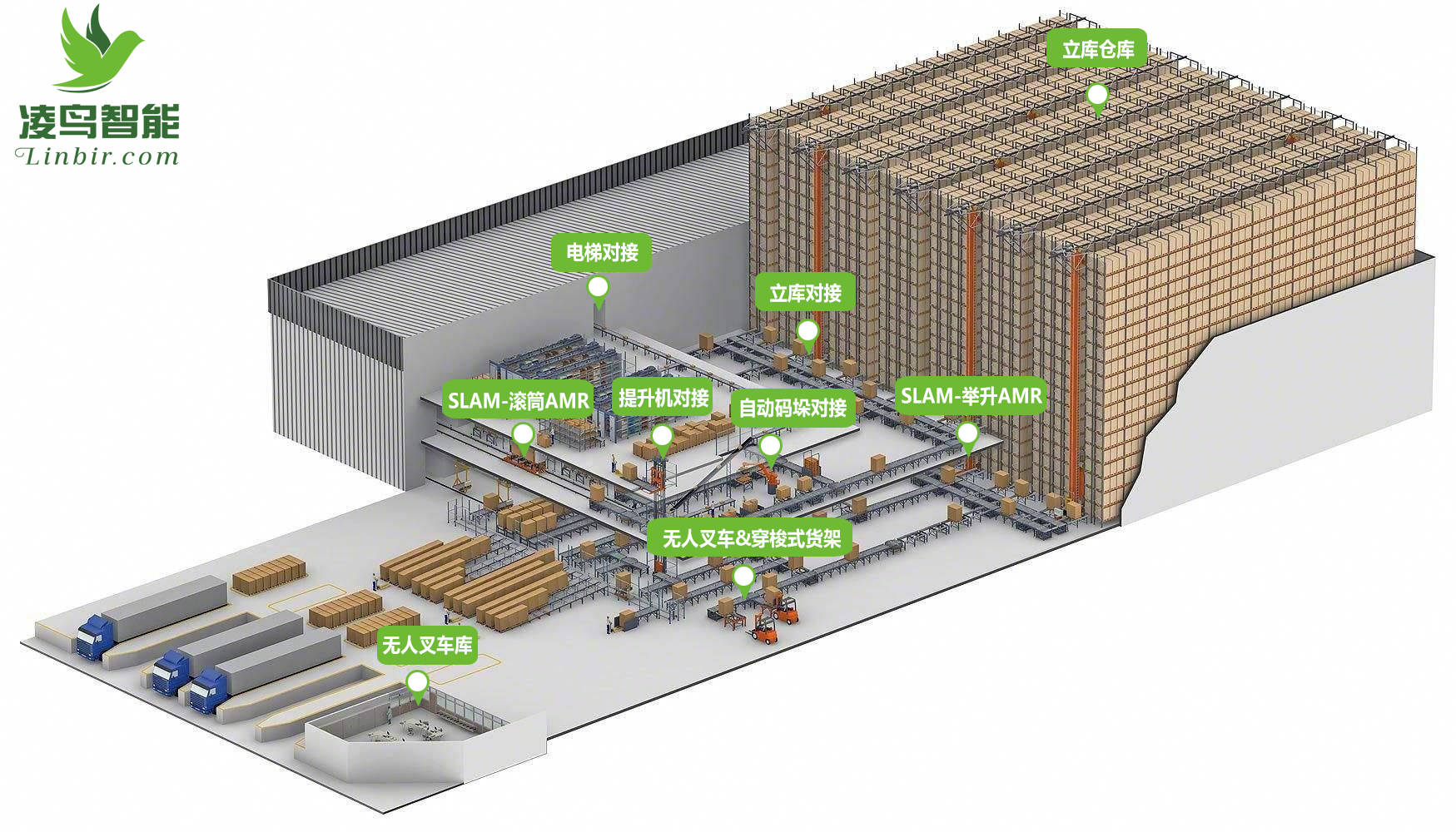
深圳市不止技術有限公司DTOF激光雷達廣泛應用于無人駕駛、商用服務機器人、物流AGV車、大屏互動、安防、測繪、港口、工業自動化等八大產業生態圈。公司聚焦高性能、低成本二維及三維激光雷達技術的研究與開發,旨在為客戶提供最具性價比的激光雷達產品,致力于以穩定、可靠的激光雷達環境感知技術賦能產業升級,立志成為全球領先的激光雷達及移動機器人底盤,AGV整體解決方案提供商。
-
機器視覺
+關注
關注
162文章
4405瀏覽量
120732 -
AGV
+關注
關注
27文章
1331瀏覽量
41257 -
激光雷達
+關注
關注
968文章
4025瀏覽量
190407
發布評論請先 登錄
相關推薦

基于視覺語言模型的導航框架VLMnav
導航分析儀的技術原理和應用場景
AGV激光導航定位技術與構建地圖

智能呼叫、激光導航、自動避障,為什么AGV機器人被需要?

agv叉車激光導航和二維碼導航有什么區別?適用什么場景?選哪種比較好?
一體化導航技術的應用和優點
革新出行體驗:音頻定位導航系統引領智能導航新時代
隧道定位導航的解決方案
Agv無人叉車常見的5種導航方式大盤點!優缺點分析 哪種更適合你?
視覺系統輔助引導在激光導航AGV中應用
AGV小車上的慣性導航模塊運用——SGPM02

激光,磁性,視覺?什么是AGV最好的導航系統?





 工商網監
工商網監
評論