") 多式數(shù)據(jù)可視化微觀服務(wù)
多式數(shù)據(jù)可視化微觀服務(wù)
概覽概覽
通過(guò)Grafana* 儀表板將視頻分析和時(shí)間序列分析數(shù)據(jù)視覺化成視頻分析和時(shí)間序列分析數(shù)據(jù)。開放邊緣透視(OEI) 信息總線、 WebRTC* 或 HTTP 協(xié)議, 并使用儀表板顯示, 在同一儀表板中同時(shí)流多個(gè)視頻。 它還可以訂閱 OEI 信息總線來(lái)接收格拉法納儀表板上的時(shí)間序列分析數(shù)據(jù) 。
多模式數(shù)據(jù)可視化微觀服務(wù)可與邊緣視頻分析微觀服務(wù)獨(dú)立使用,也可與工業(yè)(EII)微觀服務(wù)生態(tài)系統(tǒng)的邊緣透視獨(dú)立使用。
選定配置 下載下載微觀服務(wù)和下列軟件。
配置 下載
完成時(shí)間 :15分鐘15分鐘
語(yǔ)言:Python* 3
可用軟件 :邊緣視頻分析
目標(biāo)系統(tǒng)要求
下列處理器之一:
英特爾第6至11代核心提款機(jī)處理器
第一至第三代英特爾Xeon可縮放處理器
Intel Atom處理器,帶有Intel流SIMD 擴(kuò)展4.2(Intel SSE4.2)
至少8GB內(nèi)存。
至少64GB硬盤。
互聯(lián)網(wǎng)連接。
Ubuntu* 20.04 LTS Kernel 5.4*
使用Kernel 5.8 用于第11代 Intel CoreTM 處理器。
如何運(yùn)作
多式聯(lián)運(yùn)數(shù)據(jù)可視化微觀服務(wù)由作為Docker集裝箱圖像包裝的兩個(gè)部件組成:
多式聯(lián)運(yùn)數(shù)據(jù)-可視化-流
多式聯(lián)運(yùn)數(shù)據(jù)可視化
通過(guò)HTTP、WebRTC或OEI OEI 消息管道使用Grafana* 的多式聯(lián)運(yùn)數(shù)據(jù)可視化容器將網(wǎng)頁(yè)嵌入格拉法納儀表板,使用AJAX面板將視頻流嵌入Dashboard。它可以在同一 Grafana儀表板上顯示多個(gè)視頻。此外,除了視頻外,它還可以顯示與視頻分析和時(shí)間序列分析有關(guān)的度量。
當(dāng)多式聯(lián)運(yùn)-數(shù)據(jù)-可視化集裝箱開始使用時(shí),它根據(jù)所選的虛擬化微觀服務(wù)模式在格拉法納裝載一個(gè)儀表板配置,多式聯(lián)運(yùn)-數(shù)據(jù)-可視化部分使用格拉法納服務(wù),該服務(wù)暴露了格拉法納3000港的格拉法納網(wǎng)絡(luò)界面。
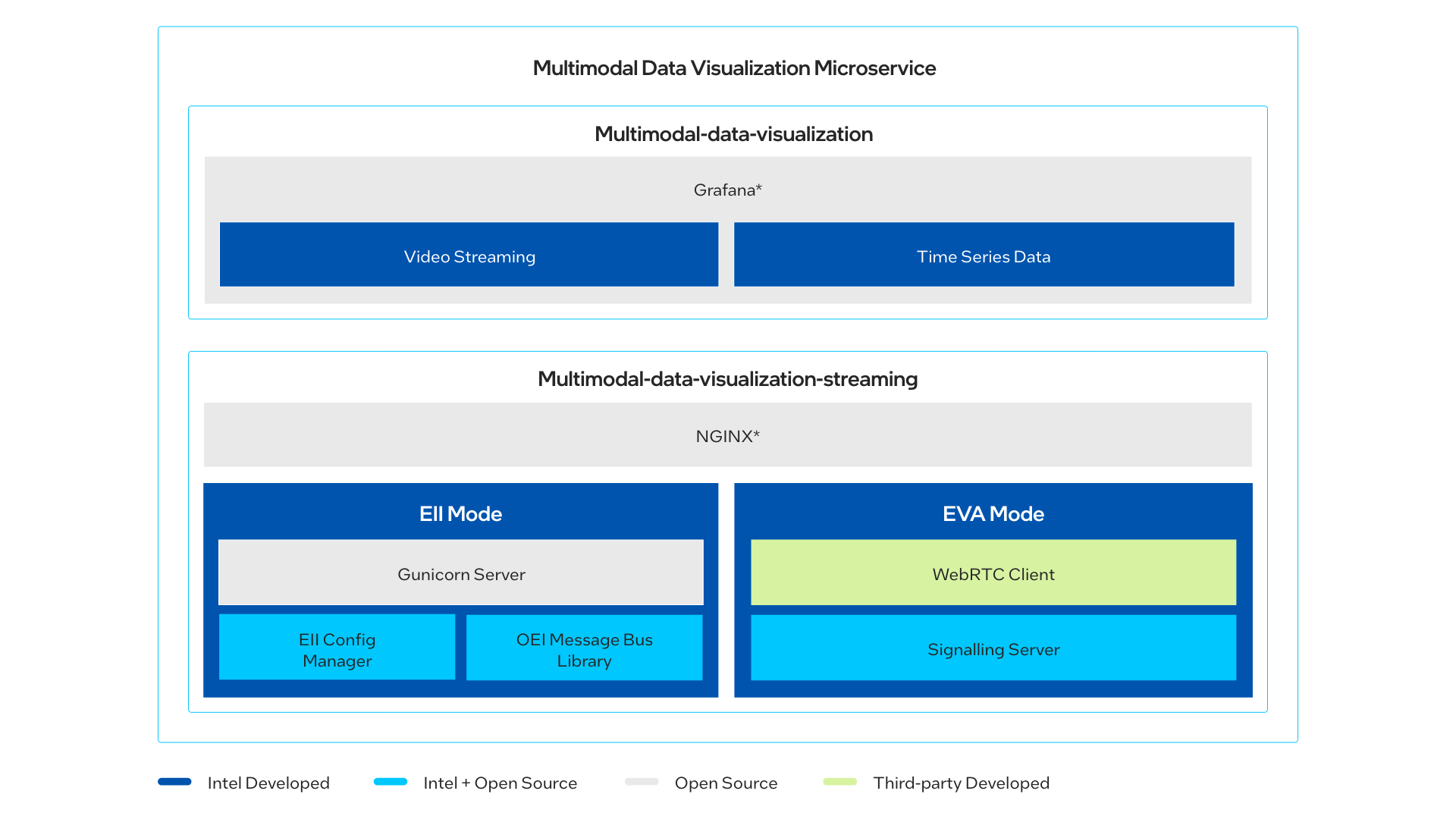 Figure 1: Architecture Diagram
Figure 1: Architecture Diagram
利用環(huán)境變量,多式數(shù)據(jù)可視化微觀服務(wù)可按以下三種模式部署:
獨(dú)立模式(使用 HTTP 接收視頻框)
EVA 模式(使用 WebRTC 接收視頻框)
EII 模式(使用 OEI 消息程序接收視頻框)
在獨(dú)立模式下,可視化微觀服務(wù)通過(guò)HTTP接收視頻流,并在格拉法納儀表板上顯示。
在EVA模式下,WebRTC框架用于從邊緣視頻分析微觀服務(wù)等微服務(wù)中獲取經(jīng)過(guò)處理的視頻,并將其流到網(wǎng)頁(yè)上。邊緣視頻分析微觀服務(wù)將推斷結(jié)果,如物體探測(cè)盒捆綁在視頻框上等結(jié)果發(fā)送到視頻框中。在這一模式下,可視化微觀服務(wù)還展示了視頻分析指標(biāo),如管道狀況和通過(guò)向視頻分析微觀服務(wù)發(fā)送 REST 請(qǐng)求獲得的性能。
在EII模式下,可視化微觀服務(wù)訂閱OEI信息布線,以接收視頻框和推斷結(jié)果,并在覆蓋推斷結(jié)果后將視頻傳送到網(wǎng)頁(yè),例如視頻框上的物體探測(cè)捆綁框。在這種模式下,可視化微觀服務(wù)還顯示時(shí)間序列顯示儀表板,以可視化從EII信息布線上收到的時(shí)間序列數(shù)據(jù)。
