 STM32 SPI基礎內容
STM32 SPI基礎內容
SPI,全稱為 Serial Peripheral Interface(串行外設接口),是一種用于短距離通信的同步串行通信接口,主要應用在嵌入式系統。
SPI的應用場合很廣,顯示模組、時鐘芯片、存儲芯片、溫度傳感器等眾多器件都有使用SPI接口通信。
這些器件通常作為從設備,單片機作為主設備來控制它們,今天就結合STM32來分析一下SPI常見通信有異常的問題。
STM32 SPI基礎內容
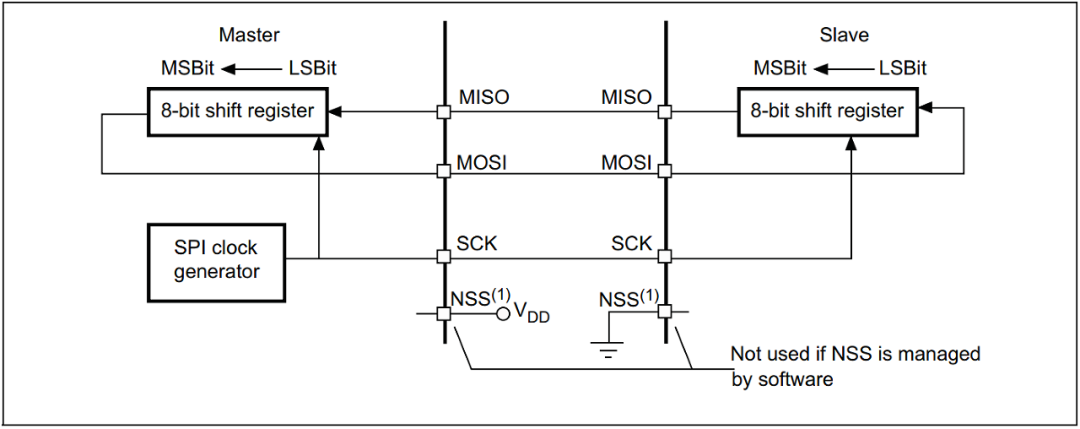
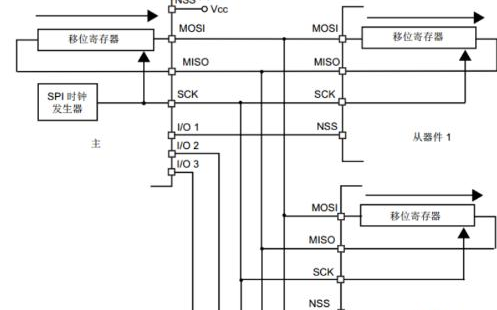
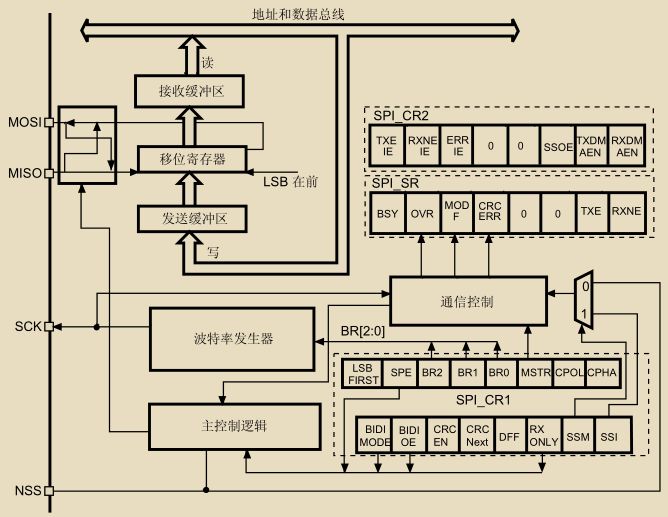
絕大部分STM32芯片都有多個SPI外設,它可與外部SPI器件進行半雙工/全雙工同步串行通信。 1. SPI特性
三條線全雙工、雙線單工同步傳輸
支持 8 位或 16 位傳輸幀格式選擇
支持主模式或從模式操作
可編程的時鐘極性和相位
支持 MSB 或 LSB 數據順序
支持DMA收發數據
更多特性請查閱《STM32參考手冊》。
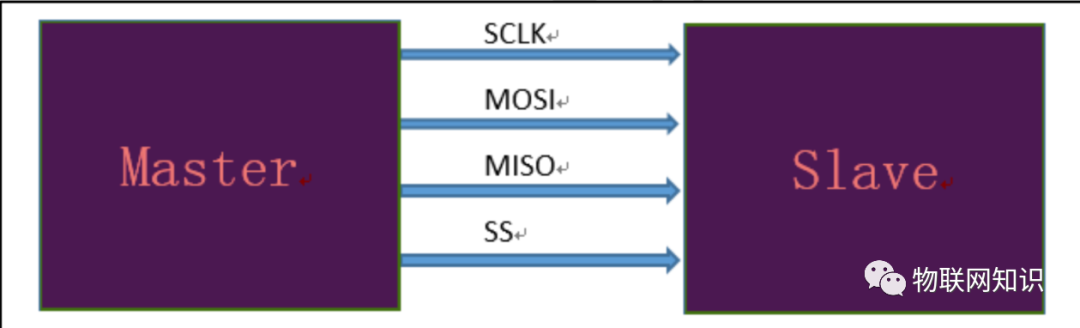
2. 引腳描述
MISO:主輸入/從輸出數據;
MOSI:主輸出/從輸入數據;
SCK:時鐘(主輸出,從輸入時鐘);
NSS:從器件選擇,可理解片選信號;
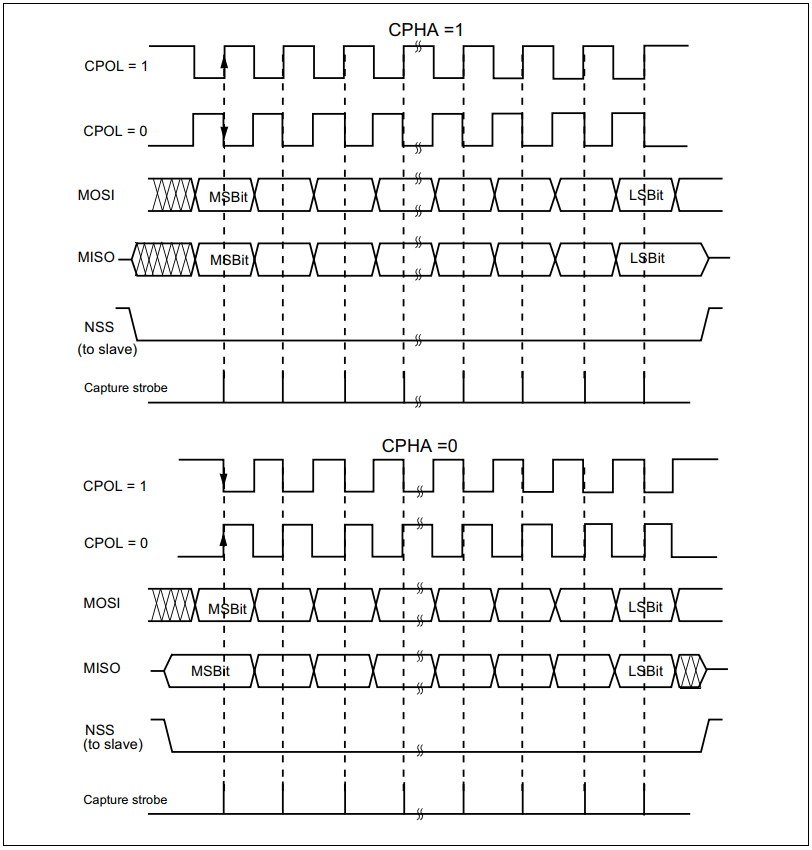
3. SPI時序
SPI的時序中有兩個參數需要注意,那就是時鐘相位和時鐘極性。在STM32中,SPI時序由CPOL 和 CPHA 這兩位來決定。
通過軟件配置這兩個參數,可分為四種時序關系,如下圖:
4. 數據幀格式
串行同行數據傳輸分為 MSB 和 LSB,也就是最高有效位在前,還是最低有效位在前。(注:最左邊的比特位即為最高有效位)。
比如傳輸一個字節:0x95(1001 0101)。

如果按照MSB(高位在前),則發送順序:1001 0101。
如果按照LSB(低位在前),則發送順序反過來:1010 1001。
STM32 SPI參數配置
通常STM32的SPI作為主機連接外部從機,要與從機建立正常通信,就必須與從機的參數匹配才行。
這里以【STM32作為SPI主機讀寫SPI Flash】為例,主要配置參數:雙向全雙工、主機模式、8位數據、MSB等。
1. 標準外設庫配置
