 劍橋大學開發出具有觸覺感應功能的新型水凝膠皮膚
劍橋大學開發出具有觸覺感應功能的新型水凝膠皮膚

幾十年來,機器人專家一直致力于研發在外觀和功能上都能模仿人類的機器人。近期的技術進步為類人機器人帶來了新的前景,例如使用改進的傳感器和柔軟的人造皮膚。
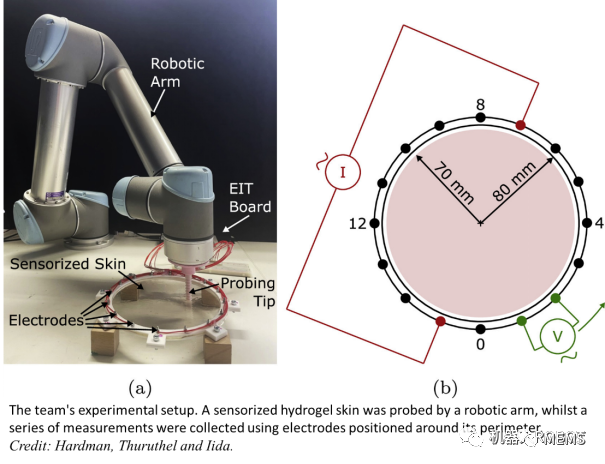
劍橋大學仿生機器人實驗室的研究人員在此方面取得了重要進展,開發出一種基于水凝膠的皮膚,通過使用一系列基于電極的硬件系統和無模型計算方法重建觸覺刺激,能夠使機器人檢測損傷、感知物體或人類的觸摸,并監測其周圍環境。
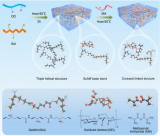
水凝膠是一種不溶于水但含有大量水分的凝膠,具有很好的柔韌性和生物相容性。研究人員利用專門開發的傳感水凝膠作為皮膚的基礎,將水凝膠材料與電阻抗斷層掃描硬件相結合,該硬件使用安裝在皮膚邊緣的電極施加電流并測量電壓,從而提供與皮膚狀態有關的信息,推斷人造皮膚被觸摸的位置,以及是否有受損。
與傳統的基于神經網絡的人造皮膚系統不同,這種水凝膠皮膚不需要復雜的計算模型來分析電極數據,而是使用少量真實數據的簡化方法為基于水凝膠的系統生成變形圖。在初步評估中,研究人員發現基于水凝膠的系統明顯優于基于傳統神經網絡的人造皮膚系統,在170毫米的圓形皮膚上實現了12.1毫米的平均分辨率。
目前為止,研究團隊對這種新型水凝膠皮膚進行了三項實際應用測試,即損傷檢測、環境監測和觸覺刺激識別。該系統在所有三個應用中都表現良好,表明它有潛力提高應用于各種任務的軟體機器人系統的能力。
研究團隊表示,他們目前正在改進皮膚的形狀和尺寸,使其能夠感知更復雜的刺激。例如,將皮膚應用到機械手上,使它不僅能感知皮膚被觸摸的位置和力度,還能感知機械手每個手指的位置以及手是否受損。
-
機器人
+關注
關注
211文章
28643瀏覽量
208424 -
電極
+關注
關注
5文章
829瀏覽量
27315
原文標題:劍橋大學開發出具有觸覺感應功能的新型水凝膠皮膚
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
南京大學:研發水凝膠傳感器動態保水新策略

吉林大學:研究具有3D力檢測功能的自供電柔性電子皮膚觸覺傳感器
觸覺傳感重磅《Nature》!無線、低功耗、多刺激模式觸覺電子皮膚(附原論文)
我國科學家研制出具有仿生三維架構的新型電子皮膚系統
水凝膠半導體材料問世,有望用于生物集成電路
密歇根州立大學:研發抗疲勞力致變色水凝膠新型觸覺傳感器

柔性電子技術革新與人形機器人的電子皮膚應用前景

清華大學研發新型仿生三維電子皮膚系統
具有密集交聯結構的明膠基水凝膠電解質(ODGelMA)
一種可實現穩定壓力傳感的新型可拉伸電子皮膚
劍橋大學運用AI技術快速尋獲帕金森病治療之道

基于顏色變化水凝膠的集成微流控壓力傳感

接近傳感電子皮膚研究進展綜述





 工商網監
工商網監
評論