 幾種經典的雙目匹配的算法
幾種經典的雙目匹配的算法
在深度相機的主流技術方案Structure Light,ToF,Stereo Dual)中,主動雙目成像方案可以基于低成本的硬件,獲得高分辨率、高精度的深度圖像,但是立體匹配算法(stereo matching)復雜,對計算資源消耗很大。那我們介紹下幾種經典的雙目匹配的算法。
【雙目匹配】
雙目立體視覺理論建立在對人類視覺系統研究的基礎上,通過雙目立體圖象的處理,獲取場景的三維信息,其結果表現為深度圖,再經過進一步處理就可得到三維空間中的景物,實現二維圖象到三維空間的重構。Marr-Poggio-Grimson [1] 最早提出并實現了一種基于人類視覺系統的計算視覺模型及算法。雙目立體視覺系統中,獲取深度信息的方法比其它方式(如由影到形方法)較為直接,它是被動方式的,因而較主動方式(如程距法)適用面寬,這是它的突出特點。
雙目立體視覺系統中,深度信息的獲得是分如下兩步進行的:
(1) 在雙目立體圖象間建立點點對應,
(2) 根據對應點的視差計算出深度。
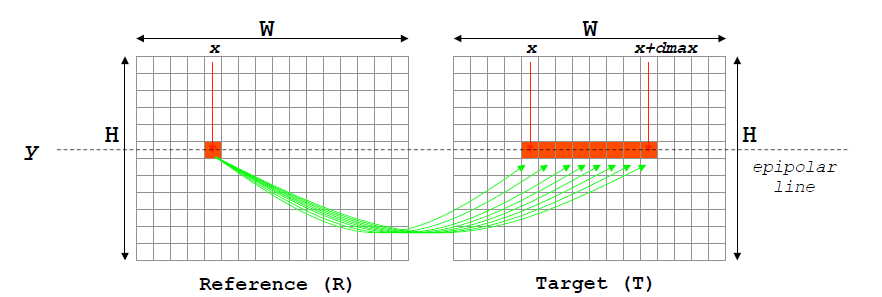
第一部分,也就是對應點問題,是雙目立體視覺的關鍵; 第二部分是攝像機模型問題。雙目立體視覺模型中,雙攝像機彼此參數一致,光軸平行且垂直于基線,構成一共極性 (epipolar) 結構,這樣做是為了縮小對應的搜索空間,只有水平方向的視差,簡化了對應過程
【立體匹配算法介紹】
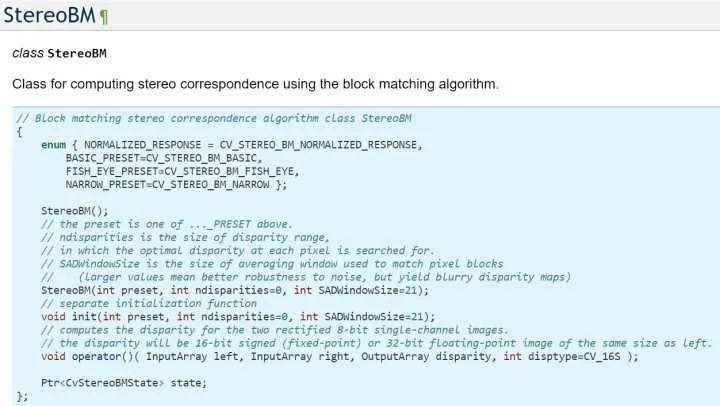
BM
其中minDisparity是控制匹配搜索的第一個參數,代表了匹配搜蘇從哪里開始,numberOfDisparities表示最大搜索視差數uniquenessRatio表示匹配功能函數,這三個參數比較重要,可以根據實驗給予參數值。
該方法速度最快,一副320*240的灰度圖匹配時間為31ms
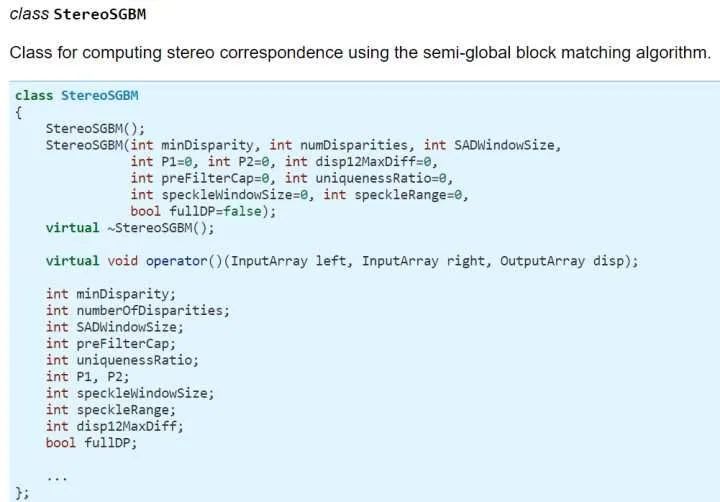
SBGM
SGBM算法 Stereo Processing by Semiglobal Matching and Mutual Information
作為一種全局匹配算法,立體匹配的效果明顯好于局部匹配算法,但是同時復雜度上也要遠遠大于局部匹配算法。算法主要是參考Stereo Processing by Semiglobal Matching and Mutual Information。
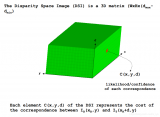
通過選取每個像素點的disparity,組成一個disparity map,設置一個和disparity map相關的全局能量函數,使這個能量函數最小化,以達到求解每個像素最優disparity的目的。
能量函數形式如下:

