 一文詳解電子電氣架構的演進
一文詳解電子電氣架構的演進
智能汽車安全新媒體
雖然電子電氣架構的概念在過去的20年間才逐漸發展起來,電子電氣系統卻已經有了超過40年的歷史。在電子電氣架構這個概念尚未出現的年代里,汽車電子電氣系統一直在持續的發展中。
01分布式架構
分布式架構(Distributed Architecture,DA)是最早被命名的電子電氣架構。它的主要特點是整車中的各種功能分散在多個ECU中,各個ECU基本獨立地進行本領域的功能邏輯控制。分布式架構從歷史發展的歷程來看,可以被分為四代,如圖1所示。
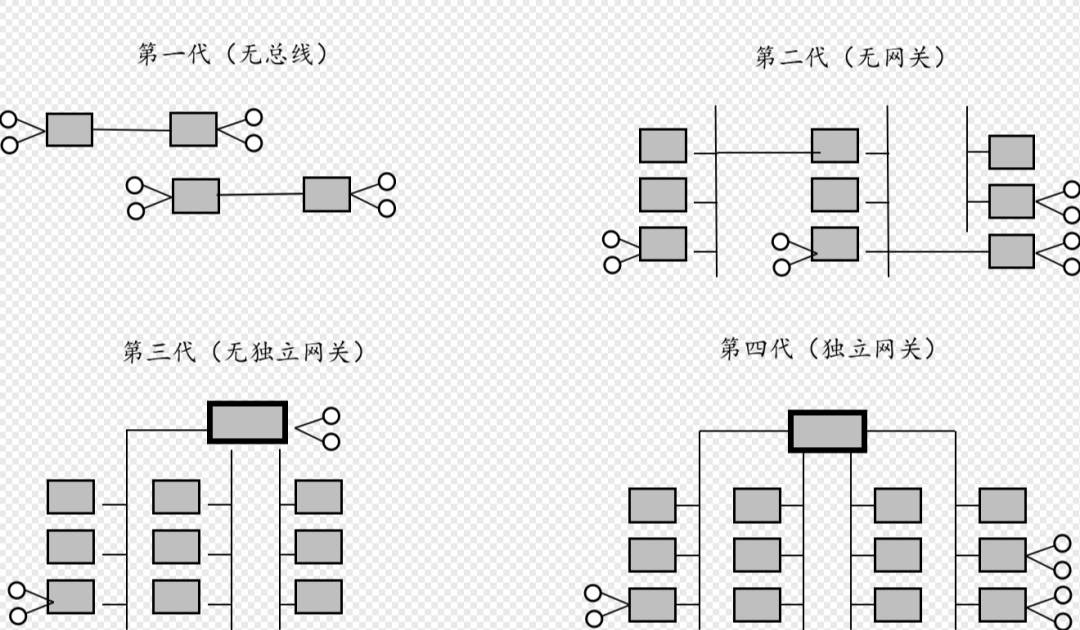
圖1 分布式架構的發展
第一代:無總線階段。
這個階段的各個部件之間沒有總線進行連接,所有的信號都是通過硬線信號(電壓、電流、PWM等)進行傳遞。ECU之間無功能的交互,所有ECU都獨立完成自己的功能。電源供給和控制多采用大電流直接控制。
第二代:無網關階段。
ECU之間已經有了總線的連接,但是因為整車的總線數量較少,信息量也很少,無需網關進行不同網段之間的信息轉換、轉發工作,不同網段基本上保持獨立狀態。ECU之間功能的交互較少,基本上還是處于獨立工作狀態。電源供給和對執行器的控制已經開始采用小電流間接控制。
第三代:無獨立網關階段。
網絡總線數量增加,可以多達三四個網段、數十個節點。一般由BCM來作為全車的網絡中樞并承擔網關的職責,負責進行網絡數據轉發等工作。每個ECU的功能在不斷地增加,ECU之間的交互和功能邏輯的協調變得越來越多越來越復雜。整車的電子電氣系統逐漸開始進行架構級的總體設計。
為了有效優化整個電子電氣系統的設計,功能架構設計成為了整車設計中最重要的環節,各個ECU之間的功能不再是獨立的,而是從整車的層級出發,進行協調一致的設計,ECU間功能的耦合不斷增加。網絡拓撲結構變得越來越復雜,LIN、K-Line、CAN、MOST等總線相繼應用,不同總線之間的信息互相轉發成了基本要求,網絡管理也成了重要的技術。為了對整車的電能消耗進行有效管控,電氣架構的設計逐漸變得重要起來。
第四代:獨立網關階段。
隨著ECU的增加和ECU之間數據量的持續增加,BCM所包含的幾個網絡總線已經無法支撐整車的網絡通信,于是可以支持更多網段的獨立網關逐漸開始普及。獨立網關具有獨立的MCU,可以處理更多的數據,并且存儲空間也更大,因此可以承擔更多的任務。除了可以提供多達十幾條總線接口外,還可以承擔OTA、信息安全防護、臨時數據存儲等任務。在車載以太網、FlexRay等技術開始應用后,網關也隨之升級以支撐這些新的總線形式,成本也隨之大幅度增加。
在分布式架構的發展周期內,各種控制器的整合也在不斷地進行。例如將車窗控制和驅動的功能集成到BCM中,將360環視的功能從獨立的控制器整合到多媒體主機中等等。整合的目的多出于成本的考量,但背后的支撐還是芯片和軟件技術的發展。
