 開發者分享:輕松搞起CANFD
開發者分享:輕松搞起CANFD
一、概述
先楫的CANFD外設,有兩個CANFD的IP,其中HPM6700系列,HPM6400系列、HPM6300系列使用的是CAN,包括了經典CAN和CANFD。而HPM6200系列則使用的MCAN系列,同樣也包括了經典CAN和CANFD。兩個CANFD有所差異,hpm_sdk也分為了兩個驅動文件,但基本的操作接口保持一致。
本文闡述HPM6700系列,HPM6400系列、HPM6300系列的CAN,這里就統稱為CAN。MCAN部分后續文章闡述。
先楫的CAN外設功能比較豐富,比如涉及到各種CAN模式、CAN錯誤警告提示、時間戳等等。可以看看手冊CAN特征描述。

本文主要介紹CAN的基礎配置(引腳時鐘初始化,波特率設置,正常模式下的收發流程),其他的功能可參考hpm_sdk,后續根據需要也會進行文章闡述。
本文以hpm_sdk的操作接口API為例子,進而介紹CAN的相關知識。
關于更多的CAN/CANFD知識可以訪問CIA官網,spec文檔可以參考ISO11898-1-2015。本文部分闡述都是基于CIA和ISO的描述參考。
二、實現流程
hpm_sdk中,關于can的例子在samples/drivers/can。使用的板子為hpm6750evk2.
(一)引腳初始化和功能時鐘初始化
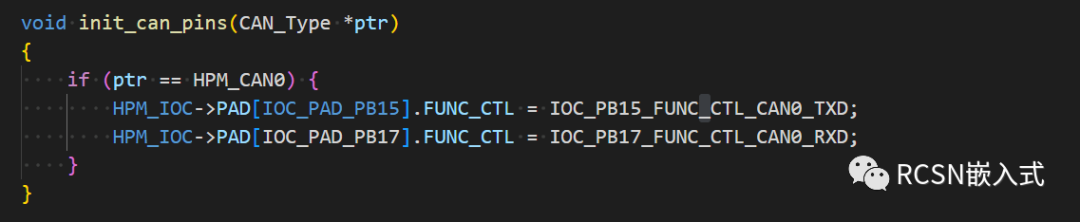
對于CAN的引腳初始化,極其簡單,只需要把引腳復用為CAN功能即可。參考hpm6750evk2的board中的CAN初始化。參考board_init_can API