可視化微服務(wù)使開發(fā)者能夠指定配置。
開始
第1步:配置您的環(huán)境
確保所有所需經(jīng)費(fèi)所需資源與Ubuntu* 約見。
步驟2:安裝微觀服務(wù)
選定配置 下載下載微服務(wù),然后按以下步驟安裝。
配置 下載
打開一個(gè)新的終端, 轉(zhuǎn)到下載的文件夾并解zip 下載的軟件包 :
unzip multimodal_data_visualization.zip
轉(zhuǎn)到multimodal_data_visualization/目錄 :
cd multimodal_data_visualization
更改可執(zhí)行的邊緣軟件文件的權(quán)限 :
chmod 755 edgesoftware
在下面運(yùn)行安裝微服務(wù)的命令 :
sudo ./edgesoftware install
安裝期間,您將被提示產(chǎn)品鍵。產(chǎn)品鍵包含在Intel發(fā)來(lái)的郵件中,該郵件確認(rèn)您的下載。
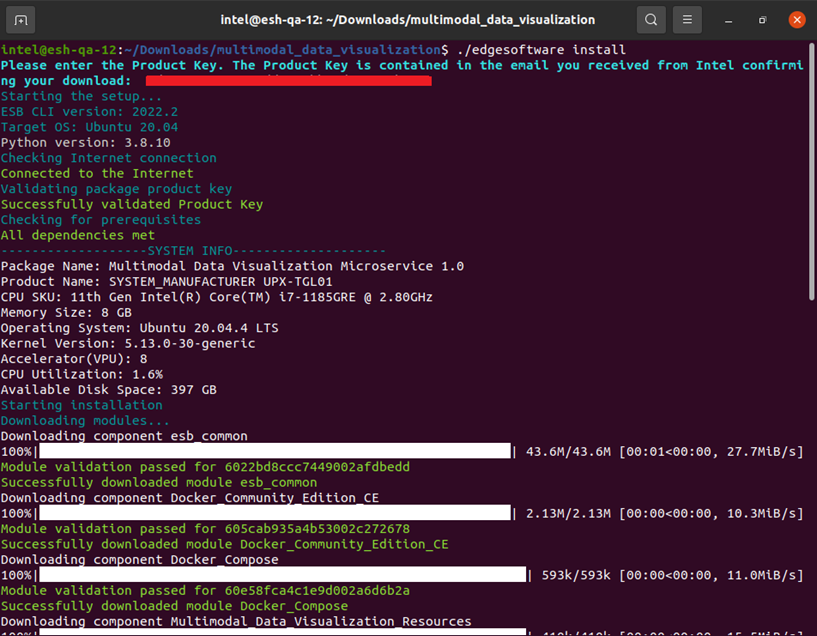 Figure 2: 產(chǎn)品鍵
Figure 2: 產(chǎn)品鍵
安裝完成后,您可以看到“包件完整安裝”的信息和每個(gè)模塊的安裝狀態(tài)。
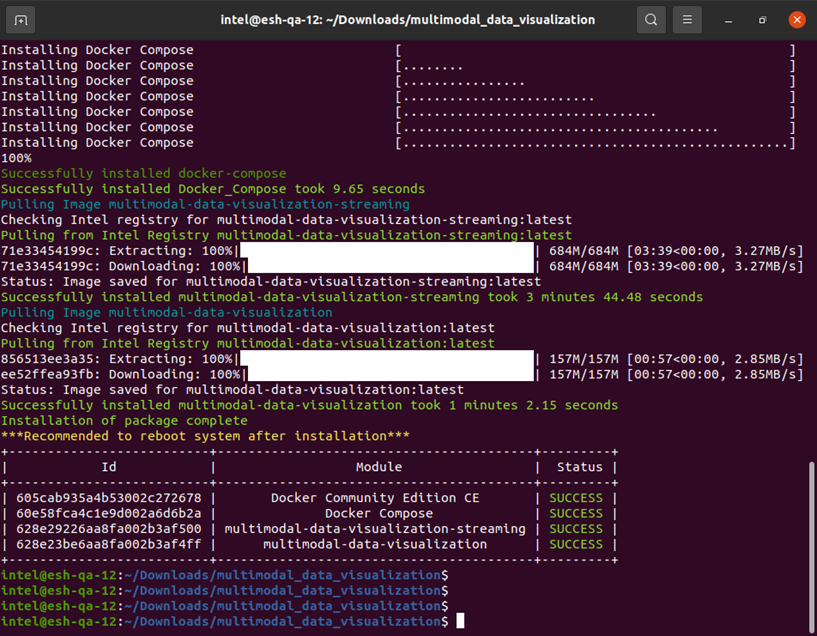 Figure 3: Installation Complete
Figure 3: Installation Complete
第3步:核查安裝
成功安裝的檢查 :
所有安裝的模塊都應(yīng)顯示成功成功狀態(tài)。
以下圖像應(yīng)可在本地本地獲取 。 (使用命令檢查圖像)docker images) )
多式聯(lián)運(yùn)數(shù)據(jù)可視化
多式聯(lián)運(yùn)數(shù)據(jù)-可視化-流
路徑路徑路徑路徑路徑multimodal_data_visualization/Multimodal_Data_Visualization_Microservice_/Multimodal_Data_Visualization_Resources/可用于運(yùn)行多式數(shù)據(jù)可視化微服務(wù)。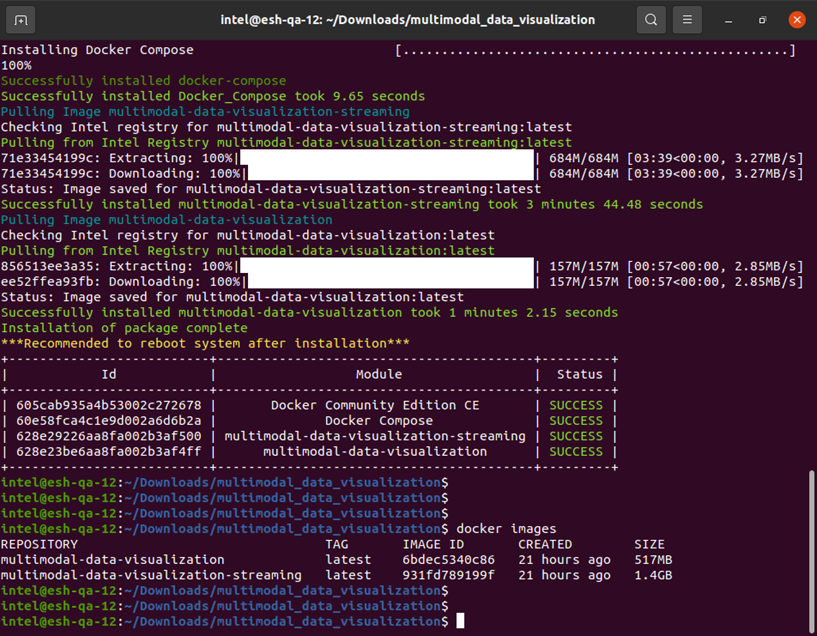 Figure 4: 成功成功ful Install Verified
Figure 4: 成功成功ful Install Verified
教腳
教程1:以獨(dú)立模式運(yùn)行多模式數(shù)據(jù)可視化微觀服務(wù)
導(dǎo)航至Multimodal_Data_Visualization_Microservice_/Multimodal_Data_Visualization_Resources/目錄。
注:默認(rèn)情況下,多式數(shù)據(jù)可視化微服務(wù)將配置為獨(dú)立模式。
運(yùn)行 docker 合成命令 :docker-compose up
轉(zhuǎn)到http://localhost:30:3000進(jìn)入格拉法納。
上家 家頭板頁(yè)面,單擊儀表板儀表板圖標(biāo)。
單擊管理儀表板選項(xiàng)卡以查看所有預(yù)先配置的儀表板列表。
點(diǎn)擊點(diǎn)擊可視化儀Google* API將提供視頻樣本, 因此Grafana儀表板將裝上視頻。 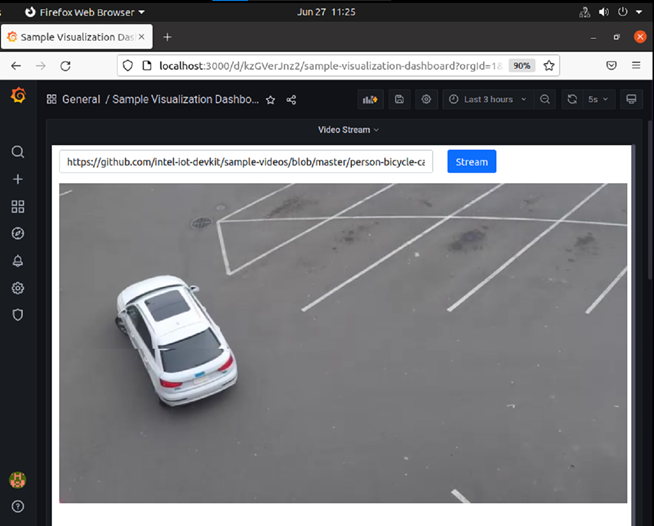 Figure 5: 可視化儀
Figure 5: 可視化儀
注:以不同的視頻流出, 將視頻 url 替換為另一視頻 url 并點(diǎn)擊溪流按鈕。
教程2:運(yùn)行以 EVA 模式提供的多模式數(shù)據(jù)可視化微觀服務(wù)
以下步驟詳細(xì)說(shuō)明了如何運(yùn)行多式聯(lián)運(yùn)數(shù)據(jù)可視化微觀服務(wù)以及邊緣視頻分析.