隨著電子電氣系統中的ECU數量進一步增加,并且更新迭代速度更快,分布式架構的缺點也逐漸暴露出來,ECU數量眾多且相互之間功能邏輯耦合較多。一方面導致BOM成本和管理成本的不斷攀升,另外一方面整個電子電氣系統的復雜度逐漸接近難以管理的極限。
由于ECU功能之間的協調全部都依賴總線數據的傳遞,導致功能架構、軟件架構和網絡架構的設計都越來越復雜,ECU之間的功能邏輯耦合也越來越嚴重。這讓每一個新功能的加入或變更都可能要同時更改多個ECU的軟件,哪怕只是一個ECU的軟件邏輯變更也可能要導致一條或多條總線上通信矩陣的變更,從而導致該總線上的ECU的軟件變更。
尤其是在OTA技術得到廣泛應用以后,在量產之后更新任何一個功能都可能導致多個ECU需要被同時更新,這大大增加了OTA的復雜度和成本。具體體現在以下幾個方面:
數據流量的成本。整車制造商要為每一字節的數據流量支付流量費用,多個ECU升級意味著數據流量和費用的大幅度增加。
ECU軟件更新的研發成本。更新多個ECU意味著要讓每個ECU的供應商在量產之后還要繼續維護這個ECU的軟件,這就意味著車企不但要花費人力來協調相關的供應商對ECU進行更新,還要被迫支付供應商提出的不一定合理的軟件變更費用。
因為對于大多數供應商來說,如果不是為了保持與車企的良好關系,沒人愿意去花精力來做這種SOP后的軟件更新,他們更愿意把精力投入到新項目的開發中。
而且,在SOP后進行的這些更新所投入的人力必定要從他們正在進行的其他項目中抽調出來,這也意味著對其他項目進度的影響和管理成本的增加。因此,供應商往往會對這種更新報出很高的費用和不一定合理的周期。
驗證成本。多個ECU的變更意味著電子電氣系統的較大變化,為了保證OTA后的質量,相關的各種測試都在所難免。而且,車企的管理成本也會增加。
由于燃油車在發動機停止后只能使用12V鉛酸蓄電池作為整車低壓電網的能量來源,而蓄電池的容量有限,很難支撐整車電子電氣系統的長時間工作,所以如果OTA的耗時較長,將可能出現以下三種結果:
①蓄電池饋電(即蓄電池的電量大幅度低于理想值)導致車輛無法啟動,甚至在蓄電池電量用光的時候OTA還沒有完成,從而導致ECU功能的徹底喪失。
②OTA的時間過長將導致車輛長時間處于不可用狀態,引起用戶抱怨。
③刷新失敗的概率增加。
基于以上原因,汽車工程師開始尋求一種能夠大幅度降低電子電氣系統復雜度、BOM成本和OTA的成本與難度,并且可以簡化功能架構與軟件架構設計的新電子電氣架構形式。
02域控制式架構
軟硬分離是每個車企都希望能夠實現的目標。這樣就可以真正將軟件的迭代和硬件的迭代分開,從而減少對供應商的依賴程度,并因此減少開發成本和縮短整個電子電氣系統的開發周期。
雖然AUTOSAR架構已經實現了應用層軟件的部分重用,但只是減少了應用軟件從一個ECU遷移到另外一個ECU的成本,無法實現整車層級應用層軟件的全部重用。
