 步進電機力矩控制 | 適用于夾爪及開瓶蓋場合
步進電機力矩控制 | 適用于夾爪及開瓶蓋場合
隨著工業及高精度工藝的飛速發展,機械自動化的運動控制替代了許多人工重復性的工作,智能化的生產線讓企業在效率上得到了大大的提升。應對不同的生產環境,工業機器人夾爪的性能起到了至關重要的作用,柔性、自動控制、自動反饋、智能抓取等復雜操作,是企業核心技術及生產效率的核心。
Trinamic步進伺服控制器,能夠實現電機的力矩控制(扭矩控制)。特別是應用在一些機器人夾爪、工業夾爪、實驗室自動化、開蓋扭瓶蓋等場合。
Trinamic如何實現力矩控制
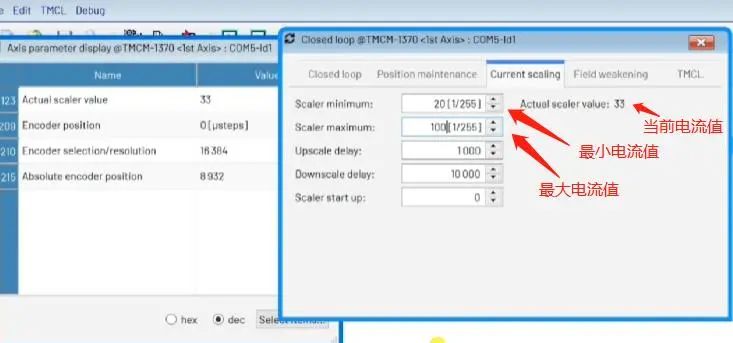
扭矩(力矩)控制,用Trinamic的一體式步進伺服閉環控制器為例,支持串品或者是CAN通信,通過TMCL-IDE上位機軟件進行設定它的力矩值,通過軟件上傳指令,如設定最小電流/電大電流,電機工作時它的電流會在這最大值與最小值之間,負載越大電流值越大,當我們需要力控制的時候,我們可以通過編碼器反饋的值來進行設定一個合適的值,當外面的力達到所設定的值時,就會觸發一個輸出信號。
靈活性與安全性
面對不同的物體,我們擔心的是輸出的力會損失被夾的物體。那我們可以根據實際所需要的設置最大的力,也就是它的最大電流值,對于夾爪外部用力的控制也體現的相當靈活。我們也可以通過程序,讓它達到所設定的最大值時,自動停下來。
在夾爪工作的同時,程序會不斷的監控它的力,不讓它輸出的力大于某一個值,當它達到這個值時,電機就會停下來,并且始終保持這個力,但又不會夾壞這個物體,確保物體的安全性,也同時提升了夾爪的的性能。
總結
Trinamic的運動控制及上位機軟件,能夠讓您輕松的掌握它的控制方法,讓項目更快完工。步進伺服的力矩控制,在實現位置、速度閉環的同時,它會隨著負載而不斷發出信號,我們也可以讓這個信號做出更多動作,如停止、保持一段時間、反轉等,當信號結束后,又會回到原來的位置,更有利于夾爪或者其他應用場合的工作靈活性與安全性。
-
電機
+關注
關注
142文章
9088瀏覽量
146385
發布評論請先 登錄
相關推薦
步進電機驅動器的主要驅動方式有哪些?簡單介紹
淺談步進電機控制策略方式有哪些?
步進電機主要有哪些分類?步進電機的主要構造是什么?
光電式傳感器有幾種類型各適用于哪些檢測控制場合
步進電機的伺服控制方法有哪些
電動夾爪PK氣動夾爪,優勢何在?
TIDM-02010-具有數字交錯式 PFC、適用于 HVAC 的雙電機控制 PCB layout 設計

東芝推出適用于電機控制的Arm Cortex-M4微控制器
電動夾爪的運動控制方案

求一種電動夾爪的運動控制方案






 工商網監
工商網監
評論