邊緣視頻分析微觀服務(wù)公司執(zhí)行一個(gè)視頻分析管道,它為發(fā)現(xiàn)、啟動(dòng)、停止、定制和監(jiān)測(cè)管道執(zhí)行提供了免費(fèi)的API。 多式聯(lián)運(yùn)數(shù)據(jù)視覺化微觀服務(wù)公司利用管道處理的數(shù)據(jù)在格拉法納儀表板上顯示。
步驟1:配置 EVA 模式的客戶瀏覽器
Mozilla Firefox * : 通過(guò)導(dǎo)航指定設(shè)置大約: config:
確認(rèn)啟用了. emer connectation.設(shè)置為真實(shí)。這是默認(rèn)指定的。
確認(rèn)介質(zhì). peer connection.ice.obfuscate_host_地址設(shè)置為假。這樣就可以在 http://localhost 上成功操作 。
第一次導(dǎo)航到網(wǎng)站時(shí),單擊瀏覽器地址欄左側(cè)的屏蔽,關(guān)閉強(qiáng)化跟蹤保護(hù)系統(tǒng)。
步驟2:下載和安裝軟件包邊緣視頻分析
下載微服務(wù):單擊單擊自定義下載選項(xiàng)和選擇邊緣視頻分析與運(yùn)行多式數(shù)據(jù)可視化下載軟件包時(shí)的服務(wù) 。 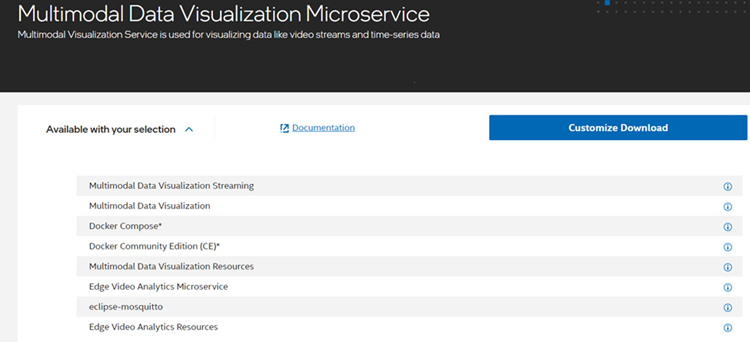 Figure 6: 自定義下載
Figure 6: 自定義下載
安裝 :續(xù) 續(xù)Get Started: Install the Microservice這將安裝兩種微服務(wù)。 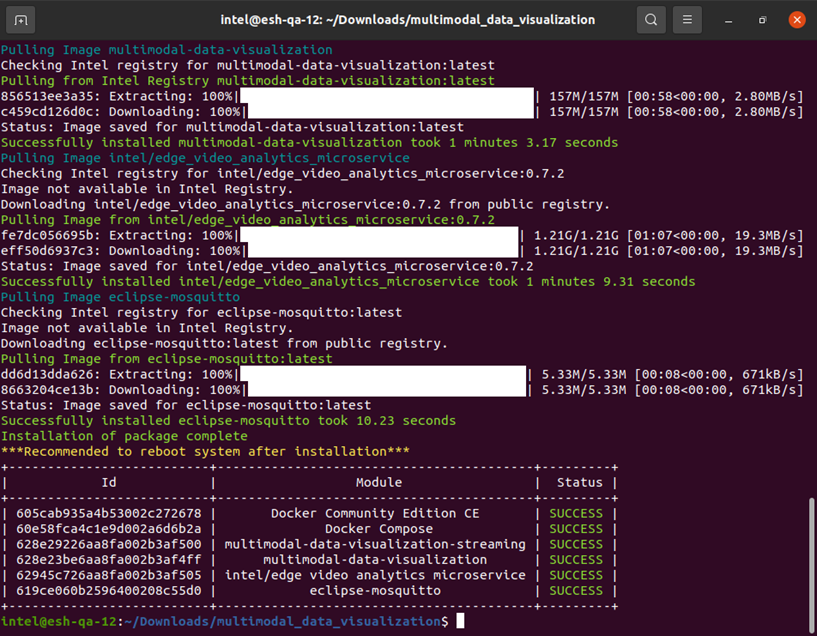 Figure 7: 成功成功ful Installation
Figure 7: 成功成功ful Installation
校驗(yàn)安裝 :列出使用以下命令下載的 docker 圖像 :docker images 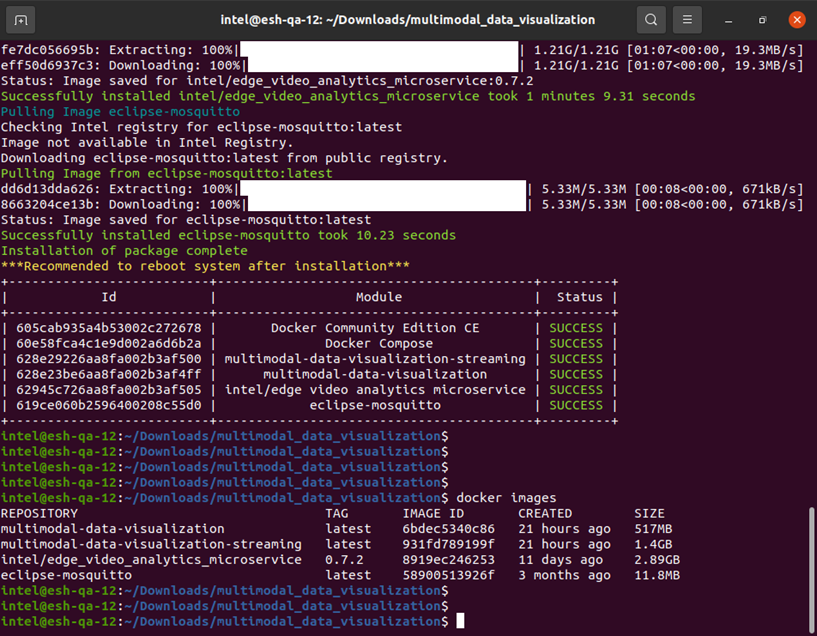 Figure 8: Docker Images Download
Figure 8: Docker Images Download
步驟3:把集裝箱裝上集裝箱
“邊緣視頻分析微觀服務(wù)”需要深層學(xué)習(xí)模型來(lái)運(yùn)行視頻分析管道。
轉(zhuǎn)到安裝軟件包后創(chuàng)建的工作目錄, 并添加文件權(quán)限來(lái)運(yùn)行腳本 。
cd Edge_Video_Analytics_Resources/ sudo chmod +x docker/run.sh sudo chmod +x tools/model_downloader/model_downloader.sh
運(yùn)行以下命令, 從工作目錄中的 Open Model Zoo 下載所需的模型 :
sudo ./tools/model_downloader/model_downloader.sh --model-list 模型_列表/模型.list.yml
打開時(shí)查看模型列表模型_列表/模型.list.yml文件。
通過(guò)瀏覽模式目錄,檢查下載成功與否 。 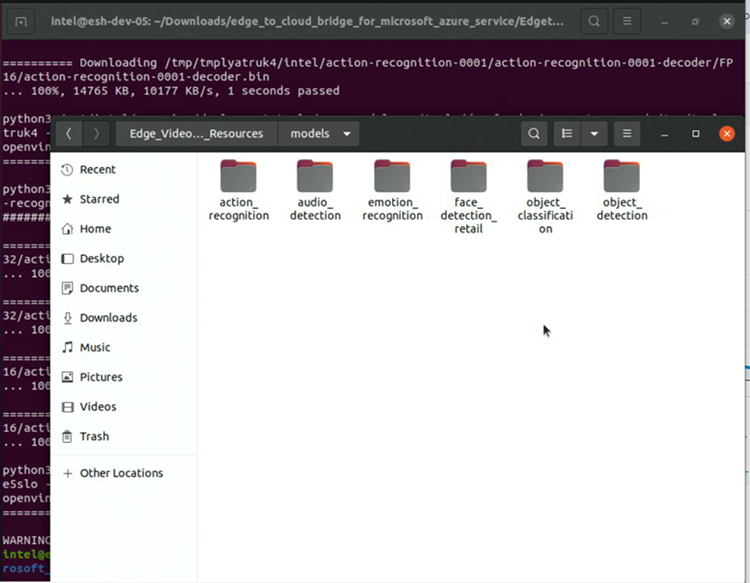 Figure 9: Models Directory
Figure 9: Models Directory
導(dǎo)航至Multimodal_Data_Visualization_Microservice_/Multimodal_Data_Visualization_Resources目錄 :
cd ../Multimodal_Data_Visualization_Resources/
配置主機(jī) IP :
export HOST_IP=xxx.xxx.xx.xxx
運(yùn)行運(yùn)行docker-compose upEVA 模式命令 :
docker-compose -f docker-compose-eva.yml up
打開一個(gè)新的終端并檢查集裝箱正在運(yùn)行:
docker ps --format 'table{{.Image}}t{{.Status}}t{{.Names}}'
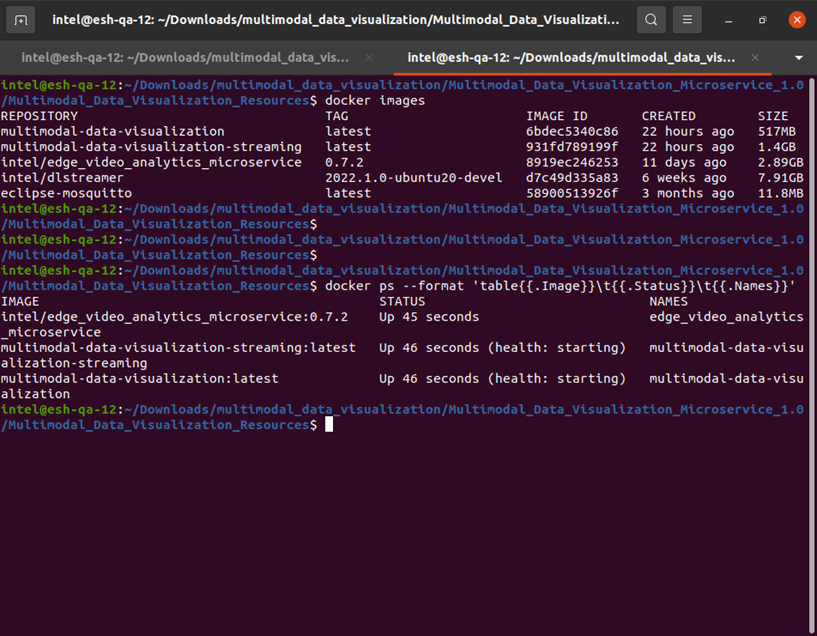 Figure 10: Container Status
Figure 10: Container Status
步驟4:以 EVA 模式運(yùn)行格拉法納
轉(zhuǎn)到http://localhost:30:3000進(jìn)入格拉法納。
上家 家 儀表板左轉(zhuǎn)角的頁(yè)面,單擊管理儀表板選項(xiàng)卡以查看所有預(yù)先配置的儀表板列表。
選定管道服務(wù)器樣板查看邊緣視頻分析微觀服務(wù)的數(shù)據(jù)。
如果沒有管道在運(yùn)行,格拉法納儀表板上就會(huì)顯示“目前沒有管道在運(yùn)行”。 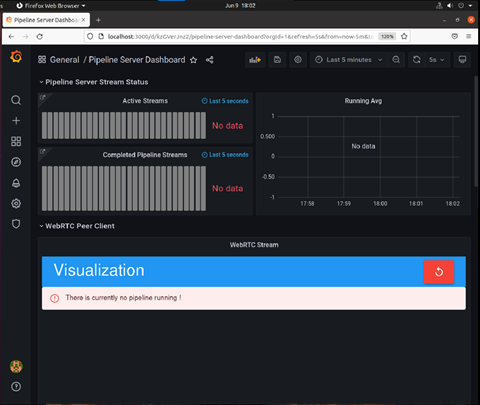 Figure 11: Pipeline Status
Figure 11: Pipeline Status