而且,不同的ECU一般都由單不同的供應商來設計實現,如果一個SWC需要被另外的供應商來編碼實現,則軟件開發工作量減少得并不明顯。
最理想的狀態是車企能把這些軟件都掌握在自己手中并且這些軟件都集中在一個或幾個控制器中,這樣就可以減少付給外部供應商的軟件開發費用,并且可以自己掌控開發節奏。
但是車企畢竟不可能自己掌控所有的ECU的開發和生產制造,原有的供應鏈體系也要繼續維持,否則那些已經在量產或開發狀態中的產品就可能出現風險。
最好的方式就是逐漸轉型,將以前由供應商負責的部分工作逐漸轉移到自己的手中,從而給雙方都有一個過渡的時間。
工作的轉移有兩個階段:首先進行軟件功能的集中化,即大部分軟件轉移到少數控制器中。然后,車企再逐漸接過軟件的開發工作。通過這種方式,既解決了OTA更新中遇到的困難,也能讓車企有更多的話語權并讓軟件開發的成本得到控制。
對于以上的問題,域控制式架構(Domain Control Architecture,DCA)是一種比較理想的解決方案。如果將每個功能域的功能邏輯上移到一個邏輯處理功能更強大的控制器中,下游的ECU僅承擔接受域控制器的指令,并執行輸入、輸出的處理工作或者實時性要求非常高的工作,就可以部分解決分布式架構在更新功能邏輯時所遇到的問題,并使車企有了更多的掌控權。
這里需要再解釋一下“域”這個概念,以免出現混淆。中文中的“域”在英語中可以對應兩個詞:Domain和Zone。
Domain指的是功能域,即一類功能的集合,例如底盤域、動力域、車身域、信息娛樂域等。Zone指的是區域。Domain架構和Zone架構的理念不同,一個是按照功能來劃分,一個是按照物理位置來劃分。域控制式架構指的是按照功能域來進行劃分的架構。
一般來說,域內的功能邏輯之間交互很多,域控制式架構因為大部分功能交互都在域控制器內部進行,從而減少了域內總線數據傳遞的延時,性能可以更好。同時,OTA的難度也降低了(大多數時候只需要更新域控制器即可)。
域控制式架構一般有兩種結構如圖2所示,雖然兩種結構都有中央網關,但是域控制器之間的連接形式有所不同。

圖2 域控制式架構
拓撲A的結構可以被稱為星型域控制式架構(Star DCA)。其中的每一個域控制器(D1、D2、D3和D4)分別單獨連接到網關上,它們之間的信息交換通過網關來進行轉發。
域控制器與網關之間比較適合采用以太網等點到點的網絡介質,能夠傳輸的數據量較大。此種結構可以被稱為星型域控制式架構。
拓撲B的結構可以被稱為樹形域控制式架構(Tree DCA)。其中的每一個域控制器(D1、D2、D3和D4)均連接在一條骨干網總線上,并連接到網關。它們之間可以直接進行信息交換而無需通過網關來進行轉發。這種形式比較適合采用FlexRay等高速總線形式,網絡延遲較少,實時性更好。
網關可以作為車與外界的接口進行數據的傳輸,另外,由于有一些功能需要非常高的實時性和大量的數據傳輸要求,所以網關一般還需要提供一些CAN、LIN或以太網等接口。