D指disparity map。E(D)是該disparity map對應的能量函數。
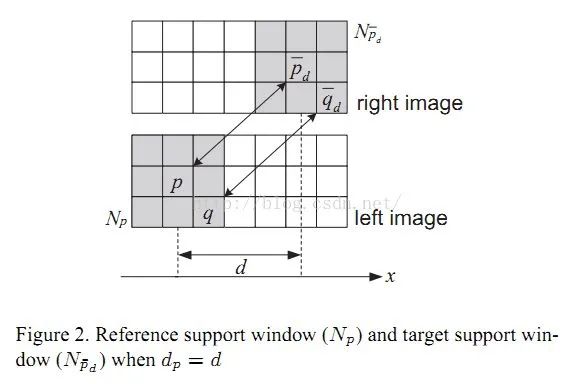
p, q代表圖像中的某個像素
Np 指像素p的相鄰像素點(一般認為8連通)
C(p, Dp)指當前像素點disparity為Dp時,該像素點的cost
P1 是一個懲罰系數,它適用于像素p相鄰像素中dsparity值與p的dsparity值相差1的那些像素。
P2 是一個懲罰系數,它適用于像素p相鄰像素中dsparity值與p的dsparity值相差大于1的那些像素。
I[.]函數返回1如果函數中的參數為真,否則返回0
利用上述函數在一個二維圖像中尋找最優解是一個NP-complete問題,耗時過于巨大,因此該問題被近似分解為多個一維問題,即線性問題。而且每個一維問題都可以用動態規劃來解決。因為1個像素有8個相鄰像素,因此一般分解為8個一維問題。
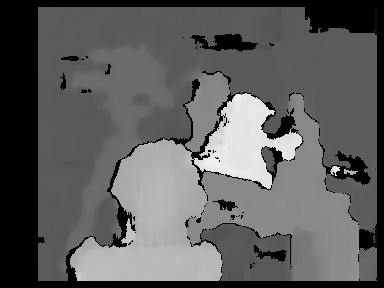
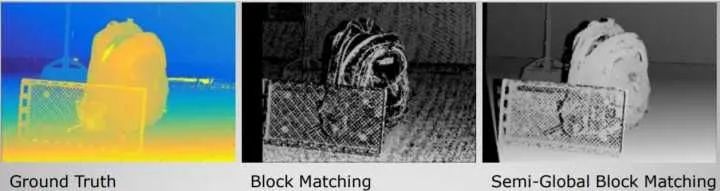
OpenCV中自帶了BM和SBGM,效果對比如下圖:
GC
GC算法 算法文獻:Realistic CG Stereo Image Dataset with Ground Truth Disparity Maps

SAD
SAD(Sum of absolute differences)是一種圖像匹配算法。基本思想:差的絕對值之和。此算法常用于圖像塊匹配,將每個像素對應數值之差的絕對值求和,據此評估兩個圖像塊的相似度。該算法快速、但并不精確,通常用于多級處理的初步篩選。
基本流程
輸入:兩幅圖像,一幅Left-Image,一幅Right-Image 對左圖,依次掃描,選定一個錨點:
(1)構造一個小窗口,類似于卷積核; (2)用窗口覆蓋左邊的圖像,選擇出窗口覆蓋區域內的所有像素點; (3)同樣用窗口覆蓋右邊的圖像并選擇出覆蓋區域的像素點; (4)左邊覆蓋區域減去右邊覆蓋區域,并求出所有像素點灰度差的絕對值之和; (5)移動右邊圖像的窗口,重復(3)-(4)的處理(這里有個搜索范圍,超過這個范圍跳出); (6)找到這個范圍內SAD值最小的窗口,即找到了左圖錨點的最佳匹配的像素塊。
【匹配陷阱】
以下幾種情形生成的深度圖像可能會有缺陷:
(1) 光學失真和噪聲(亮度、色調、飽和度等失衡)
(2) 平滑表面的鏡面反射
高光處無細節,無特征點。
(3) 投影縮減(Foreshortening)
攝影測量學中的一個概念,指物體近大遠小。由于相對左右照相機距離的不同,看到的同一個物體在左右視圖中的投影尺寸也會不同,造成匹配障礙。
(4) 透視失真(Perspective distortions)
由于鏡頭畸變造成的被攝物體失真。譬如畫面中的鼻子被拉長。
(5) 低紋理(Low texture)
無細節。主動紋理光可以解決這一問題。
(6) 重復紋理(Repetitive/ambiguous patterns)
高度相似的特征點描述向量接近,行掃描時難以判斷哪一個是對應的特征點。
(7) 透明物體
同低紋理。
(8) 重疊和非連續
紋理中斷,不利于行查找。
-
攝像機
+關注
關注
3文章
1618瀏覽量
60317 -
硬件
+關注
關注
11文章
3381瀏覽量
66447 -
三維空間
+關注
關注
0文章
17瀏覽量
7512
原文標題:【3D視覺】立體匹配成像算法BM,SGBM,GC,SAD一覽
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
雙目立體視覺三大算法原理及其代碼實現

雙目影像密集匹配算法的綜合分析
雙目立體視覺原理大揭秘(一)
【Firefly RK3399試用申請】基于雙目攝像頭的視覺景深算法開發
LabVIEW開發自動駕駛的雙目測距系統
雙目視覺立體匹配算法研究
雙目立體計算機視覺的立體匹配研究綜述

一種基于PatchMatch的半全局雙目立體匹配算法

幾個經典的立體匹配算法的評價指標和數據集
雙目立體匹配的四個步驟





 工商網監
工商網監
評論