打開一個(gè)新的終端 。
使用 curl API 發(fā)送 REST 請(qǐng)求, 運(yùn)行物體探測(cè)管道 :
curl localhost:8080/pipelines/object_detection/person_vehicle_bike -X POST -H 'Content-Type: application/json' -d '{ "source": { "uri": "https://github.com/intel-iot-devkit/sample-videos/blob/master/person-bicycle-car-detection.mp4?raw=真實(shí)", "type": "uri" }, "destination": { "metadata": { "type": "file", "format": "json-lines", "path": "/tmp/results.jsonl" }, "frame": { "type": "webrtc", "對(duì)等對(duì)等點(diǎn)": "peer_test_1" } }, “parameters”:{ “detection-device”: “CPU” } }'
對(duì)于 PRC 用戶, 請(qǐng)使用以下命令 :
curl localhost:8080/pipelines/object_detection/person_vehicle_bike -X POST -H
'Content-Type: application/json' -d
'{
"source": {
"uri": " https://ghproxy.com/github.com/intel-iot-devkit/sample-videos/blob/master/person-bicycle-car-detection.mp4?raw=真實(shí)",
"type": "uri"
},
"destination": {
"metadata": {
"type": "file",
"format": "json-lines",
"path": "/tmp/results.jsonl"
},
"frame": {
"type": "webrtc",
"對(duì)等對(duì)等點(diǎn)": "peer_test_1"
}
},
“parameters”:{
“detection-device”: “CPU”
}
}'
注:通過(guò)為目的地同儕身份證明提供一個(gè)獨(dú)特的價(jià)值,可以同時(shí)發(fā)送多個(gè)管道請(qǐng)求(見A/CN.9/WG.III/WP.39)。對(duì)等對(duì)等點(diǎn)每次請(qǐng)求啟動(dòng)新管道時(shí)都要這樣做。
一旦管道開始運(yùn)行狀態(tài), 將導(dǎo)航到格拉法納儀表板上, 以可視化流。 點(diǎn)擊刷新在面板上為正在運(yùn)行的輸油管獲取視頻流。 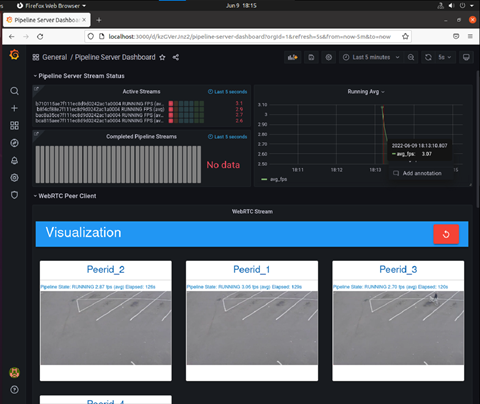 Figure 12: Video 溪流ing
Figure 12: Video 溪流ing
一旦所有管道的狀態(tài)改為已完成,將停止以下圖像顯示的視頻流。 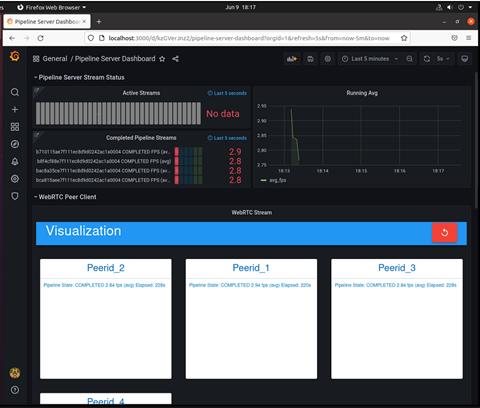 Figure 13: Video 溪流ing Stopped
Figure 13: Video 溪流ing Stopped
單擊單擊刷新再次提出新的輸油管請(qǐng)求,或?qū)⒁淹瓿傻妮斢凸軓男〗M中拆除。 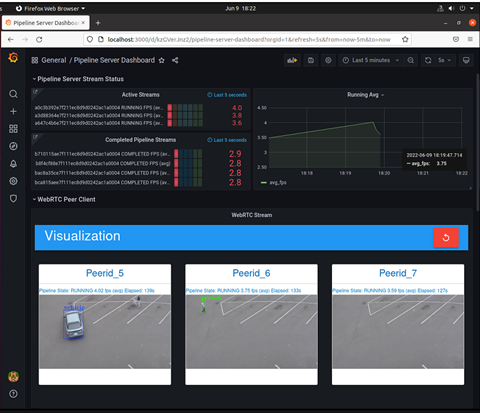 Figure 14: 刷新ed Video Screen
Figure 14: 刷新ed Video Screen
教學(xué)圖3:安裝多式數(shù)據(jù)可視化螺旋* 圖表
注:此教程假設(shè)您有一個(gè) Kubernetes 群集可用 。
在此教程中, 您將使用 Helm 圖表在 Kubernetes 群集中安裝多式數(shù)據(jù)可視化微服務(wù)。 多式數(shù)據(jù)可視化和多式數(shù)據(jù)可視化流的 Helm 圖表包用于樣本部署 。
此教程解釋如何在 EVA 模式和獨(dú)立模式中使用多模式數(shù)據(jù)可視化 Helm 圖表。 您必須完成兩種模式的教學(xué)預(yù)設(shè)條件 。
教學(xué)預(yù)設(shè)條件
完整步驟1和2Get Started區(qū)域。要下載 Helm 圖表,您必須選擇自定義下載選項(xiàng)內(nèi)配置 下載步驟。
安裝完成后,您可以看到信息“軟件包完整整合”和每個(gè)模塊的安裝狀態(tài)。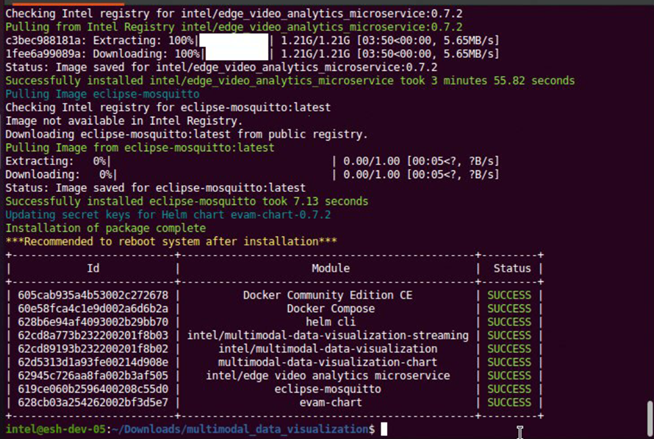 Figure 15: 成功成功ful Installation including Helm Charts
Figure 15: 成功成功ful Installation including Helm Charts
添加系統(tǒng)的主 IP 地址values.yamlEVAM Helm 圖表文件夾的文件 。