例如:從云端下載的大量音視頻和OTA的數據就不適合從骨干網中進行傳輸,因為這會占用大量的骨干網的帶寬,并且速率也不如以太網(100M甚至1000M)高,因此,此類數據還是使用以太網等點到點的網絡介質更為合適。
03集中控制器架構
當域控制式架構實現之后,下一步就可以進行域控制器之間的整合,以及下游ECU之間的整合。
得益于芯片技術的飛速發展,尤其是SoC的成本下降和逐漸普及,域控制器之間的整合在理論上已經沒有特別大的障礙,最大的門檻是對技術的掌握程度。
雖然軟件移植和開發的工作量非常大,但是這個困難是可以通過資金和人員的投入可以解決的。而真正的困難是那些用錢解決不了的問題。
對于那些從來沒有進行過控制器內部詳細設計的車企而言,進行域控制開發的最大難題是對控制器內部各種詳細知識的掌握,而這種能力并非短時間可以迅速增長,需要通過長時間在相應專業領域的浸淫所獲得的經驗與知識積累的支撐。
在集中控制式架構(Centralized Control Architecture,CCA)的結構中,HPC是架構的核心,可以看作整車網絡中的中央服務器,負責所有的邏輯功能控制和數據處理工作。車企心目中最理想的情況是由一個強大的HPC來處理車上的所有計算任務,如圖3中的拓撲D。
然而由于當前芯片的限制,只使用一個HPC還有很多的困難,例如算力和通信端口的數量等,因此很多車企目前所采用的方案還是采用至少兩到三個HPC來處理不同域的任務:如車身域、信息娛樂域和智駕域,如圖3中的拓撲C。由于三個域處理的任務特點不同,相應SoC的能力不同、資源也不同。
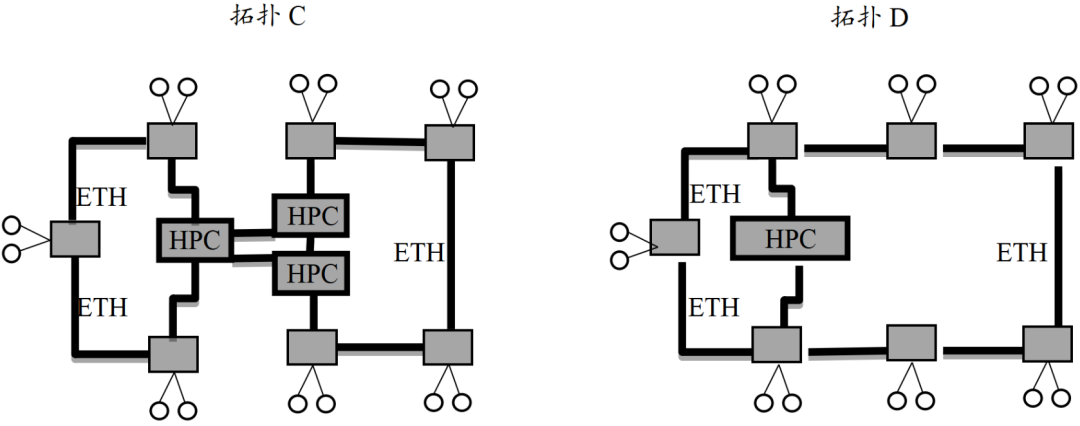
圖3集中控制式架構
理論上,由于集中式的架構已經將所有的邏輯和數據處理都集中到HPC中,因此下游的傳統ECU僅需要承擔輸入和輸出的處理,所以將不同功能域的硬件按照所在區域進行重新整合成為可能。
通過將傳感器和執行器按照所在區域就近接入ECU,ECU再通過高速總線接入HPC,就可以實現區域控制。這種負責每個區域控制的ECU通常被稱為區域控制器(Zonal Controller,ZC)或區域控制模塊(Zonal Control Module,ZCM)。
如果再將各個用電器的電源通過區域控制器進行就近供給,就可以將整車線束的長度、重量和回路數大幅度減少。
據測算,在實現同等功能的條件下,回路數可以減少20%以上,長度可以減少30%以上。區域控制的最大收益在于線束的減少,因為線束是整車中第三重的部件,可以達到50kg甚至更重,綜合成本也可以在整車的電子電氣部件中排到前三位,豪華車中線束的成本可以超過6000元。
然而,凡事有利必有弊,區域控制在帶來眾多好處的同時也必然有弊端。