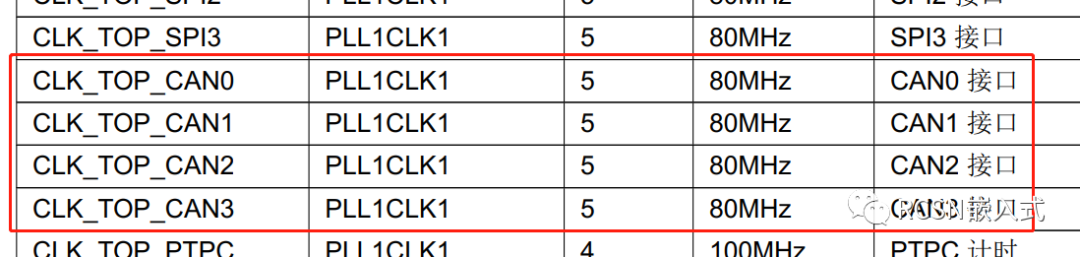
對于CAN功能時鐘的開啟,在hpm6750手冊中,默認時鐘由時鐘源PLL1_CLK1F五分頻得到,PLL1_CLK1為400M,那么CAN的功能時鐘就為80M.
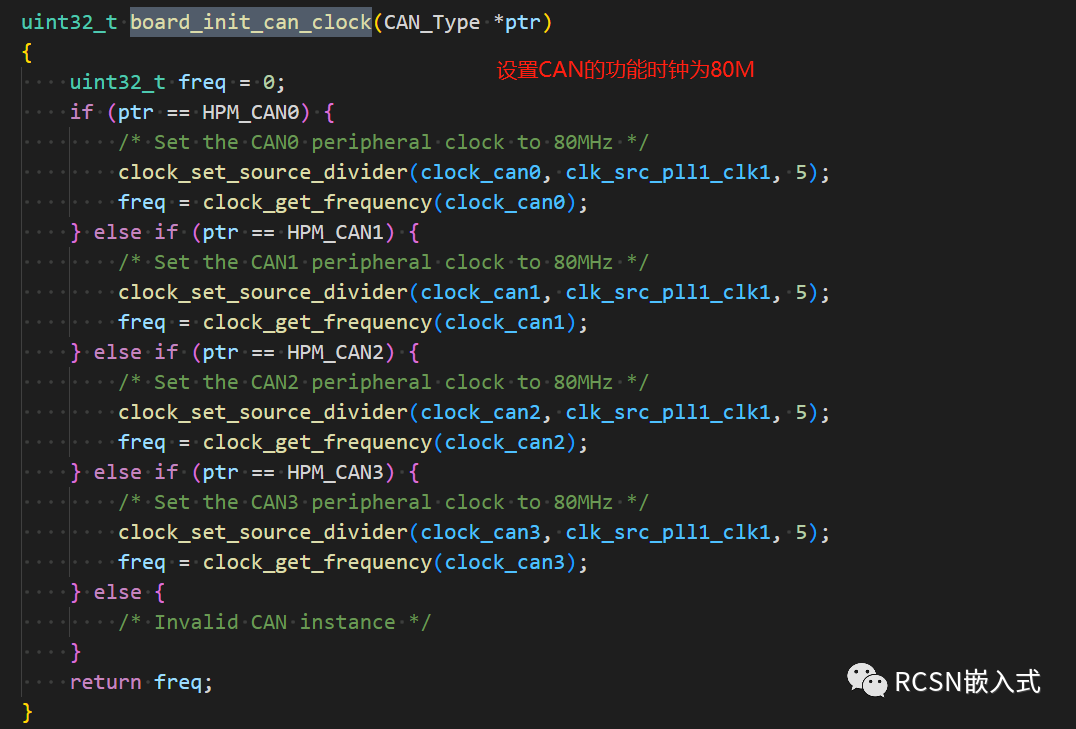
同樣sdk當中也做了相關時鐘初始化,參考board_init_can_clock API
(二)波特率設置
對于CAN差分信號,這里不做闡述,本文統稱的高低電平均為邏輯0和1。
跟uart一樣,都是需要每個位的的時間確定,保持雙方采樣的準確。在CAN的概念中,有一個比較重要的次,BitTime(CAN位時間),這個決定一個bit傳輸需要的時間,這也決定了波特率。比如一個位傳輸200ns,那么1S就可以傳輸100000000(ns)/200(ns) = 5000000bit,也就是5Mbps波特率。
在先楫官方HPM6700_HPM6400_UM手冊當中,對于CAN位時間有這么一段描述。
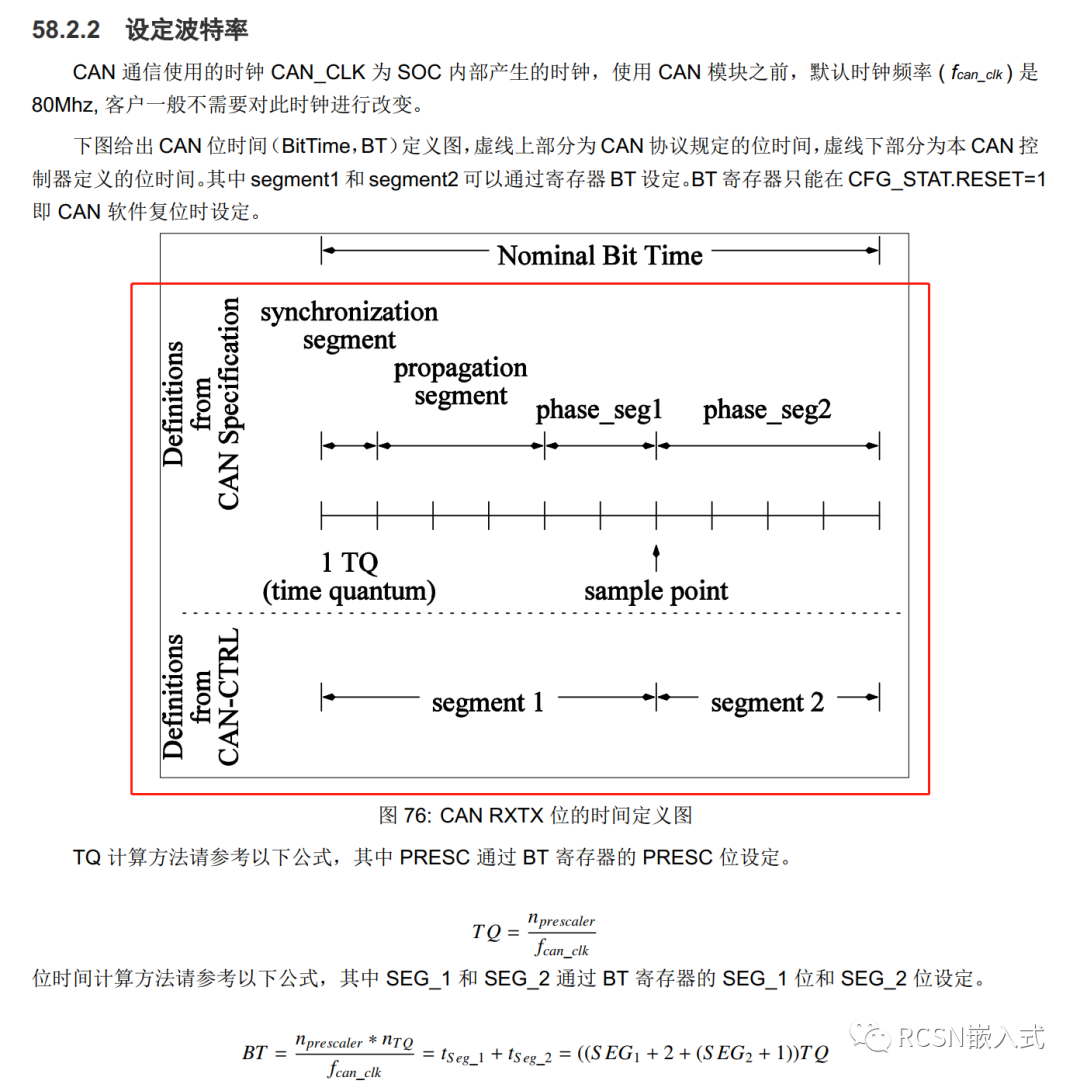
可以看到,一個位時序還包括了Sync_seg、Prop_Seg、Phase_Seg1, Phase_Seg2。Sample point指的是采樣點,也就是這段電平保持時間中的采樣位置點,比如200ns的位時間,采樣點80%,那么就是在160ns中采樣決定他是0或者是1。
在ISO11898-1:2015中,文檔也說明了這部分參數的定義。
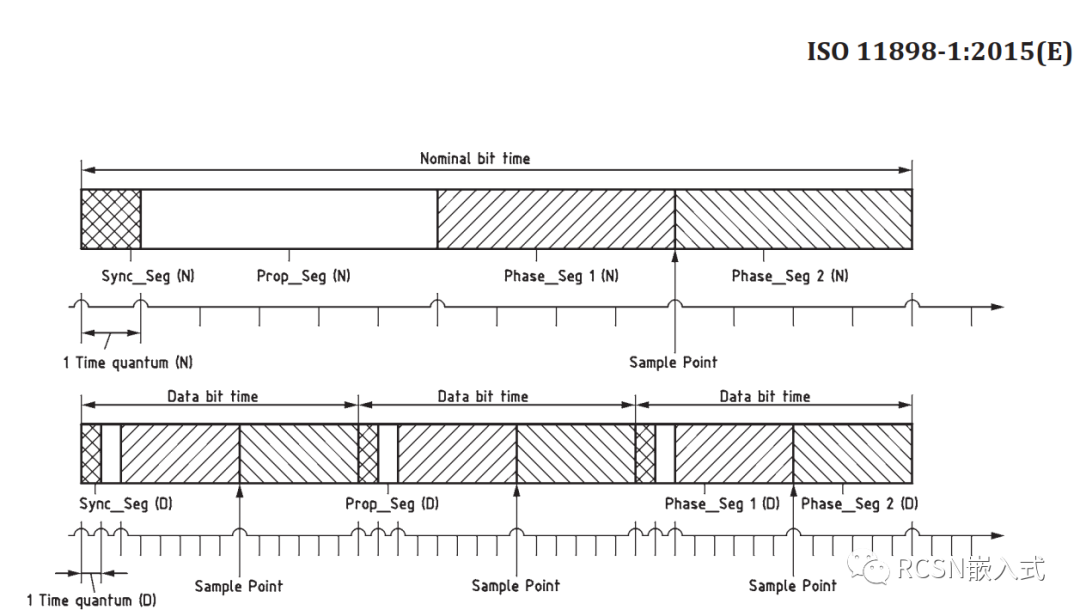