添加系統(tǒng)的主 IP 地址values.yaml多式數(shù)據(jù)可視化 Helm 圖表文件夾文件。
以 EVA 模式顯示的多模式數(shù)據(jù)可視化 Helm 圖表
輸入命令 :
helm install 多式聯(lián)運(yùn)數(shù)據(jù)可視化./multimodal-data-visualization-chart-3.0/
您將會(huì)看到類似 :
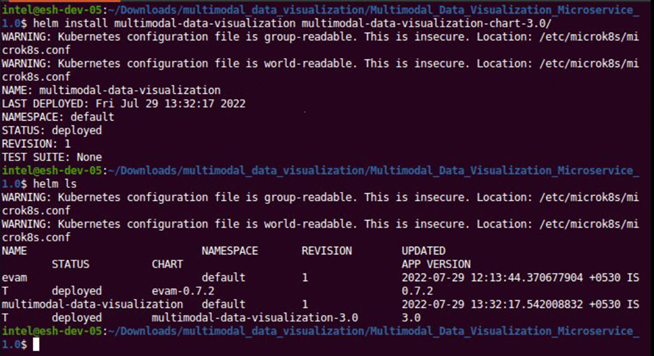 Figure 16: Run Helm Chart
Figure 16: Run Helm Chart
Get the IP IP 地址 :
kubectl get pods -o wide
您將會(huì)看到類似 :
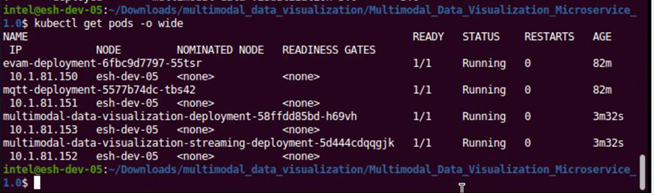 Figure 17: Pod Status after Helm Chart Installation
Figure 17: Pod Status after Helm Chart Installation
轉(zhuǎn)到http://:30000至access Multimodal-Data-Visualization.
注:與格拉法納連接可能需要一些時(shí)間(最多2分鐘),
上家 家 儀表板左角左轉(zhuǎn)角的頁(yè)面上單擊儀表板儀表板圖標(biāo)。
單擊管理儀表板選項(xiàng)卡,以查看所有預(yù)先配置的儀表板列表。
選定視頻分析儀表板查看邊緣視頻分析微觀服務(wù)的數(shù)據(jù)。
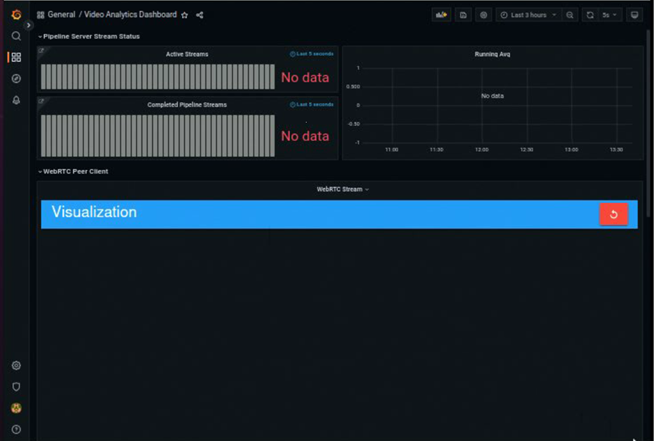 Figure 18: 視頻分析儀表板 before pipeline is triggered
Figure 18: 視頻分析儀表板 before pipeline is triggered
發(fā)送輸油管請(qǐng)求指令,以觸發(fā)輸油管流,并使用命令在儀表板上發(fā)布FPS結(jié)果:
curl localhost:30007/pipelines/object_detection/person_vehicle_bike -X POST -H
'Content-Type: application/json' -d
'{
"source": {
"uri": "https://github.com/intel-iot-devkit/sample-videos/blob/master/person-bicycle-car-detection.mp4?raw=真實(shí)",
"type": "uri"
},
"destination": {
"metadata": {
"type": "file",
"format": "json-lines",
"path": "/tmp/results.jsonl"
},
"frame": {
"type": "webrtc",
"對(duì)等對(duì)等點(diǎn)": "peer_test_1"
}
},
“parameters”:{
“detection-device”: “CPU”
}
}'
注:對(duì)于項(xiàng)目審查委員會(huì)的用戶,將編審中請(qǐng)求URI改為:https://ghproxy.com/https://github.com/intel-iot-devkit/sample-views/blob/master/person-bicyccy-car-detraction.mp4?raw=reaty=reaut=真,https://ghproxy.com/https://github.com/intel-iot-devkit/sample-views/blob/master/person/person-bicycly-car-detraction..
單擊刷新按鈕上的 WebRTC 流面板可獲取運(yùn)行管道的流。
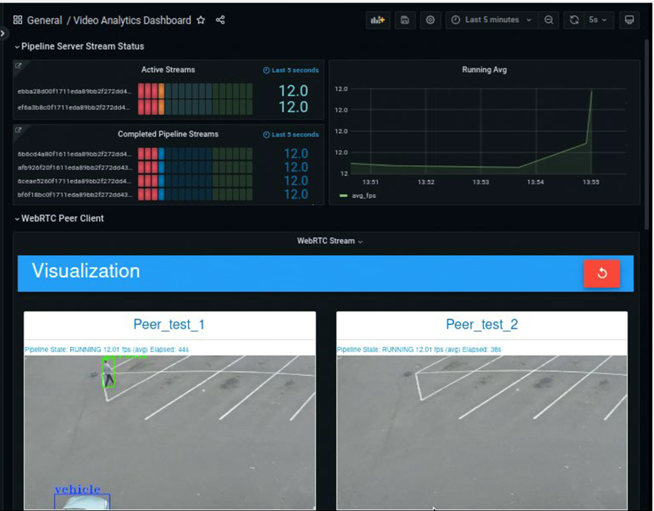 Figure 19: 視頻分析儀表板 showing streaming for the running pipelines
Figure 19: 視頻分析儀表板 showing streaming for the running pipelines
獨(dú)立模式的多模式數(shù)據(jù)可視化 Helm 圖表
添加系統(tǒng)的主 IP 地址values.yaml文件,它位于多式數(shù)據(jù)可視化引導(dǎo)圖表文件夾中。
設(shè)定環(huán)境變量 MODE 為空values.yaml位于多式數(shù)據(jù)虛擬化文件夾, 在哪里是下載的軟件版本。
MODE:
用命令安裝 Helm 圖表 :
helm install 多式聯(lián)運(yùn)數(shù)據(jù)可視化./multimodal-data-visualization-chart-3.0/
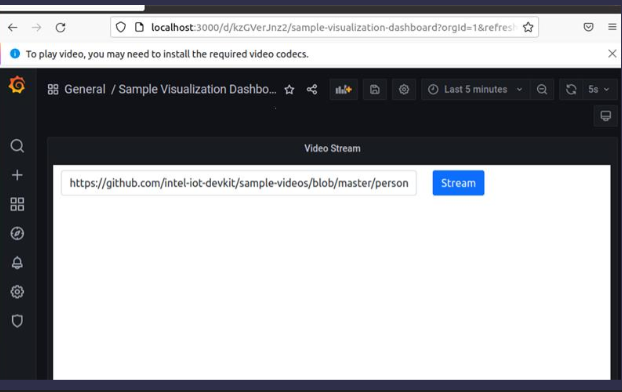
轉(zhuǎn)到http://:30000至access Multimodal-Data-Visualization.