首先是成本變化不明顯。雖然節省了一部分線束的成本,但是由于區域控制器一般不會再采用傳統的保險絲方案,而使用大功率半導體器件或eFuse來實現智能配電,而由于這些大功率半導體器件的價格仍然較高,所以整車的綜合成本仍然可能高于傳統的基于保險絲方案的成本。
其次是配置的靈活性與梯度差。由于每個區域控制器都集成了多個功能并替代了一部分傳統ECU,那么,當車輛需要進行不同的配置梯度時就只能采用兩種方式:
①不同的配置采用不同的區域控制器。這會大大增加區域控制器的軟硬件開發、驗證費用。如果總銷量不高,則研發成本會大幅度增加。
②高低配采用同樣的區域控制器,通過相應的軟件進行配置。這樣雖然減少了研發成本,但是單車的BOM成本卻必然增加。
無論如何,成本是任何一種方案都永遠無法回避的問題。集成度與靈活性是相互矛盾的兩個變量,只有綜合考慮了整個架構周期內所有產品的綜合成本與收益后做出來的決策才是明智的決策。
04車云一體式架構
由于5G技術、V2X的發展,使得通過包括路端V2X設備和云端對車輛進行高實時性控制成為可能。這在理論上提供了一種新架構形式的可能性,即將大量運算能力要求高的工作放到云端(包括路端V2X設備)的服務器進行處理,車端負責本地數據采集的和執行。這種理想中的架構可以被稱為車云一體式架構(Vehicle Cloud Architecture,VCA)。
然而,由于高速移動網絡的普及程度尚未達到很高的覆蓋度,云端處理能力也無法支撐上億輛汽車的并發實時性控制,從而無法滿足任意車輛在任意時刻和任意位置的控制需求。
而且由于移動網絡的可靠性還達不到對車輛進行可靠控制的程度,因此,VCA在目前階段僅能實現部分的功能,如語言、圖像、用戶賬戶信息等實時性、可靠性要求不高的數據的云端同步處理。
如果我們足夠樂觀,在不遠的將來,在滿足至少如下幾個條件之后,車端的架構將可能又重新變成去中心化。
云端的實時計算能力與可靠性迅速提升到可以滿足對車端控制的需求。
移動通信與V2X等基礎設施、設備的普及程度已經覆蓋大部分用車場景。
云端的計算與通信成本大幅度下降。
信息安全和相關的技術已經足夠成熟,相應的法規和標準已經完備并被普遍遵守。
在滿足上述條件的時候,真正的車云一體化架構才能真正得以實現,如圖4所示。
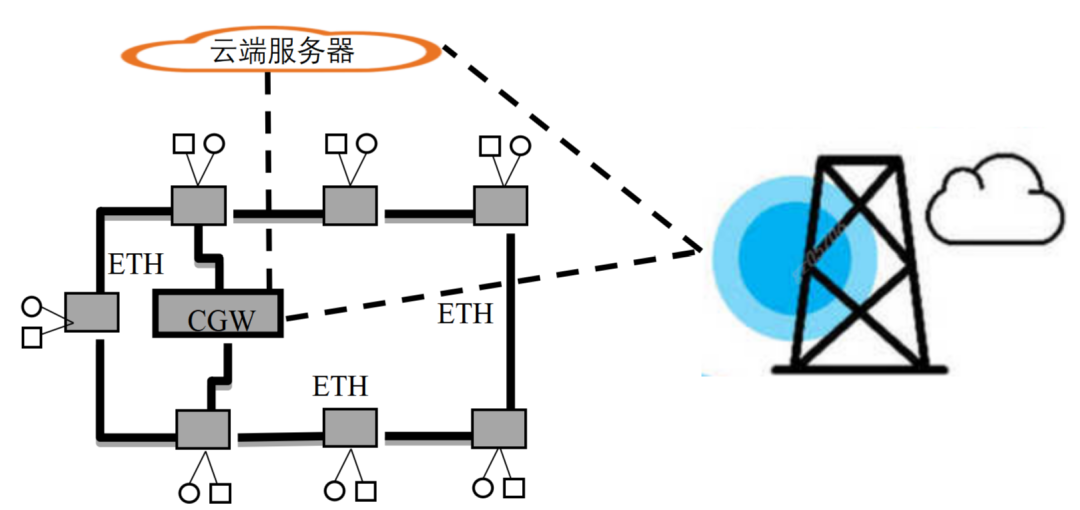
圖4 車云一體化式架構
車云一體化架構具有如下特征:
支持高等級的自動駕駛功能。
區域控制器僅負責支撐所有傳感器和執行器的控制。
主要功能邏輯和數據的處理都由云端完成。
云端與車端可以持續通過通信網關進行大量的、實時的數據交換。
在車端與云端的通信鏈路出現故障之后,車端依然可以支持駕駛員手動控制的基本操作。
將大量的計算能力放在云端,可以充分利用云端能力可以共享的特點,從而不必讓每臺車都需要具備滿足高等級自動駕駛的超強算力,充分利用V2X以及邊緣計算技術也可以大幅度減低車輛對車端傳感器的配置需求。同時,各種自動駕駛的算法模型都可以實現實時的迭代更新。從理論上來說可以大幅度降低整個系統的成本,并降低車輛實現自動駕駛的門檻。
