 三角法測距原理
三角法測距原理
激光雷達根據原理可以分為TOF(飛行時間),三角法測距和相位測距三種方式。
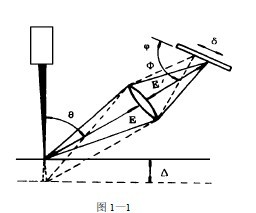
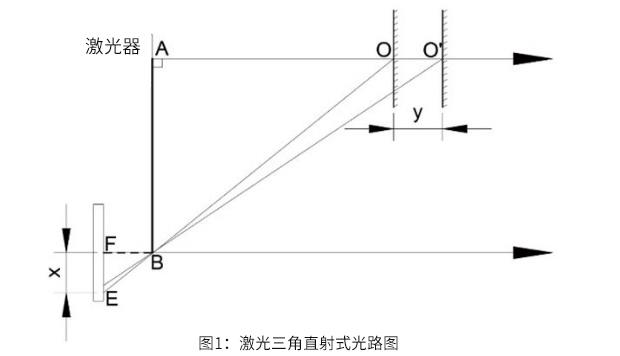
三角法測距為
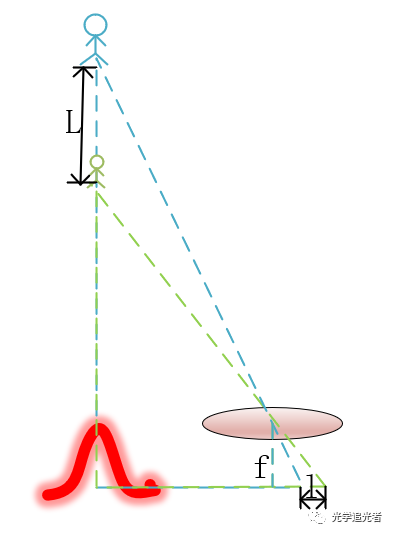
三角測距法是利用相似三角形本地可以測得透鏡中心和照射到CMOS/CCD上的距離,就可以得到物距,本地的分辨率l決定了探測物體的分辨率。因此當物距越大,探測精度越低。因此該方法測距較短且需要大面積的光電探測器。
TOF為目前大多數的自動駕駛采用的雷達方案,通過發射脈沖激光,計算脈沖激光經過目標并反射回探測器的時間,即飛行時間。飛行時間等于脈沖數n和脈沖間隔t的乘積,距離就等于飛行時間和速度的乘積,如下面公式所示,f為脈沖頻率。
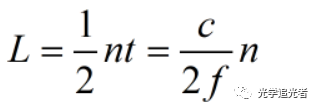
這種方式簡單直接,測距的精度不隨距離增加而惡化,但是由于光速快,短距下對器件的響應時間要求高。
TOF另一種精度更高的測距方式為測量調制信號和初始信號的相位差。對激光器發出的光進行幅度調制,調制信號經過反射后進行探測,檢測該回波信號的相位和原始相位差,根據已知的調制信號的角頻率即可獲得距離
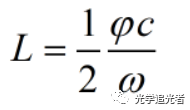
由于相位檢測只能在一個2pi區間內,因此測距存在不準確性,為了提高測距的準確度,需要使用不同角頻率的調制信號多次測量,測量效率低。
FMCW為Frequency modulated continuous wave,即調頻連續波,從名字就可知在測距過程中發射的頻率是變化且在時間上連續的。
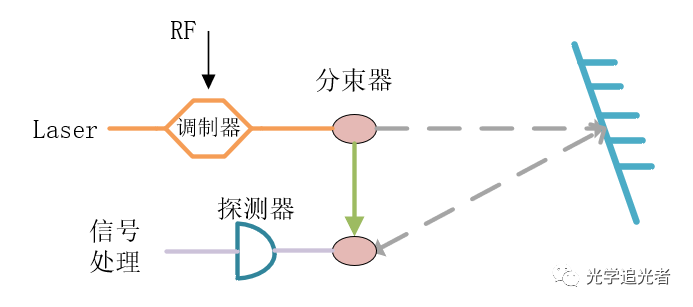
上圖為相干探測過程。RF信號頻率在一定范圍內改變,通常為三角波或者鋸齒波。調制器將RF信號調制到光頻域上,輸出的頻率范圍假設為f1和f2,三角波周期為T,則輸出頻率為
分束器分出一部分光用作參考光,剩余部分經過放大器向空間發射,經過物體表面反射回來,和參考光合束后在PD中拍頻。通常受限于帶寬,和頻被濾掉,剩余差頻以及相位關系。