SPI_InitTypeDef SPI_InitStructure; SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //雙向全雙工 SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //主機模式 SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //8位數據 SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //時鐘極性:空閑為高 SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //時鐘相位:第2個時鐘沿捕獲 SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //軟件控制NSS信號 SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4; //波特率預分頻值為4 SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //數據傳輸從 MSB 位開始 SPI_InitStructure.SPI_CRCPolynomial=7; SPI_Init(SPI1,&SPI_InitStructure);▲左右滑動,查看完整代碼
2. STM32CubeMX配置 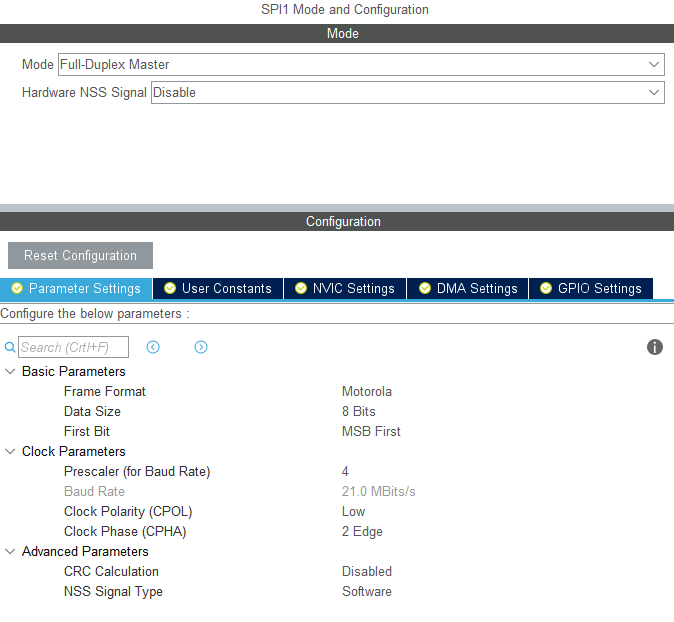
首先選擇全雙工主機模式,然后再逐步配置下面參數。這里的波特率時鐘灰色不可配置,由你系統時鐘和分頻時鐘決定。
這些配置參數比較容易理解(英文清晰明了),若不懂可針對性查閱參考手冊。
STM32 SPI常見問題
雖說SPI相對比較簡單,但在實際應用過程中還是會存在一些奇怪的問題,下面通過案例來分析SPI常見的一些問題。
問題一:NSS片選問題
有工程師使用硬件NSS控制從機,以為NSS信號是自動控制,導致操作從設備失敗。
分析原因:STM32 SPI的NSS信號為片選信號,可“使能”為硬件控制(參看上面參數配置)。
但在應用中同樣需要軟件操作才能控制NSS信號(高低),比如:
SPI_NSSInternalSoftwareConfig(SPI1, SPI_NSSInternalSoft_Set);
▲左右滑動,查看完整代碼
解決辦法:按照通信時序,控制NSS信號高低(通常低有效)。
問題二:SPI引腳復用功能問題
STM32的SPI是一種復用功能,之前使用標準外設庫的工程師容易遺漏復用功能的配置導致SPI不能使用。
分析原因:SPI有些引腳對應的是特殊功能的引腳,比如:PB3(MISO)對應的是 JTDO,如果不配置則默認這個引腳的功能就是 JTDO的功能。