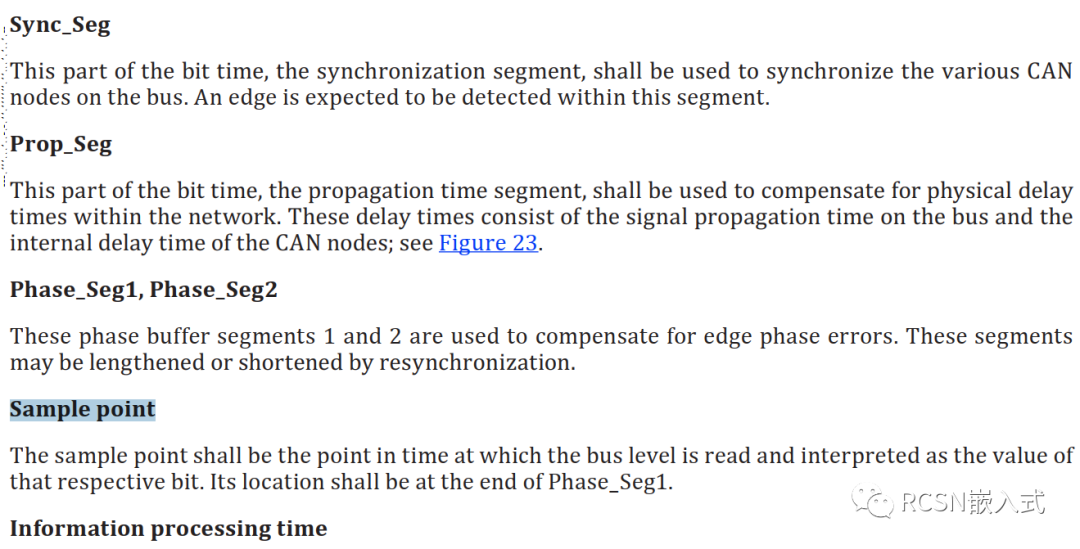
這里比較重要的是Sync_Seg,這部分的位時間指的是同步段,用來同步CAN總線的節點,若檢測到的跳變沿被包含在此段的范圍內,那么時序就是同步的,采樣點sample_point采樣到的電平就是該位的電平。上述可知道,該段的時間固定為1TQ,其他段時間均是相位的緩沖段,補償邊沿階段的誤差,保證位電平的穩定和重新同步。具體可看ISO文檔解釋。
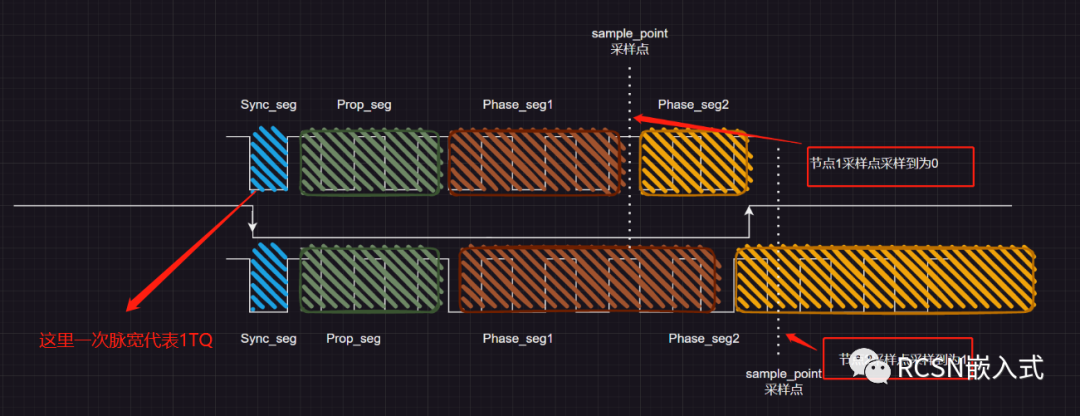
如果兩個節點位時間不同(各個位段時間不同),也就如果波特率不一樣或者差別到一定程度(CAN的波特率有一定的范圍,只要能保證采樣點的位置大致相同),那么采樣到的數據也有可能不一樣。所以對于位時間的各個段的參數需要保持一致,以便通信同步一致。
如果兩個節點位時間相同,CAN控制器會自身保持同步,同步的方式有兩種:硬同步和重新同步。
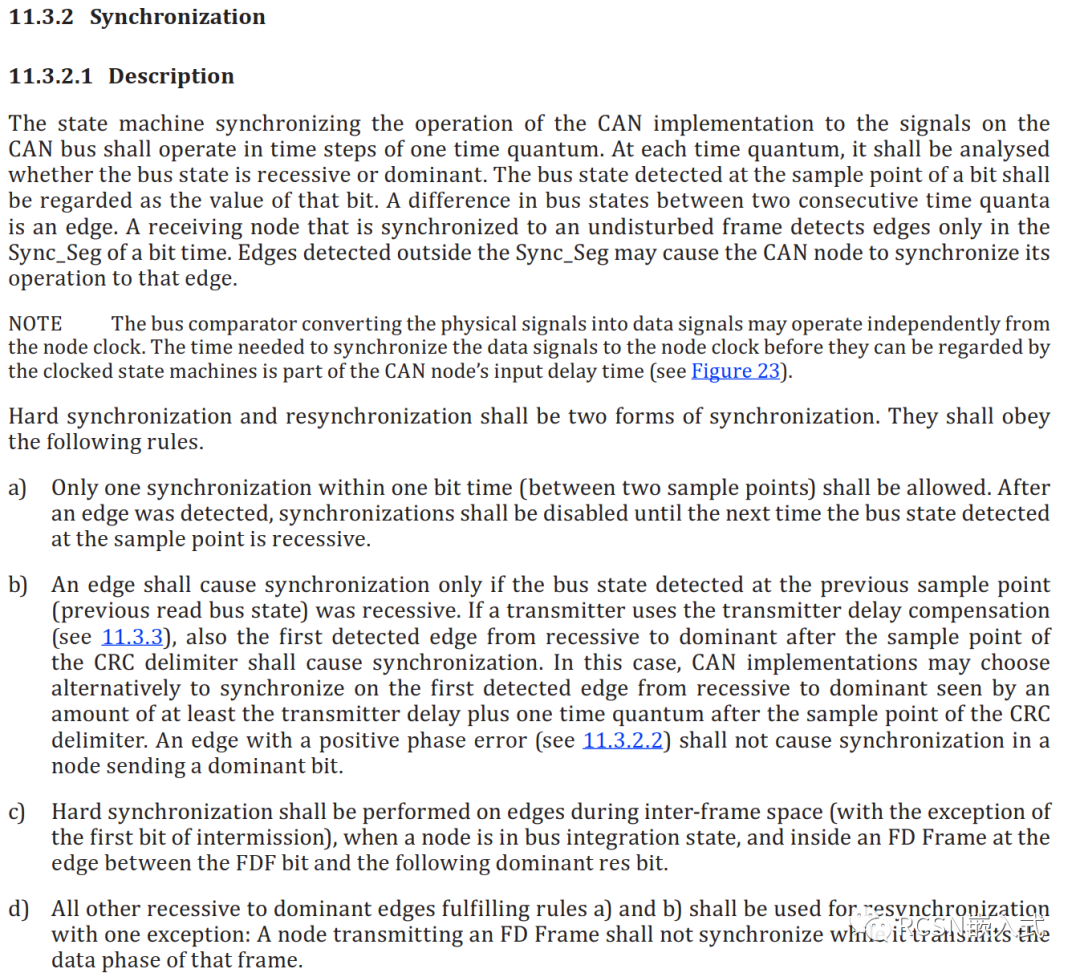
這兩種方式都必須遵守以下規則:
(1)、一位時間內(兩個采樣點之間)只允許一次同步。檢測到邊沿后,應禁用同步,直到下一次在采樣點檢測到的總線狀態為隱性。
(2)、僅當在前一個采樣點檢測到的總線狀態(前一個讀總線狀態)為隱性時,邊沿才應引起同步
(3)、當節點處于總線集成狀態時,在幀間間隔期間(除了間歇的第一位),以及在 CANFD 幀內,應在邊緣上執行硬同步。也就是在SOF上開始硬同步,其他bit都在重新同步。
(4)、滿足規則 1 和 2 的所有其他隱性到顯性邊緣均應用于重新同步,但有一個例外:傳輸 CANFD 幀的節點在傳輸該幀的數據階段時不應同步,而采取重新同步。