注:與格拉法納連接可能需要一些時(shí)間(最多2分鐘),
要查看格拉法納儀表板上的視頻樣本流,請(qǐng)選擇可視化儀.
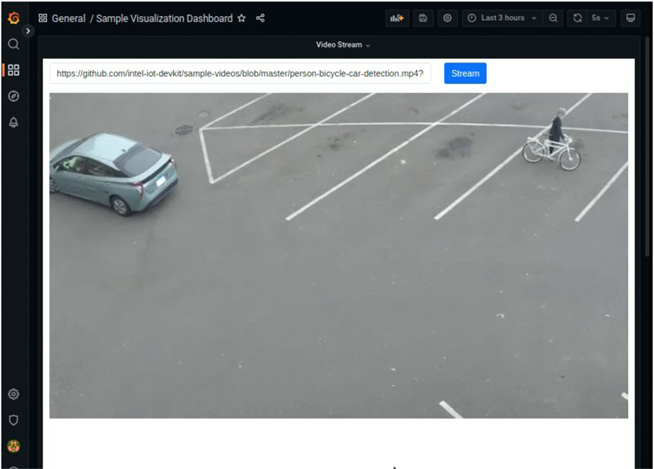 Figure 20: 可視化儀
Figure 20: 可視化儀
概述和下一步步驟
你學(xué)習(xí)如何使用格拉法納儀表板將視頻分析和時(shí)間序列分析數(shù)據(jù)視覺化。
使用Edge Video Alytics Microservice(Edge Video Avictics Microservice),
下一步,請(qǐng)參見“學(xué)習(xí)更多”中的項(xiàng)目,以繼續(xù)你的學(xué)習(xí)歷程。
學(xué)習(xí)更多
繼續(xù)學(xué)習(xí),見下列指南和軟件資源:
GitHub*
嵌入樞紐 :
multimodal-data-visualization
multimodal-data-visualization-streaming
邊緣視頻分析
開放邊緣透視 for Industrial
排除故障
如果Grafana沒有顯示流, 請(qǐng)務(wù)必更新 Firefox* 設(shè)置, 內(nèi)容為 :config -> 介質(zhì). peer connection.ice.obfuscate_host_地址至假.
如果視頻沒有在瀏覽器上流, 并且顯示安裝視頻編碼器的錯(cuò)誤, 然后通過(guò)終端安裝下面的軟件包并重新啟動(dòng)瀏覽器 。
sudo apt-get install ffmpeg
如果用 FPS 顯示的“ RUNNINING” 狀態(tài)管道瀏覽器上看不到流流, 那么在運(yùn)行容器前確保 HOST_ IP 被導(dǎo)出 。
export HOST_IP=xxx.xxx.xx.xxx
支助論壇支助論壇
若您無(wú)法解決問(wèn)題,請(qǐng)聯(lián)系支助論壇支助論壇.?
你負(fù)責(zé)支付所有第三方費(fèi)用,包括支付使用微軟Azure服務(wù)的費(fèi)用。
關(guān)于微微子亞速產(chǎn)品的最新信息,見微軟亞速產(chǎn)品的最新信息。網(wǎng)站網(wǎng)站.
概覽概覽
通過(guò)Grafana* 儀表板將視頻分析和時(shí)間序列分析數(shù)據(jù)視覺化成視頻分析和時(shí)間序列分析數(shù)據(jù)。開放邊緣透視(OEI) 信息總線、 WebRTC* 或 HTTP 協(xié)議, 并使用儀表板顯示, 在同一儀表板中同時(shí)流多個(gè)視頻。 它還可以訂閱 OEI 信息總線來(lái)接收格拉法納儀表板上的時(shí)間序列分析數(shù)據(jù) 。
多模式數(shù)據(jù)可視化微觀服務(wù)可與邊緣視頻分析微觀服務(wù)獨(dú)立使用,也可與工業(yè)(EII)微觀服務(wù)生態(tài)系統(tǒng)的邊緣透視獨(dú)立使用。
選定配置 下載下載微觀服務(wù)和下列軟件。
配置 下載
完成時(shí)間 :15分鐘15分鐘
語(yǔ)言:Python* 3
可用軟件 :邊緣視頻分析
目標(biāo)系統(tǒng)要求
下列處理器之一:
英特爾第6至11代核心提款機(jī)處理器
第一至第三代英特爾Xeon可縮放處理器
Intel Atom處理器,帶有Intel流SIMD 擴(kuò)展4.2(Intel SSE4.2)
至少8GB內(nèi)存。
至少64GB硬盤。
互聯(lián)網(wǎng)連接。
Ubuntu* 20.04 LTS Kernel 5.4*
使用Kernel 5.8 用于第11代 Intel CoreTM 處理器。
如何運(yùn)作
多式聯(lián)運(yùn)數(shù)據(jù)可視化微觀服務(wù)由作為Docker集裝箱圖像包裝的兩個(gè)部件組成:
多式聯(lián)運(yùn)數(shù)據(jù)-可視化-流
多式聯(lián)運(yùn)數(shù)據(jù)可視化
通過(guò)HTTP、WebRTC或OEI OEI 消息管道使用Grafana* 的多式聯(lián)運(yùn)數(shù)據(jù)可視化容器將網(wǎng)頁(yè)嵌入格拉法納儀表板,使用AJAX面板將視頻流嵌入Dashboard。它可以在同一 Grafana儀表板上顯示多個(gè)視頻。此外,除了視頻外,它還可以顯示與視頻分析和時(shí)間序列分析有關(guān)的度量。
當(dāng)多式聯(lián)運(yùn)-數(shù)據(jù)-可視化集裝箱開始使用時(shí),它根據(jù)所選的虛擬化微觀服務(wù)模式在格拉法納裝載一個(gè)儀表板配置,多式聯(lián)運(yùn)-數(shù)據(jù)-可視化部分使用格拉法納服務(wù),該服務(wù)暴露了格拉法納3000港的格拉法納網(wǎng)絡(luò)界面。
Figure 1: Architecture Diagram
利用環(huán)境變量,多式數(shù)據(jù)可視化微觀服務(wù)可按以下三種模式部署:
獨(dú)立模式(使用 HTTP 接收視頻框)
EVA 模式(使用 WebRTC 接收視頻框)
EII 模式(使用 OEI 消息程序接收視頻框)
在獨(dú)立模式下,可視化微觀服務(wù)通過(guò)HTTP接收視頻流,并在格拉法納儀表板上顯示。
在EVA模式下,WebRTC框架用于從邊緣視頻分析微觀服務(wù)等微服務(wù)中獲取經(jīng)過(guò)處理的視頻,并將其流到網(wǎng)頁(yè)上。邊緣視頻分析微觀服務(wù)將推斷結(jié)果,如物體探測(cè)盒捆綁在視頻框上等結(jié)果發(fā)送到視頻框中。在這一模式下,可視化微觀服務(wù)還展示了視頻分析指標(biāo),如管道狀況和通過(guò)向視頻分析微觀服務(wù)發(fā)送 REST 請(qǐng)求獲得的性能。
在EII模式下,可視化微觀服務(wù)訂閱OEI信息布線,以接收視頻框和推斷結(jié)果,并在覆蓋推斷結(jié)果后將視頻傳送到網(wǎng)頁(yè),例如視頻框上的物體探測(cè)捆綁框。在這種模式下,可視化微觀服務(wù)還顯示時(shí)間序列顯示儀表板,以可視化從EII信息布線上收到的時(shí)間序列數(shù)據(jù)。
可視化微服務(wù)使開發(fā)者能夠指定配置。
開始
第1步:配置您的環(huán)境
確保所有所需經(jīng)費(fèi)所需資源與Ubuntu* 約見。
步驟2:安裝微觀服務(wù)
選定配置 下載下載微服務(wù),然后按以下步驟安裝。
配置 下載
打開一個(gè)新的終端, 轉(zhuǎn)到下載的文件夾并解zip 下載的軟件包 :
unzip multimodal_data_visualization.zip
轉(zhuǎn)到multimodal_data_visualization/目錄 :
cd multimodal_data_visualization
更改可執(zhí)行的邊緣軟件文件的權(quán)限 :
chmod 755 edgesoftware
在下面運(yùn)行安裝微服務(wù)的命令 :
sudo ./edgesoftware install
安裝期間,您將被提示產(chǎn)品鍵。產(chǎn)品鍵包含在Intel發(fā)來(lái)的郵件中,該郵件確認(rèn)您的下載。
Figure 2: 產(chǎn)品鍵
安裝完成后,您可以看到“包件完整安裝”的信息和每個(gè)模塊的安裝狀態(tài)。
Figure 3: Installation Complete
第3步:核查安裝
成功安裝的檢查 :
所有安裝的模塊都應(yīng)顯示成功成功狀態(tài)。
以下圖像應(yīng)可在本地本地獲取 。 (使用命令檢查圖像)docker images) )
多式聯(lián)運(yùn)數(shù)據(jù)可視化
多式聯(lián)運(yùn)數(shù)據(jù)-可視化-流
路徑路徑路徑路徑路徑multimodal_data_visualization/Multimodal_Data_Visualization_Microservice_/Multimodal_Data_Visualization_Resources/可用于運(yùn)行多式數(shù)據(jù)可視化微服務(wù)。 Figure 4: 成功成功ful Install Verified
教腳
教程1:以獨(dú)立模式運(yùn)行多模式數(shù)據(jù)可視化微觀服務(wù)
導(dǎo)航至Multimodal_Data_Visualization_Microservice_/Multimodal_Data_Visualization_Resources/目錄。
注:默認(rèn)情況下,多式數(shù)據(jù)可視化微服務(wù)將配置為獨(dú)立模式。
運(yùn)行 docker 合成命令 :docker-compose up
轉(zhuǎn)到http://localhost:30:3000進(jìn)入格拉法納。
上家 家頭板頁(yè)面,單擊儀表板儀表板圖標(biāo)。
單擊管理儀表板選項(xiàng)卡以查看所有預(yù)先配置的儀表板列表。
點(diǎn)擊點(diǎn)擊可視化儀Google* API將提供視頻樣本, 因此Grafana儀表板將裝上視頻。 Figure 5: 可視化儀
注:以不同的視頻流出, 將視頻 url 替換為另一視頻 url 并點(diǎn)擊溪流按鈕。
教程2:運(yùn)行以 EVA 模式提供的多模式數(shù)據(jù)可視化微觀服務(wù)
以下步驟詳細(xì)說(shuō)明了如何運(yùn)行多式聯(lián)運(yùn)數(shù)據(jù)可視化微觀服務(wù)以及邊緣視頻分析.