差頻與回波信號相對于參考信號的延時有關。從上述公式以及相位測距的公式對比,可以發現FMCW就是通過將相位差轉化為頻率差嚴格的測出相位差(延時),而探測器很容易測出差頻的頻率。FMCW的優勢明顯,測量精度高,抗干擾能力強,同時也可以測速度,拍頻后頻率低,易于信號處理,而且不像脈沖激光器需要高功率打出去,FMCW的峰值功率為百mW量級,比TOF低四個數量級,比較安全。
目前能夠提供基于FMCW的激光雷達應該只有Aeva, Mobieye和Aurora,而且均沒有量產。目前FMCW激光雷達主要的難點在于使用的是1.5um波長的光,在空氣中傳播損耗大,且受天氣影響嚴重;基于硅芯片的FMCW需要調制信號,對調制器的線性度要求較高,而且成本也是一大問題,硅光始終沒有大規模應用,封測成本都比較高。
-
雷達
+關注
關注
50文章
2966瀏覽量
118011 -
調制器
+關注
關注
3文章
842瀏覽量
45325 -
三角測距
+關注
關注
0文章
19瀏覽量
768
原文標題:一文了解TOF、三角法測距和相位測距以及FMCW激光雷達測距原理
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
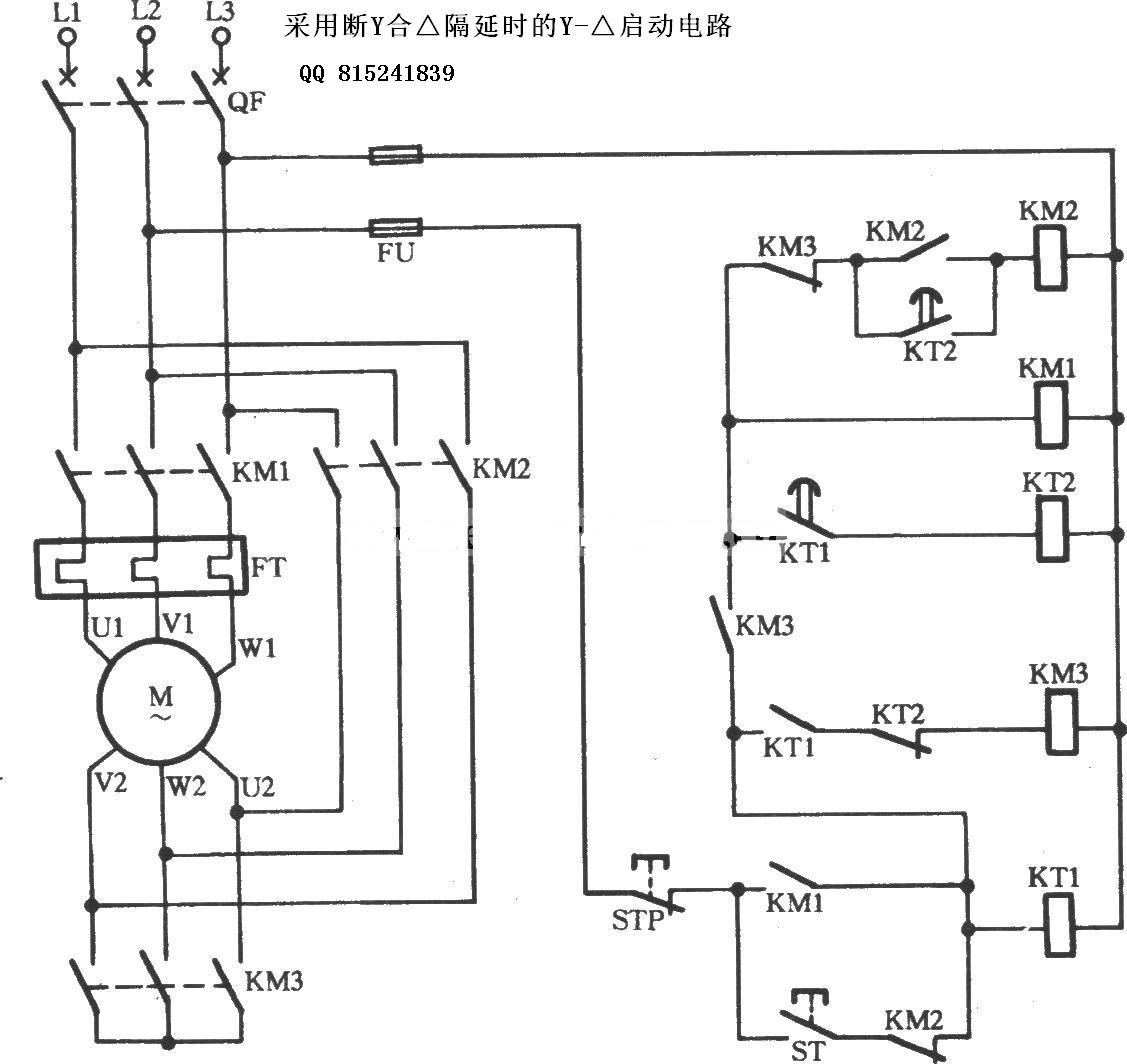
星三角啟動電路圖工作原理和星三角啟動電路實物接線講解
闡述基于激光三角測距法的激光雷達原理

三角波比較法PWM跟蹤算法
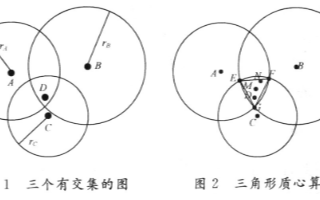
基于RSSI技術的三角形質心算法的建模與仿真研究
單片機畢設之 -- 基于單片機的紅外測距系統設計與實現







 工商網監
工商網監
評論