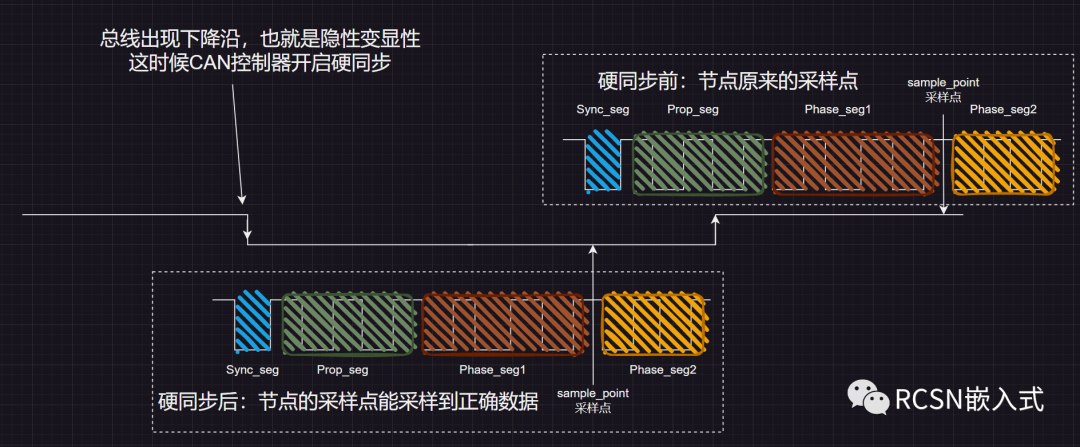
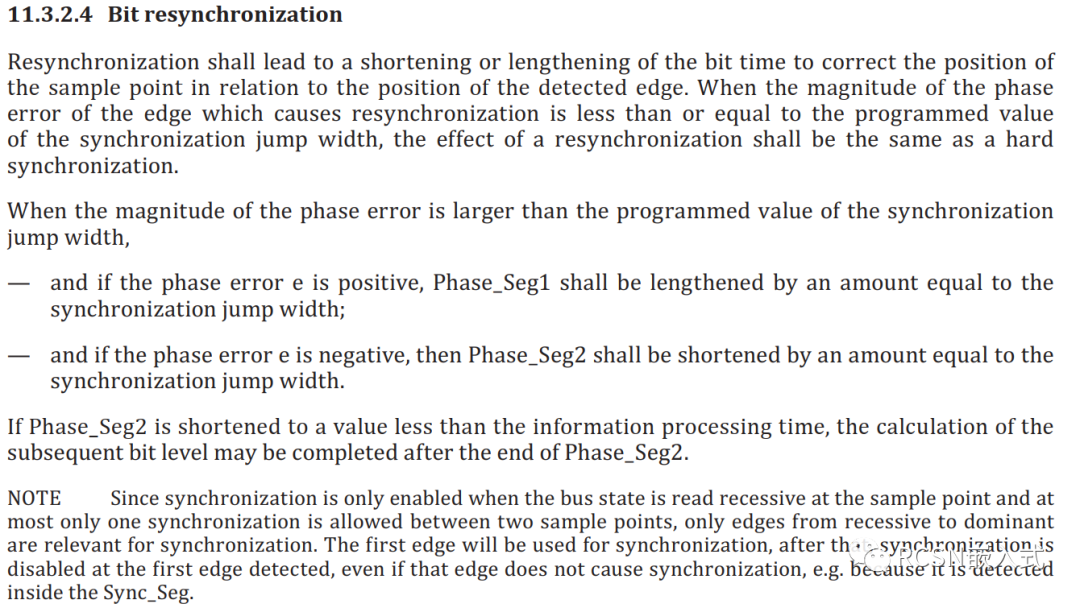
這里截取了ISO文檔說明:
1、硬件同步
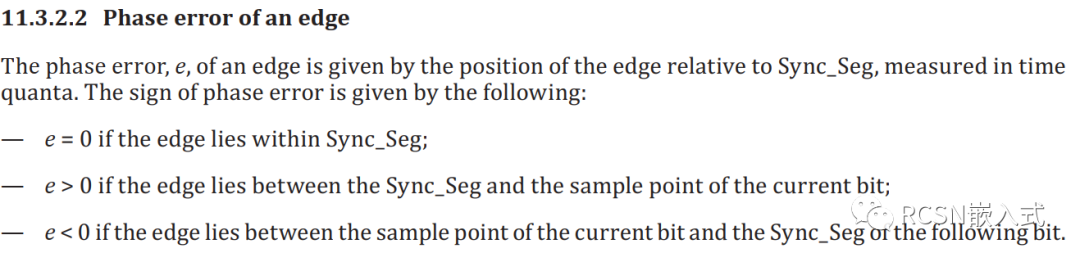
在以上規則中,我們可以通過檢測SOF幀起始,SOF幀的開始就是在CAN總線空閑下(連續11個位的隱形電平,也就是邏輯1),一旦有顯性電平出現,那就是有SOF幀開始,根據上述規則1和2,可以直接使用的是硬同步。硬同步會強制把位時間拉至邊沿,保持同步。這個階段不受同步跳轉寬度SJW限制。
ISO文檔同樣也有說明:
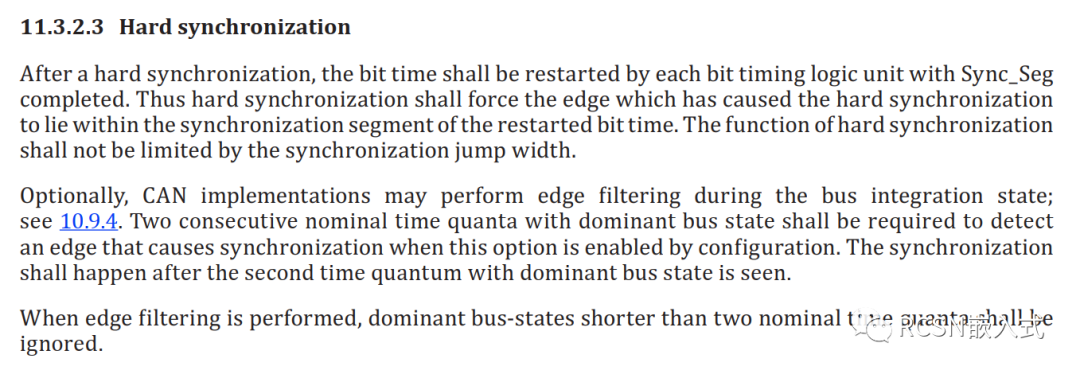
比如:以下波形,當檢測到SOF時候,CAN控制器需要滿足ISO標準,執行硬同步。
2、重新同步
如果在仲裁段相當比較長的時間內,比如ID段,連續的傳輸會帶來相位的左右偏移,這時候就需要重新同步了。這時候就需要SJW,對seg1和seg2適當進行延長或縮短一定的TQ。

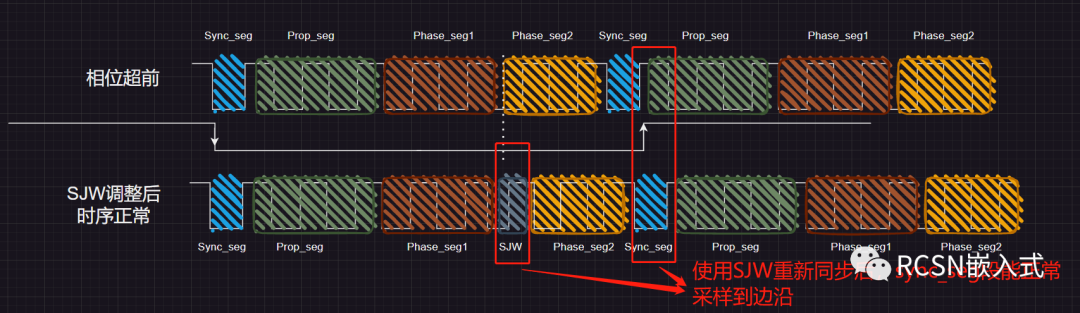
這看起來有點難理解,那么還是以時序圖來說明,以相位超前超后例子。
相位超前,CAN控制器會根據sjw同步跳轉寬度進行加入對應的TQ,使之sync_seg段能同步到下一個邊沿。
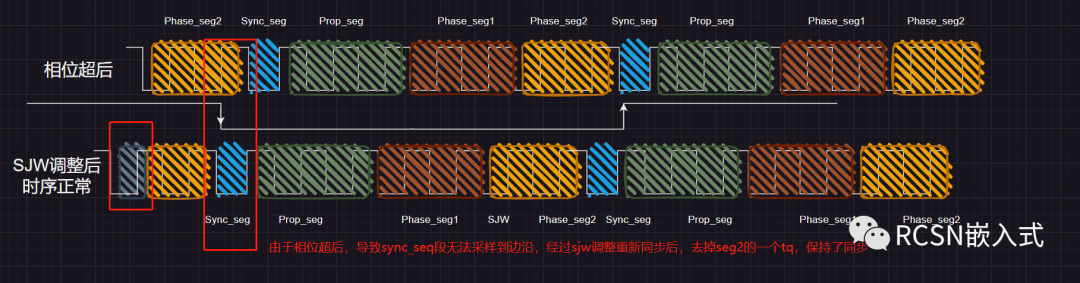
相位超后,CAN控制器會根據sjw同步跳轉寬度進行減少對應的TQ,使之sync_seg段能同步到下一個邊沿。