邊緣視頻分析微觀服務(wù)公司執(zhí)行一個(gè)視頻分析管道,它為發(fā)現(xiàn)、啟動(dòng)、停止、定制和監(jiān)測(cè)管道執(zhí)行提供了免費(fèi)的API。 多式聯(lián)運(yùn)數(shù)據(jù)視覺化微觀服務(wù)公司利用管道處理的數(shù)據(jù)在格拉法納儀表板上顯示。
步驟1:配置 EVA 模式的客戶瀏覽器
Mozilla Firefox * : 通過(guò)導(dǎo)航指定設(shè)置大約: config:
確認(rèn)啟用了. emer connectation.設(shè)置為真實(shí)。這是默認(rèn)指定的。
確認(rèn)介質(zhì). peer connection.ice.obfuscate_host_地址設(shè)置為假。這樣就可以在 http://localhost 上成功操作 。
第一次導(dǎo)航到網(wǎng)站時(shí),單擊瀏覽器地址欄左側(cè)的屏蔽,關(guān)閉強(qiáng)化跟蹤保護(hù)系統(tǒng)。
步驟2:下載和安裝軟件包邊緣視頻分析
下載微服務(wù):單擊單擊自定義下載選項(xiàng)和選擇邊緣視頻分析與運(yùn)行多式數(shù)據(jù)可視化下載軟件包時(shí)的服務(wù) 。 Figure 6: 自定義下載
安裝 :續(xù) 續(xù)Get Started: Install the Microservice這將安裝兩種微服務(wù)。 Figure 7: 成功成功ful Installation
校驗(yàn)安裝 :列出使用以下命令下載的 docker 圖像 :docker images Figure 8: Docker Images Download
步驟3:把集裝箱裝上集裝箱
“邊緣視頻分析微觀服務(wù)”需要深層學(xué)習(xí)模型來(lái)運(yùn)行視頻分析管道。
轉(zhuǎn)到安裝軟件包后創(chuàng)建的工作目錄, 并添加文件權(quán)限來(lái)運(yùn)行腳本 。
cd Edge_Video_Analytics_Resources/ sudo chmod +x docker/run.sh sudo chmod +x tools/model_downloader/model_downloader.sh
運(yùn)行以下命令, 從工作目錄中的 Open Model Zoo 下載所需的模型 :
sudo ./tools/model_downloader/model_downloader.sh --model-list 模型_列表/模型.list.yml
打開時(shí)查看模型列表模型_列表/模型.list.yml文件。
通過(guò)瀏覽模式目錄,檢查下載成功與否 。 Figure 9: Models Directory
導(dǎo)航至Multimodal_Data_Visualization_Microservice_/Multimodal_Data_Visualization_Resources目錄 :
cd ../Multimodal_Data_Visualization_Resources/
配置主機(jī) IP :
export HOST_IP=xxx.xxx.xx.xxx
運(yùn)行運(yùn)行docker-compose upEVA 模式命令 :
docker-compose -f docker-compose-eva.yml up
打開一個(gè)新的終端并檢查集裝箱正在運(yùn)行:
docker ps --format 'table{{.Image}}t{{.Status}}t{{.Names}}'
Figure 10: Container Status
步驟4:以 EVA 模式運(yùn)行格拉法納
轉(zhuǎn)到http://localhost:30:3000進(jìn)入格拉法納。
上家 家 儀表板左轉(zhuǎn)角的頁(yè)面,單擊管理儀表板選項(xiàng)卡以查看所有預(yù)先配置的儀表板列表。
選定管道服務(wù)器樣板查看邊緣視頻分析微觀服務(wù)的數(shù)據(jù)。
如果沒有管道在運(yùn)行,格拉法納儀表板上就會(huì)顯示“目前沒有管道在運(yùn)行”。 Figure 11: Pipeline Status
打開一個(gè)新的終端 。
使用 curl API 發(fā)送 REST 請(qǐng)求, 運(yùn)行物體探測(cè)管道 :
curl localhost:8080/pipelines/object_detection/person_vehicle_bike -X POST -H
'Content-Type: application/json' -d
'{
"source": {
"uri": "https://github.com/intel-iot-devkit/sample-videos/blob/master/person-bicycle-car-detection.mp4?raw=真實(shí)",
"type": "uri"
},
"destination": {
"metadata": {
"type": "file",
"format": "json-lines",
"path": "/tmp/results.jsonl"
},
"frame": {
"type": "webrtc",
"對(duì)等對(duì)等點(diǎn)": "peer_test_1"
}
},
“parameters”:{
“detection-device”: “CPU”
}
}'
對(duì)于 PRC 用戶, 請(qǐng)使用以下命令 :
curl localhost:8080/pipelines/object_detection/person_vehicle_bike -X POST -H
'Content-Type: application/json' -d
'{
"source": {
"uri": " https://ghproxy.com/github.com/intel-iot-devkit/sample-videos/blob/master/person-bicycle-car-detection.mp4?raw=真實(shí)",
"type": "uri"
},
"destination": {
"metadata": {
"type": "file",
"format": "json-lines",
"path": "/tmp/results.jsonl"
},
"frame": {
"type": "webrtc",
"對(duì)等對(duì)等點(diǎn)": "peer_test_1"
}
},
“parameters”:{
“detection-device”: “CPU”
}
}'
注:通過(guò)為目的地同儕身份證明提供一個(gè)獨(dú)特的價(jià)值,可以同時(shí)發(fā)送多個(gè)管道請(qǐng)求(見A/CN.9/WG.III/WP.39)。對(duì)等對(duì)等點(diǎn)每次請(qǐng)求啟動(dòng)新管道時(shí)都要這樣做。
一旦管道開始運(yùn)行狀態(tài), 將導(dǎo)航到格拉法納儀表板上, 以可視化流。 點(diǎn)擊刷新在面板上為正在運(yùn)行的輸油管獲取視頻流。 Figure 12: Video 溪流ing
一旦所有管道的狀態(tài)改為已完成,將停止以下圖像顯示的視頻流。 Figure 13: Video 溪流ing Stopped
單擊單擊刷新再次提出新的輸油管請(qǐng)求,或?qū)⒁淹瓿傻妮斢凸軓男〗M中拆除。 Figure 14: 刷新ed Video Screen
教學(xué)圖3:安裝多式數(shù)據(jù)可視化螺旋* 圖表
注:此教程假設(shè)您有一個(gè) Kubernetes 群集可用 。
在此教程中, 您將使用 Helm 圖表在 Kubernetes 群集中安裝多式數(shù)據(jù)可視化微服務(wù)。 多式數(shù)據(jù)可視化和多式數(shù)據(jù)可視化流的 Helm 圖表包用于樣本部署 。
此教程解釋如何在 EVA 模式和獨(dú)立模式中使用多模式數(shù)據(jù)可視化 Helm 圖表。 您必須完成兩種模式的教學(xué)預(yù)設(shè)條件 。
教學(xué)預(yù)設(shè)條件
完整步驟1和2Get Started區(qū)域。要下載 Helm 圖表,您必須選擇自定義下載選項(xiàng)內(nèi)配置 下載步驟。
安裝完成后,您可以看到信息“軟件包完整整合”和每個(gè)模塊的安裝狀態(tài)。 Figure 15: 成功成功ful Installation including Helm Charts
添加系統(tǒng)的主 IP 地址values.yamlEVAM Helm 圖表文件夾的文件 。
添加系統(tǒng)的主 IP 地址values.yaml多式數(shù)據(jù)可視化 Helm 圖表文件夾文件。
以 EVA 模式顯示的多模式數(shù)據(jù)可視化 Helm 圖表
輸入命令 :
helm install 多式聯(lián)運(yùn)數(shù)據(jù)可視化./multimodal-data-visualization-chart-3.0/
您將會(huì)看到類似 :
Figure 16: Run Helm Chart
Get the IP IP 地址 :
kubectl get pods -o wide
您將會(huì)看到類似 :
Figure 17: Pod Status after Helm Chart Installation
轉(zhuǎn)到http://:30000至access Multimodal-Data-Visualization.
