 實現ARM+ROS(機器人操作系統)之運行ROS!
實現ARM+ROS(機器人操作系統)之運行ROS!
如何低成本搭建ARM+ROS的硬件載體?上文展示ROS部署前的籌備工作及步驟分解,本文將為大家演示ROS的移植及測試方法。
1. 準備工作
經過前面的環境搭建,HDG2L-IoT評估套件已經能穩定地運行Ubuntu+docker環境,當前需要下載運行ROS鏡像即可。
本文參考ROS官方文檔《Getting started with ROS and Docker》,結合我司的HDG2L-IoT評估套件實現ROS方案完全搭建流程,參考網址如下所示。

2. 選擇ROS鏡像
目前docker官網提供了搭建好的ROS鏡像(支持arm64架構),網址為:

如下所示。
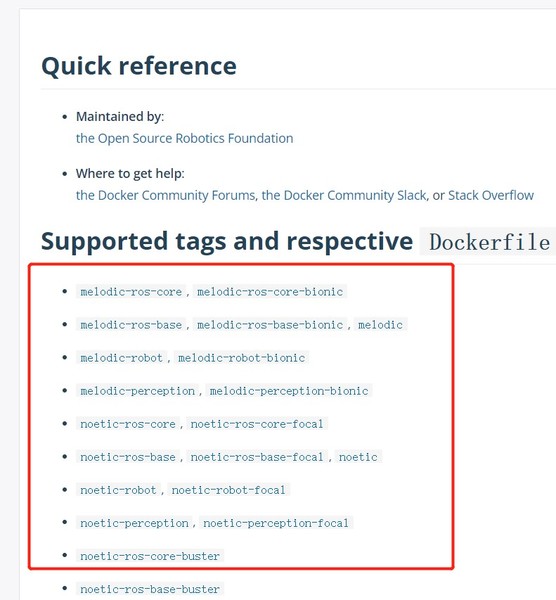
下載命令如下所示,填入上圖的字符串。

3. 下載ROS鏡像
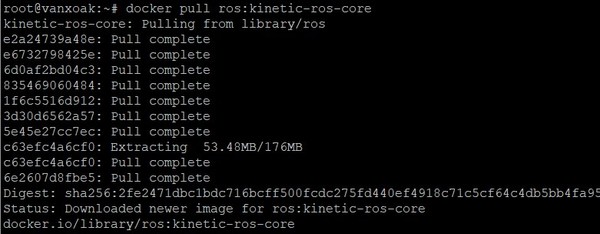
根據項目需求選擇合適的ROS鏡像,本例以kinetic-ros-core為例,下載命令如下所示。

下載完成如下圖所示:
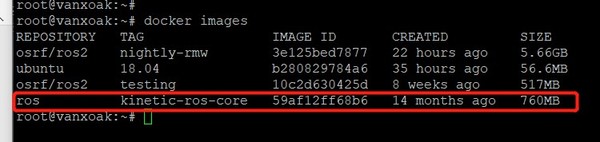
查看鏡像的命令:

4. 運行ROS容器
使用下載下來的ROS鏡像來啟動容器,命令如下所示。

以終端模式進入ROS容器。
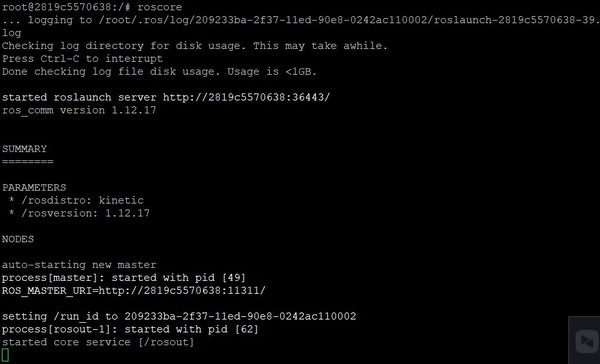
5. 啟動ROS應用
進入后運行roscore來啟動運行ros節點必要的ROS Master和ROS parameter,運行情況如下所示。
至此,我們通過三篇文章從硬件與底層、環境搭建、ROS運行等方面為大家介紹了一個全新的ARM+ROS的軟硬件實現方案。文章中若有不明之處或需要技術問題交流請隨時聯系萬象奧科官方。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
ARM開發
+關注
關注
0文章
36瀏覽量
9619
發布評論請先 登錄
相關推薦
ROSCon China 2024 | RDK第一本教材來了!地瓜機器人與古月居發布新書《ROS 2智能機器人開發實踐》
12月7日-8日,為期兩天的ROSCon China 2024在上海圓滿落幕,來自全球的ROS專家學者、開發者、企業代表齊聚一堂,共享機器人前沿技術成果。地瓜機器人攜手眾多RDK生態產品亮相,并聯手古月居共同推出首本基于RDK

ROSCon China 2024 | RDK第一本教材來了!地瓜機器人與古月居發布新書《ROS 2智能機器人開發實踐》
12月7日-8日,為期兩天的ROSCon China 2024在上海圓滿落幕,來自全球的ROS專家學者、開發者、企業代表齊聚一堂,共享機器人前沿技術成果。地瓜機器人攜手眾多RDK生態產品亮相,并聯
發表于 12-10 10:56
?278次閱讀
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
本帖最后由 Tronlong創龍科技 于 2024-7-19 17:18 編輯
ROS系統是什么
ROS(Robot Operating System)是一個適用于機器人的開源的
發表于 07-09 11:38
米爾瑞米派集聚5種操作系統,兼顧學習開發和項目產品需要的派
靈活、可靠且高效的機器人系統。ROS 2在瑞米派平臺上的應用提供了許多關鍵功能和優勢。首先,ROS 2采用了一種分布式架構,支持多個節點以及節點間的通信。這使得不同的模塊可以并行
發表于 07-05 17:26