在上面的闡述中,采樣點的取值范圍尤為重要,對于同步上也是比較關鍵的參數,在ISO中并無此建議值,但是在hpm_sdk中有提及,建議是75%到87.5%。

從上面講了一大堆,其實上面所闡述的一些同步均由CAN控制器實現,但是為了方便理解軟件開發,是有必要了解。
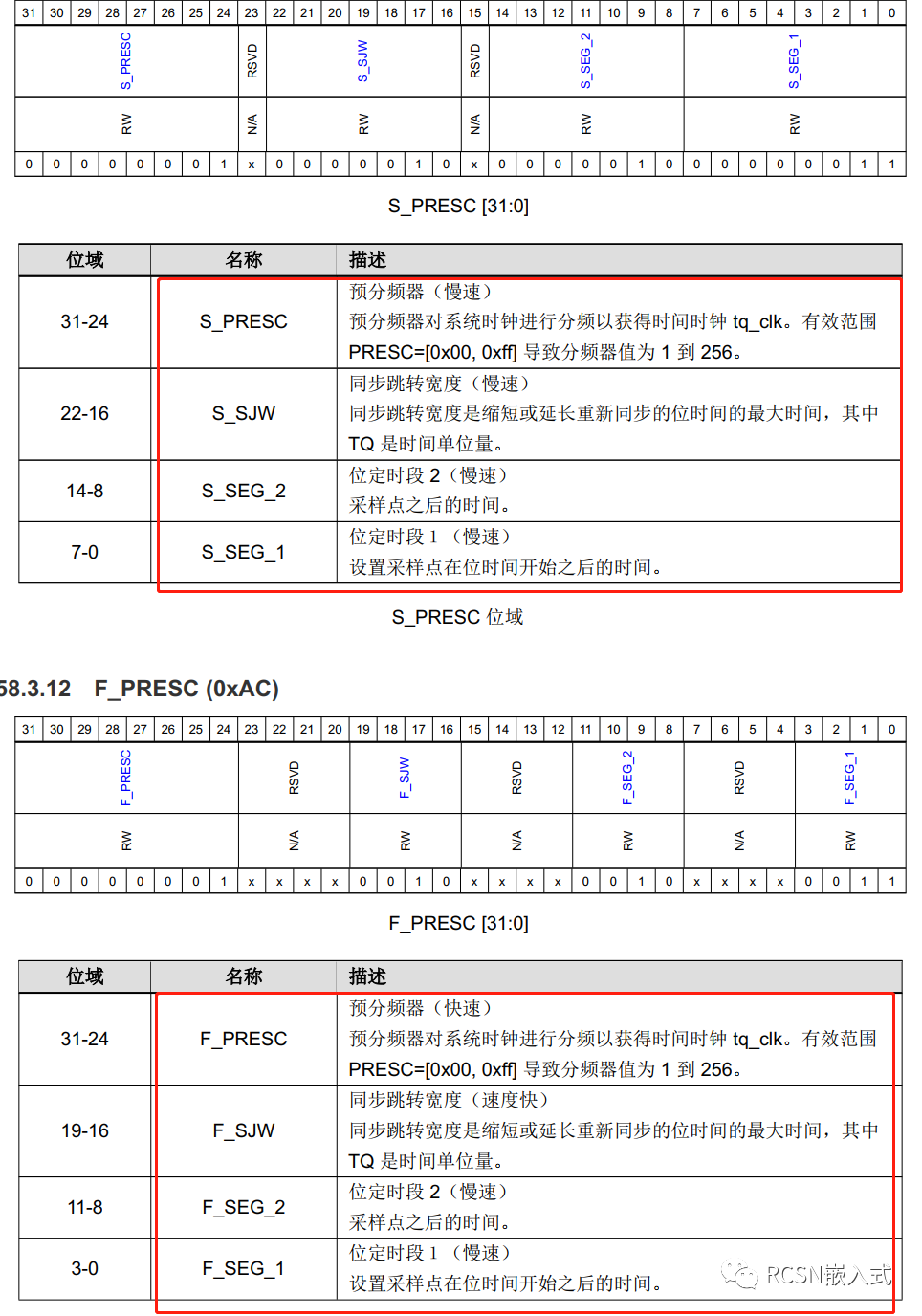
CAN的位時序涉及到CAN時基、sync_seq、sjw、seg1和seg2。在先楫當中也有涉及到這些寄存器,分為仲裁段(標稱位)和數據段位。需要注意的是:
先楫的CAN的seq1包括了位時序的sync_seg+prog_seg+phase_seq1。
先楫的CAN的seq2是位時序的phase_seq2。
根據ISO規定,sjw不計入到位時序中。
3、hpm_sdk的波特率設置API
sdk的CAN驅動的波特率設置,寫的比較貼心,提供了兩種方式來設置。一種是直接代入實際的波特率,第二種是自己寫入位時序參數。根據use_lowlevel_timing_setting這個變量來決定哪種方式。
如果需要使能CANFD,則需要開啟enable_canfd,超過1M的數據段波特率,建議開啟enable_tdc。
這些參數的成員說明可以查看SDK的can_config_t結構體,這里不做闡述。
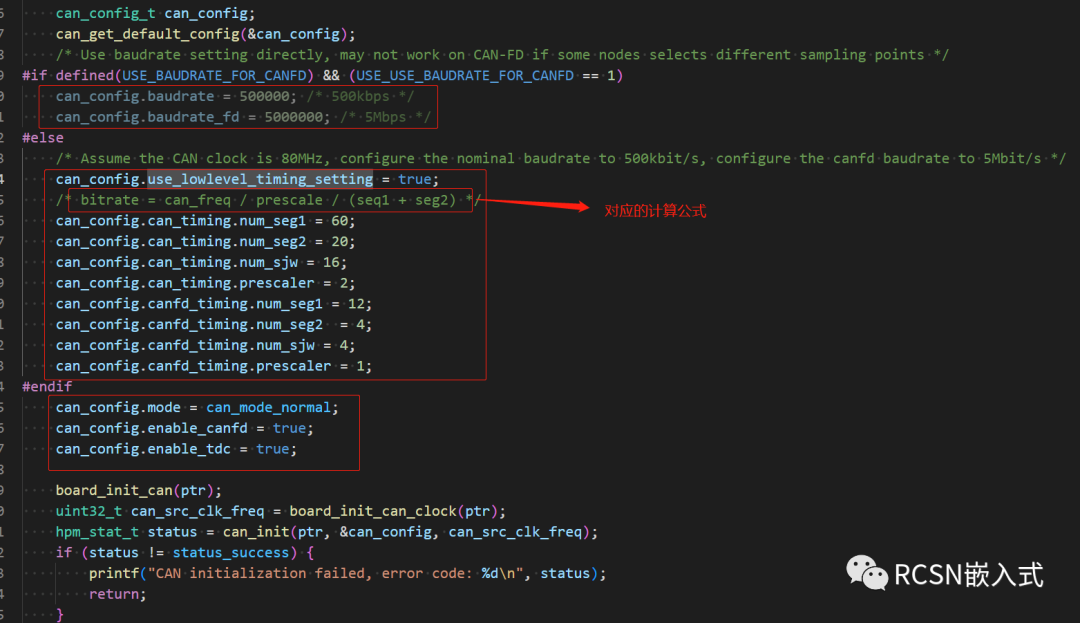
對于直接代入實際的波特率的方式,sdk使用ISO文檔建議的位時序參數,適合通用的場合。
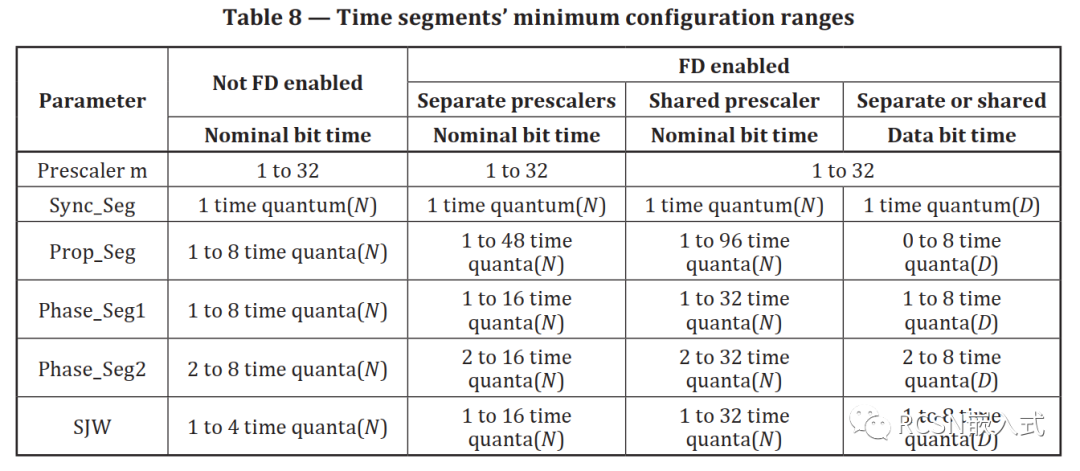