05電子電氣架構發展的終極暢想
汽車最終會發展成什么樣子?電子電氣架構最終會發展成什么樣子?這個問題我們永遠只能進行暢想,因為這取決于很多無法回答的問題的答案。
人類的想象力永遠都只是基于當下的認知和經驗來對未來進行猜測。正如住在山洞中的原始人不會想到時裝,使用烽火臺進行報警的古人不會想到未來會有電報和手機,每天開汽車的我們現代人也無法想象一百年或一千年之后的世界是什么樣子。
無論未來的世界究竟會是怎樣的,只要人類的科技還在發展、汽車這種工具依然存在,在我們可以預見的未來,汽車電子電氣系統將朝著如下方向持續發展。
減少交通事故、減輕人類駕駛時的體力和精力消耗將是長期的努力方向。
單體汽車消耗的能量將越來越多。
電能作為汽車的直接能源或間接能源將徹底取代所有化石能源。
如果將控制器定義為以電能為能源的、具有一定數據采集、邏輯處理和設備驅動能力的軟硬件結合體,那么控制器將永遠不會消失,甚至會數量越來越多,因為車輛需要采集的數據、需要執行的功能將越來越多。
芯片的持續發展將徹底改變整個汽車電子的產業鏈。
在摩爾定律失效后,新的計算形式將徹底解決當前的算力不足問題。
電力線通信技術(Power?Line?Communication,PLC)和車內無線通信技術將最終取代現有的所有通信總線形式。
未來的汽車將逐漸融入到整個人類社會的計算網絡中。
人工智能領域技術的發展將大大促進汽車智能化的持續提升。目前所謂的“智能汽車”依然只是人類精心設計的復雜機器,并未擁有真正的智能。
隨著傳統意義上的軟件逐漸消失,軟件將不再定義汽車,取而代之的是“智能定義汽車”。
我無法對所有的趨勢和推論給出完整的理由和解釋,這個世界本來就不是完全理性的,有時候那些毫無根據的猜測反倒是最真實的。
本文節選自廣汽集團電子電氣架構總師侯旭光的新作《智能汽車:電子電氣架構詳解》。
審核編輯:湯梓紅
-
控制器
+關注
關注
112文章
16445瀏覽量
179447 -
網關
+關注
關注
9文章
4586瀏覽量
51494 -
總線
+關注
關注
10文章
2903瀏覽量
88392 -
ecu
+關注
關注
14文章
892瀏覽量
54745 -
智能汽車
+關注
關注
30文章
2890瀏覽量
107560
原文標題:廣汽集團電子電氣架構總師:一文厘清電子電氣架構的演進
文章出處:【微信號:談思實驗室,微信公眾號:談思實驗室】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
電子電氣架構演進和發展趨勢
保時捷Taycan的電子電氣架構詳解
什么是電子電氣架構?汽車電子電氣架構面臨的挑戰
詳解特斯拉電子電氣架構
詳解特斯拉電子電氣架構
深度解讀汽車電子電氣架構演進歷程



英飛凌:半導體賦能智能駕駛和整車電子電氣架構的演進







 工商網監
工商網監
評論