以前經常存在這種問題,但現在通過工具STM32CubeMX配置時自動配置了復用功能。
解決辦法:參考官方提供在初始化代碼中配置復用功能(同時,推薦使用HAL庫)。
GPIO_PinAFConfig(GPIOA, GPIO_PinSource5, GPIO_AF_SPI1); GPIO_PinAFConfig(GPIOA, GPIO_PinSource6, GPIO_AF_SPI1);
問題三:時鐘速率過高問題
有工程師購買一個通信為SPI的模塊,最高通信速率8MB/s,他使用10.5MB/s通信速率也能用,但偶爾會出現通信異常。
分析原因:一個芯片標稱的最高速率其實是相對保守的值,在條件比較好的情況下超過了最高值也能用,但不能保證穩定性。
STM32 SPI的時鐘頻率由系統時鐘和分頻決定,有的工程師沒有深入理解這些參數,發現能用就不管了。
如上章節中的21MB/s,如果修改系統時鐘,其實這個值會發生相應變化
解決辦法:最簡單的辦法就是修改分頻值。同時,如果環境惡劣,建議使用屏蔽線。(在保證整個產品系統實時性的同時,盡量降低通信速率)
問題四:時鐘相位問題
有不少工程師在調試SPI時會遇到數據“移位”的問題,數據能收發為什么會出現這種問題呢?
分析原因:SPI通信時鐘由主機提供,本身上電時(主從)各自的信號就不穩定,如果從機時鐘相位也不匹配,就會因為時鐘引起數據移位,或者異常的情況。
解決辦法:軟件上匹配SPI主從設備的時鐘相位,使用通信協議,CRC、 checksum校驗等。
- 審核編輯:彭菁
-
數據
+關注
關注
8文章
7139瀏覽量
89574 -
可編程
+關注
關注
2文章
874瀏覽量
39932 -
STM32
+關注
關注
2272文章
10923瀏覽量
357555 -
時鐘
+關注
關注
11文章
1746瀏覽量
131799 -
SPI
+關注
關注
17文章
1721瀏覽量
92118
原文標題:單片機SPI通信異常分析
文章出處:【微信號:strongerHuang,微信公眾號:strongerHuang】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
STM32之AN2576_STM32F10xxx SPI 應用示
STM32的SPI接口、cubeMX軟件配置SPI接口和分析SPI相關代碼
STM32F1x HAL庫學習筆記(12)硬件 SPI 的配置

SPI的基本知識(偏向STM32中的SPI)
STM32的SPI相關知識
基于STM32的SPI通信
STM32的SPI控制器實現SPI





 工商網監
工商網監
評論