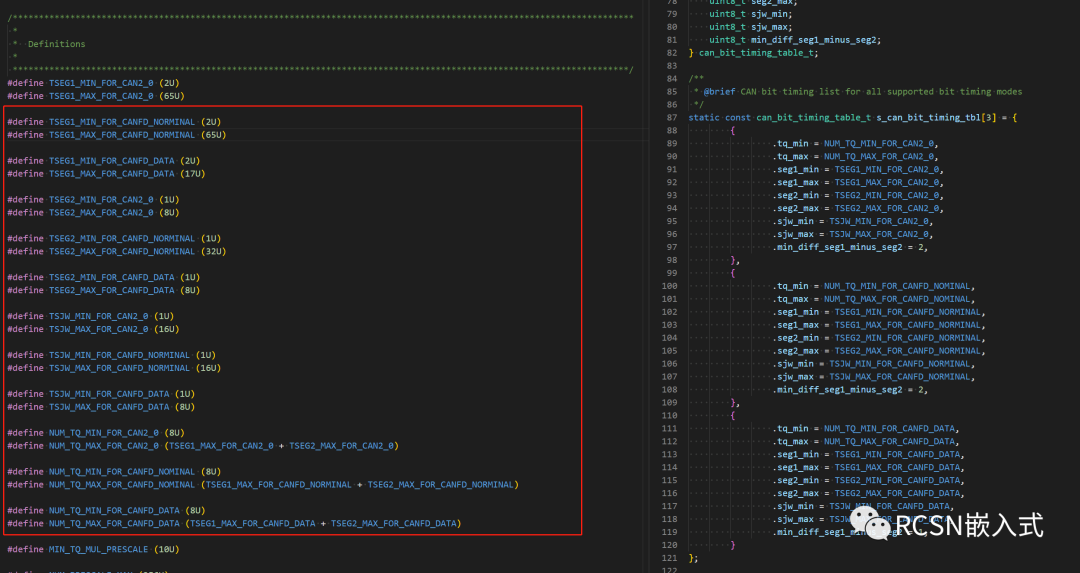
SDK中,根據波特率轉換成對應的位時序參數。API接口是can_set_bit_timing。里面調用了can_calculate_bit_timing這個API得出位時序參數帶入到CAN的對應寄存器中,完成波特率的設置。
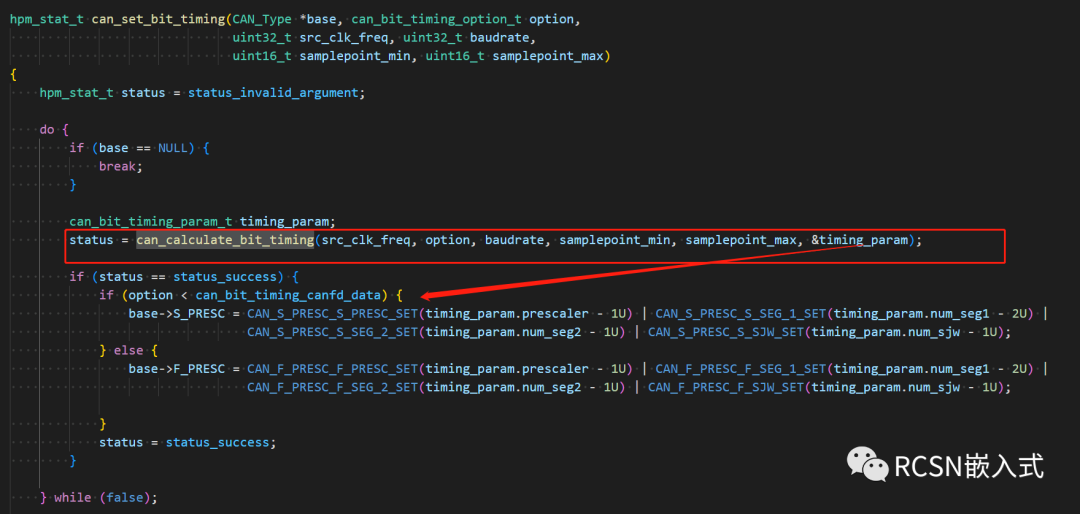
can_calculate_bit_timing根據波特率和CAN時鐘先算出TQ和分頻系數相乘值num_tq_mul_prescaler,然后依次代入分頻系數直到算出tq和分頻系數等于num_tq_mul_prescaler,得出一個位時序的TQ數量,再根據采樣點范圍算出SEQ1和SEQ2,但會再匹配ISO建議的位時序參數的對應最小和最大值,保證在此范圍內。否則返回錯誤。
需要注意的是:
先楫的這個CAN外設的CANFD支持非ISO標準和ISO標準,也就是enable_can_fd_iso_mode,sdk默認是使用ISO標準,需要使用can_get_default_config這個API初始化參數。否則可能就是非ISO標準。
非ISO標準和ISO標準,對于經典CAN不受影響,但是CANFD會報CRC錯誤。
(三)收發數據流程
對于CAN幀結構,這里不做闡述。調用ISO文檔的截圖理解:
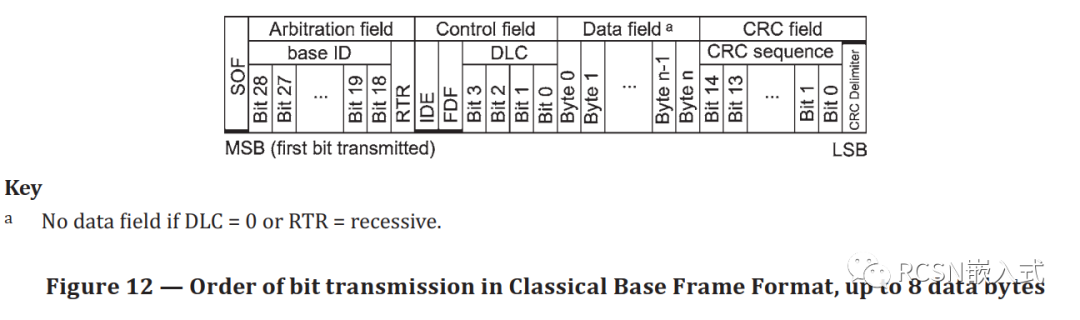
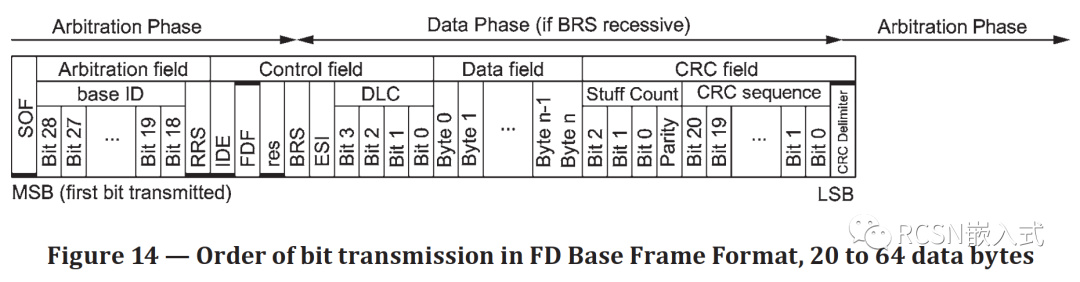
上述提到,對于接收來說,有16個FIFO;對于發送來說,有8個副發送緩沖器。這樣對于收發來說是相當足夠的。