注:與格拉法納連接可能需要一些時(shí)間(最多2分鐘),
上家 家 儀表板左角左轉(zhuǎn)角的頁(yè)面上單擊儀表板儀表板圖標(biāo)。
單擊管理儀表板選項(xiàng)卡,以查看所有預(yù)先配置的儀表板列表。
選定視頻分析儀表板查看邊緣視頻分析微觀服務(wù)的數(shù)據(jù)。
Figure 18: 視頻分析儀表板 before pipeline is triggered
發(fā)送輸油管請(qǐng)求指令,以觸發(fā)輸油管流,并使用命令在儀表板上發(fā)布FPS結(jié)果:
curl localhost:30007/pipelines/object_detection/person_vehicle_bike -X POST -H
'Content-Type: application/json' -d
'{
"source": {
"uri": "https://github.com/intel-iot-devkit/sample-videos/blob/master/person-bicycle-car-detection.mp4?raw=真實(shí)",
"type": "uri"
},
"destination": {
"metadata": {
"type": "file",
"format": "json-lines",
"path": "/tmp/results.jsonl"
},
"frame": {
"type": "webrtc",
"對(duì)等對(duì)等點(diǎn)": "peer_test_1"
}
},
“parameters”:{
“detection-device”: “CPU”
}
}'
注:對(duì)于項(xiàng)目審查委員會(huì)的用戶,將編審中請(qǐng)求URI改為:https://ghproxy.com/https://github.com/intel-iot-devkit/sample-views/blob/master/person-bicyccy-car-detraction.mp4?raw=reaty=reaut=真,https://ghproxy.com/https://github.com/intel-iot-devkit/sample-views/blob/master/person/person-bicycly-car-detraction..
單擊刷新按鈕上的 WebRTC 流面板可獲取運(yùn)行管道的流。
Figure 19: 視頻分析儀表板 showing streaming for the running pipelines
獨(dú)立模式的多模式數(shù)據(jù)可視化 Helm 圖表
添加系統(tǒng)的主 IP 地址values.yaml文件,它位于多式數(shù)據(jù)可視化引導(dǎo)圖表文件夾中。
設(shè)定環(huán)境變量 MODE 為空values.yaml位于多式數(shù)據(jù)虛擬化文件夾, 在哪里是下載的軟件版本。
MODE:
用命令安裝 Helm 圖表 :
helm install 多式聯(lián)運(yùn)數(shù)據(jù)可視化./multimodal-data-visualization-chart-3.0/
轉(zhuǎn)到http://:30000至access Multimodal-Data-Visualization.
注:與格拉法納連接可能需要一些時(shí)間(最多2分鐘),
要查看格拉法納儀表板上的視頻樣本流,請(qǐng)選擇可視化儀.
Figure 20: 可視化儀
概述和下一步步驟
你學(xué)習(xí)如何使用格拉法納儀表板將視頻分析和時(shí)間序列分析數(shù)據(jù)視覺化。
使用Edge Video Alytics Microservice(Edge Video Avictics Microservice),
下一步,請(qǐng)參見“學(xué)習(xí)更多”中的項(xiàng)目,以繼續(xù)你的學(xué)習(xí)歷程。
學(xué)習(xí)更多
繼續(xù)學(xué)習(xí),見下列指南和軟件資源:
GitHub*
嵌入樞紐 :
multimodal-data-visualization
multimodal-data-visualization-streaming
邊緣視頻分析
開放邊緣透視 for Industrial
排除故障
如果Grafana沒有顯示流, 請(qǐng)務(wù)必更新 Firefox* 設(shè)置, 內(nèi)容為 :config -> 介質(zhì). peer connection.ice.obfuscate_host_地址至假.
如果視頻沒有在瀏覽器上流, 并且顯示安裝視頻編碼器的錯(cuò)誤, 然后通過(guò)終端安裝下面的軟件包并重新啟動(dòng)瀏覽器 。
sudo apt-get install ffmpeg
如果用 FPS 顯示的“ RUNNINING” 狀態(tài)管道瀏覽器上看不到流流, 那么在運(yùn)行容器前確保 HOST_ IP 被導(dǎo)出 。
export HOST_IP=xxx.xxx.xx.xxx
支助論壇支助論壇
若您無(wú)法解決問(wèn)題,請(qǐng)聯(lián)系支助論壇支助論壇.?
你負(fù)責(zé)支付所有第三方費(fèi)用,包括支付使用微軟Azure服務(wù)的費(fèi)用。
關(guān)于微微子亞速產(chǎn)品的最新信息,見微軟亞速產(chǎn)品的最新信息。網(wǎng)站網(wǎng)站.
審核編輯 黃宇
-
可視化
+關(guān)注
關(guān)注
1文章
1200瀏覽量
21034 -
微觀
+關(guān)注
關(guān)注
0文章
7瀏覽量
8783
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
七款經(jīng)久不衰的數(shù)據(jù)可視化工具!
什么是大屏數(shù)據(jù)可視化?特點(diǎn)有哪些?
如何找到適合的大屏數(shù)據(jù)可視化系統(tǒng)
可視化圖表組件-“雙跨”平臺(tái) BI 數(shù)據(jù)大屏 #數(shù)據(jù)可視化 #可視化圖表 #BI報(bào)表 #駕駛艙
智慧能源可視化監(jiān)管平臺(tái)——助力可視化能源數(shù)據(jù)管理

工業(yè)數(shù)據(jù)可視化管理平臺(tái)是什么
大屏數(shù)據(jù)可視化 開源

態(tài)勢(shì)數(shù)據(jù)可視化技術(shù)有哪些
智慧大屏是如何實(shí)現(xiàn)數(shù)據(jù)可視化的?

大屏數(shù)據(jù)可視化的作用和意義
三維可視化數(shù)據(jù)大屏的設(shè)計(jì)原理和技巧
大屏數(shù)據(jù)可視化是什么?運(yùn)用了什么技術(shù)
智慧城市-可視化,進(jìn)一步提高信息化建設(shè)水平
數(shù)據(jù)可視化:企業(yè)數(shù)字化建設(shè)效果的呈現(xiàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論