國產Cortex-A55人工智能教學實驗箱_基于Python機械臂跳舞實驗案例分享
一、實驗目的
本實驗通過TL3568-PlusTEB教學實驗箱修改機械臂不同舵機的角度,增加延遲時間,從而做到機械臂跳舞的效果。
二、實驗原理
ROS(機器人操作系統)
ROS(
發表于 06-28 14:37
用悟空派全志H3開發板做一個基于ROS系統的全向輪小車
算:
5、總結
悟空派H3開發板在ROS系統下構建全向輪小車的試用中表現出色。
其強大的硬件性能、ROS支持和控制操作性能使其成為機器人開發
發表于 05-06 11:15
基于鴻道(Intewell?)操作系統研發的農業機器人操作系統
江蘇大學與科東軟件聯合研發“農業機器人操作系統”,并成立“農業機器人操作系統”聯合實驗室,奮力推進農業智能化,推動農業科技創新。“農業機器人
ZMC900E控制器之ROS2環境安裝指南
ZMC900E是致遠電子研發的最新一代高性能EtherCAT控制器,支持ROS2系統,兼備強大功能和實時性,為工業應用帶來新的可能。本文將詳述ROS2特點和安裝,助力用戶在機器人上的二

技術融合與創新大象機器人水星Mercury X1人形機器人案例研究!
定位與映射(SLAM)、機器人操作系統(ROS)、開源計算機視覺(OpenCV)和S-Tag標記碼技術來實現復雜環境中的精確物體抓取和移動。 此案例不僅展示了
ROS機器人操作系統的實現原理
面對序列化,很多人心中可能會有很多疑問。 首先,為什么要序列化?或者更具體的說,既然對象的信息本來就是以字節的形式儲存在內存中,那為什么要多此一舉把一些字節數據轉換成另一種形式的、一維的、連續的字節數據呢?

實現機器人操作系統——ADI Trinamic電機控制器ROS1驅動程序簡介
摘要 機器人操作系統(ROS)驅動程序基于ADI產品而開發,因此可直接在ROS生態系統中使用這些產品。本文將概述如何在應用、產品和

SLAMWARE ROS SDK的基礎架構、部署方法和應用示例介紹
ROS作為機器人行業應用最廣泛的基礎架構之一,是很多用戶開發機器人應用的首選框架,如果要在基于ROS開發的系統中集成思嵐科技的

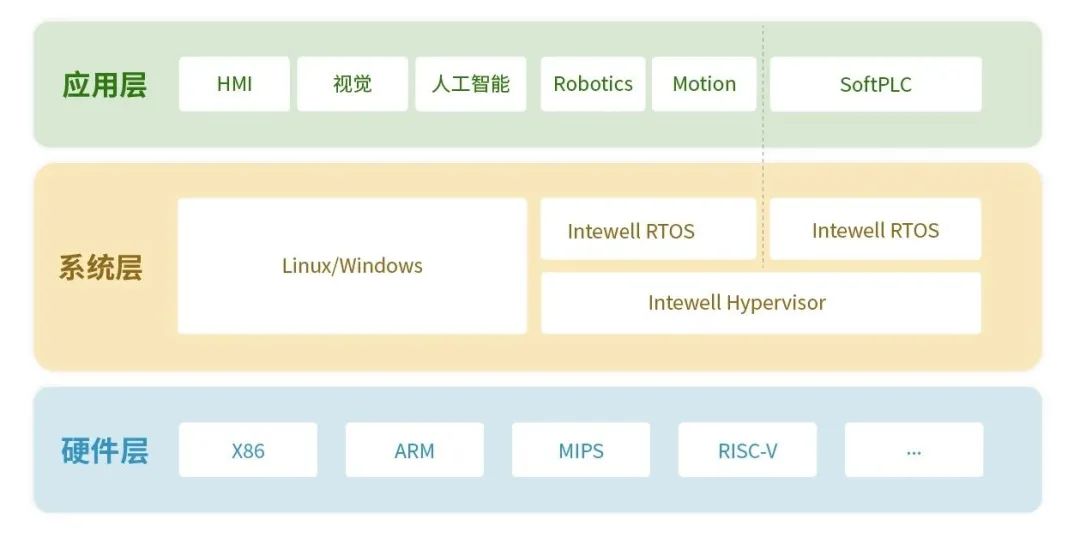
工業控制:鴻道(Intewell)操作系統工業機器人控制解決方案
鴻道(Intewell)操作系統作為核心基礎軟件,構建機器人控制系統的底層技術平臺。系統支持Linux/Windows的實時擴展,設備上可同時運行
系統鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發環境嗎?
請問一下,百度文庫資料里面,下圖所示的系統鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發環境嗎?與前面4GB版本的鏡像有什么區別?
發表于 03-01 23:06





 工商網監
工商網監
評論