在sdk當中,收發都提供了非阻塞和阻塞接口,分別對應的后綴是_noblocking或者blocking。
接收阻塞API:can_receive_message_blocking
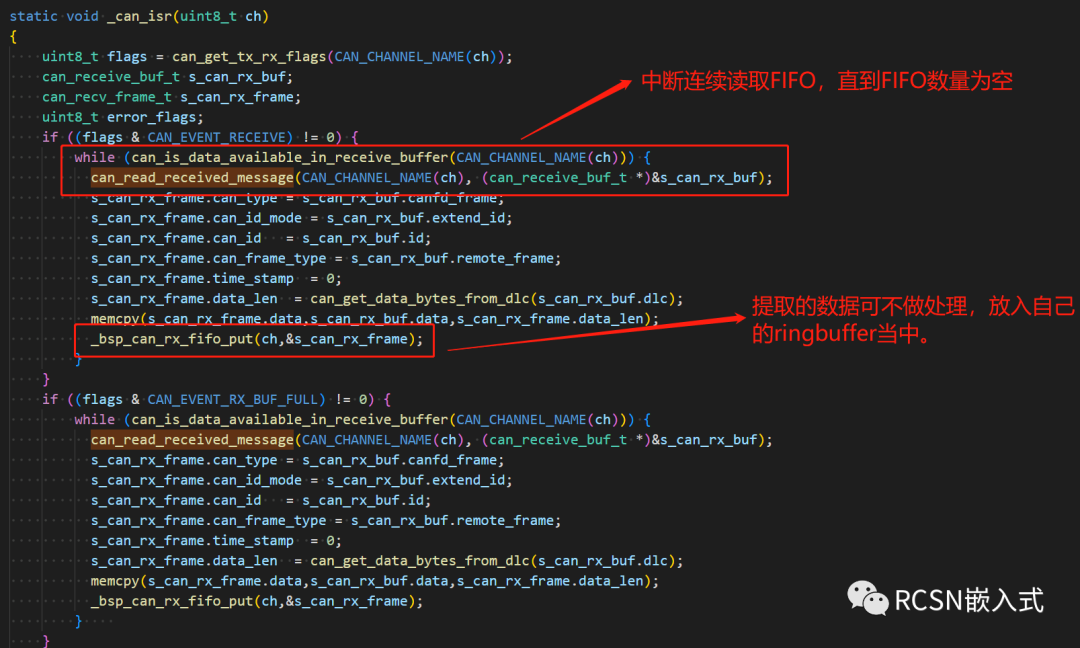
接收非阻塞API:can_read_received_message
建議使用非阻塞API,開啟接收中斷以及滿FIFO中斷。在中斷讀取FIFO數量,最大性能提取數據,然后依次調用can_read_received_message。比如:
對于發送:
阻塞接口:can_send_message_blocking
非阻塞接口:can_send_message_nonblocking
建議使用非阻塞接口,每次調用前判斷發送緩沖器是否滿,然后依次調用can_send_message_nonblocking塞入數據。比如:

(四)實現效果
HPM6750的四路CANFD,在500K仲裁段5M數據段的波特率下,可以幾乎跑滿載。
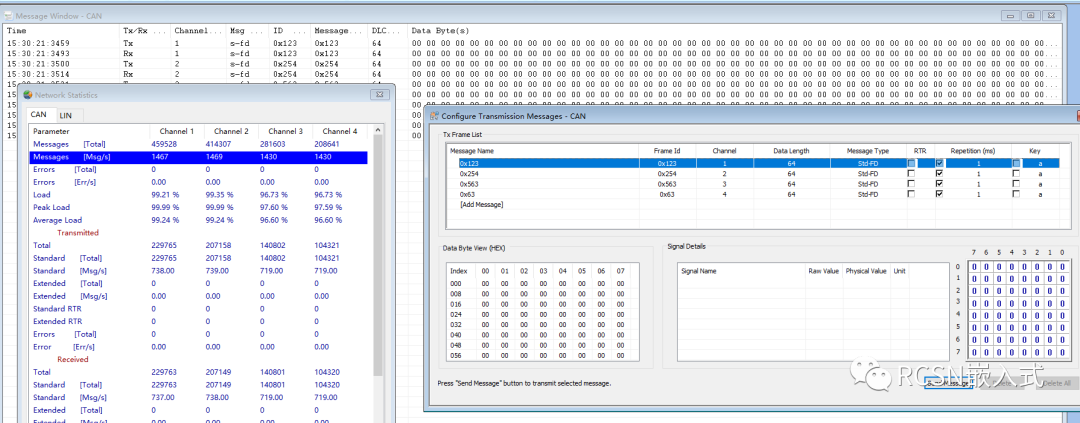
實驗平臺:hpm6750evkmini+stephen大佬開發的CANFD適配擴展板。
三、總結
對于CAN的,本文主要闡述波特率設置、數據收發流程。其他的比如過濾器組設置、總線錯誤等后續再闡述。
先楫HPM_SDK對于CAN驅動,相關API接口以及結構體定義比較清晰,容易入手使用。
先楫的CANFD的收發自帶FIFO緩存器,開發者可以根據需求使用,可以提高收發性能,達到滿載測試性能。
審核編輯:劉清
-
CAN總線
+關注
關注
145文章
1955瀏覽量
131098 -
CAN控制器
+關注
關注
3文章
74瀏覽量
15103 -
PLL電路
+關注
關注
0文章
92瀏覽量
6475 -
CANFD
+關注
關注
0文章
59瀏覽量
5014 -
HPM6750
+關注
關注
0文章
2瀏覽量
128
原文標題:開發者分享:[玩轉先楫CANFD外設系列之一]輕松搞起CANFD
文章出處:【微信號:HPMicro,微信公眾號:先楫半導體HPMicro】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
玩轉先楫CANFD外設系列之一:輕松搞起CANFD

OpenHarmony開發者文檔
喜報|HarmonyOS開發者社區連獲業內獎項,持續深耕開發者生態
華為開發者大會2021:鴻蒙輕松實現操作系統靈活組裝
華為2021開發者大會最新消息
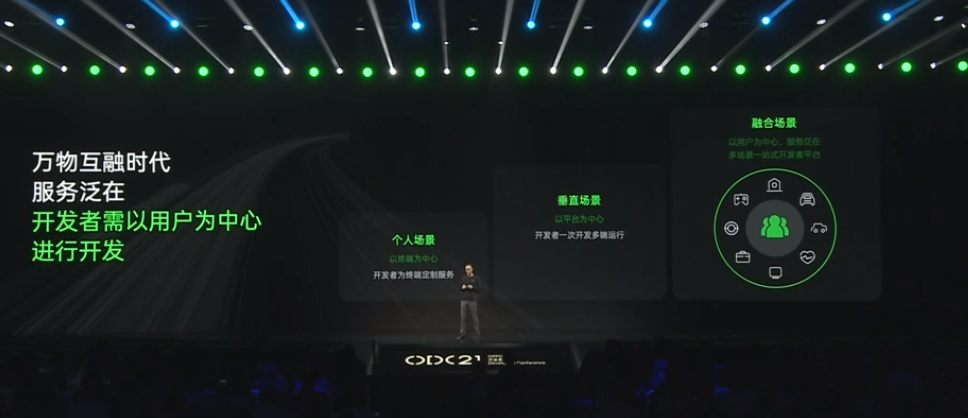
OPPO開發者大會:開發者需要以用戶為中心進行開發
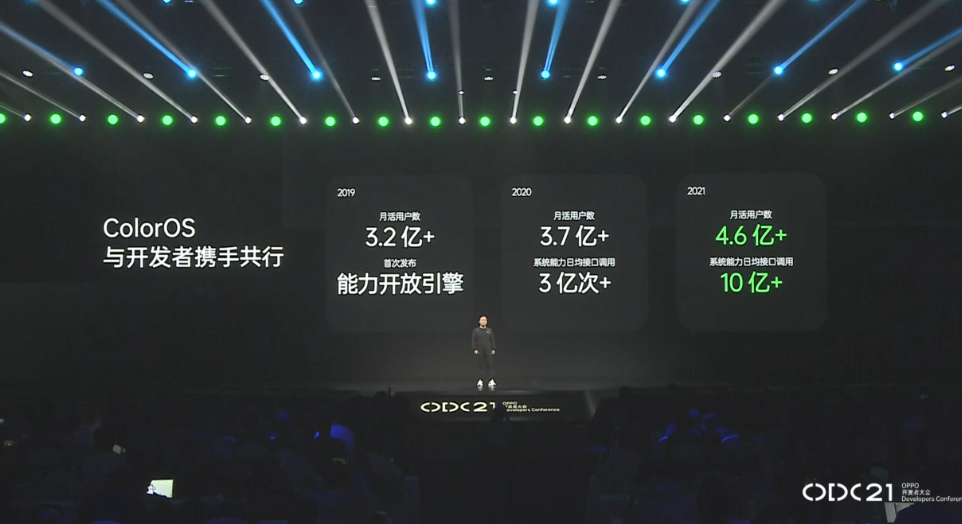
OPPO開發者大會:OPPO將持續為開發者提供幫助
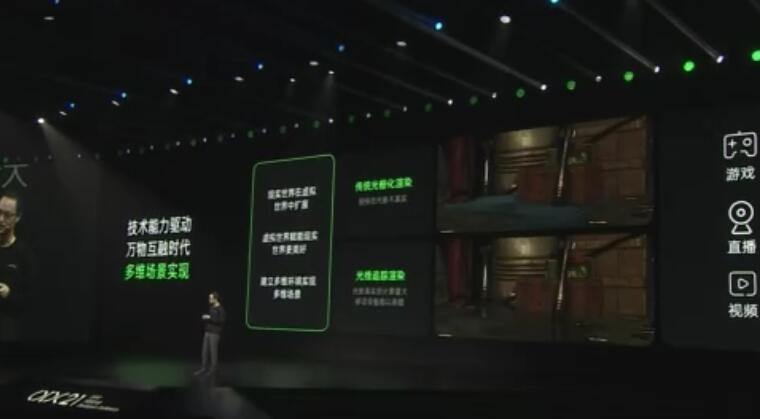
2021 OPPO開發者大會:異構計算開發者價值


2021年OPPO開發者大會:賦能開發者
2021 OPPO開發者大會:小布開發者平臺生態

2021 OPPO開發者大會:OPPO滿足開發者需求

涂鴉開發者大會即將開幕,賦能開發者打造IoT發展新引擎






 工商網監
工商網監
評論