") 慣性導航系統(tǒng)高精度定位定向模組M20助力無人駕駛車輛隧道精準導航
慣性導航系統(tǒng)高精度定位定向模組M20助力無人駕駛車輛隧道精準導航
慣性導航系統(tǒng)是一種利用慣性測量單元(如加速度計和陀螺儀)來測量和跟蹤物體位置、方向和速度的技術。在無人駕駛領域,慣性導航系統(tǒng)通常與衛(wèi)星導航系統(tǒng)(如北斗、GPS)結合使用,以提供更高精度和更可靠的定位和導航解決方案,特別是在信號受限的環(huán)境,比如隧道內部。
M20定位定向模組是一種集成了慣性測量單元的高精度導航設備,具備在復雜環(huán)境中提供準確定位和導航的能力。在無人駕駛車輛穿越隧道等GPS信號不穩(wěn)定或無法使用的區(qū)域時,M20模組可以通過慣性測量來持續(xù)跟蹤車輛的運動狀態(tài),確保車輛在隧道內精準導航。
M20模組的關鍵優(yōu)勢包括:
1. 高靈敏度和高精度:采用多模GNSS芯片,同時支持北斗、GPS和GLONASS等多個衛(wèi)星系統(tǒng),精度可達厘米級和亞米級。
2. 多種定位模式:支持單點定位、差分定位和RTK(實時動態(tài)定位)技術,可按需選擇不同的定位模式。
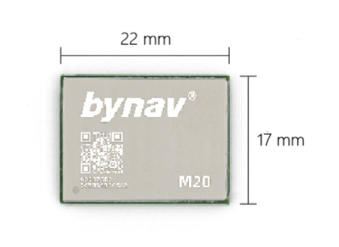
3. 小尺寸、低功耗:模組尺寸小,適用于應用場景廣泛的嵌入式設備,并具有低功耗、高可靠性等優(yōu)點。
4. 防震抗干擾:具有優(yōu)秀的抗震性能和抗干擾能力,適用于各種惡劣的環(huán)境條件。
北斗高精準定位模組可以應用于航空、航天、地質、環(huán)境、氣象、災害監(jiān)測和預警等領域,支持各類定制化解決方案,并有廣泛的應用前景。
深圳晶立弘泰電子科技的高精度定位定向模組M20基于北云科技新一代22nm制程高性能車規(guī)級GNSS SOC芯片Alice,54pin LGA封 裝,內置高精度測量引擎、導航引擎以及功能安全處理器,符合ASIL B功能安全等級*,支持高 性能RTK解算、抗干擾*、抗欺騙*與L-BAND PPP*及CLAS*等功能,能夠有效地應對衛(wèi)星信號 干擾、遮擋等苛刻環(huán)境,提供連續(xù)、實時、可信的高精度位置信息,具有高集成度、高性能、低 功耗、小尺寸等特點,可應用于自動駕駛、高級駕駛輔助、車道級導航、無人機、智能機器人、 精準農(nóng)業(yè)、測量測繪等領域。

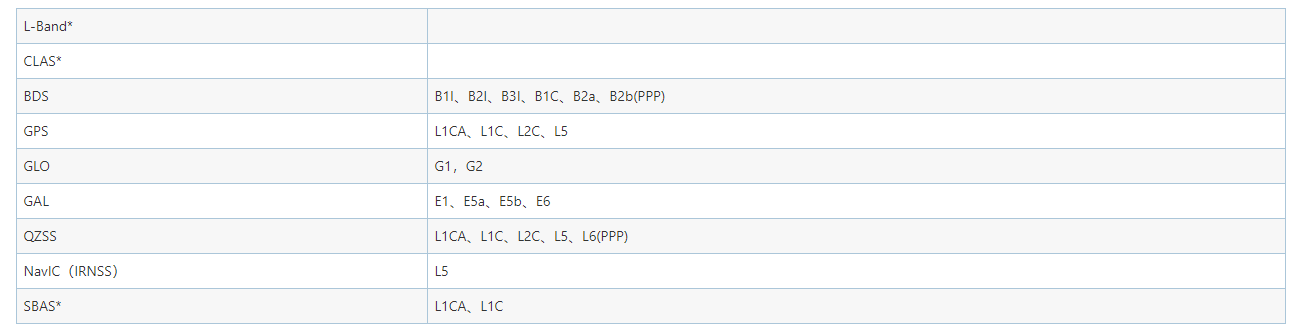
支持全系統(tǒng)全頻點GNSS信號接收及解算
采用bynav REAL(Ransac Enhanced Advanced Location)GNSS定位引擎,內置完好性監(jiān) 測和部分模糊度解算算法,提高了城市環(huán)境中多徑、干擾條件下的容錯率和固定成功率,定位 解算結果更加穩(wěn)健。
- 22nm制程GNSS SOC芯片Alice
- 全系統(tǒng)全頻點GNSS(1507個通道)
- L-BAND星基增強
- 支持NRTK/PPP/PPP-RTK/CLAS
- 抗干擾抗欺騙
- AEC-Q104
- ISO 26262 ASIL B
- 具備豐富的外設接口
高性能抗干擾GNSS測量與定位引擎
針對預期功能安全與網(wǎng)絡安全的需求,內置SAIF(Smart Advanced Interference deFense) 高性能復合干擾抑制技術,性能卓越(干信比65dBc),支持掃頻、單頻、多音、窄帶、脈沖等 多種干擾樣式的抗干擾處理,對常見干擾信號如車載防跟蹤設備、雷達/機場信號塔等,進行 高量化位數(shù)的信號預處理與干擾抑制,大幅提升車載場景下高精度定位的可用性與完好性。
支持L-BAND CLAS星基增強,支持NRTK/PPP/PPP-RTK
支持L-Band星基PPP定位功能,在常規(guī)差分服務或移動通信服務無法覆蓋的環(huán)境中也可提供 高精度定位。支持北斗三號B2b PPP解算、QZSS CLAS PPP-RTK解算及主流PPP-RTK差分 服務。充分利用北斗四頻信號與伽利略四頻信號,大幅提升PPP收斂速度,提升高精度定位可用性。
支持ASIL B功能安全等級
基于ISO26262 ASIL B功能安全設計,內置功能安全GNSS芯片(bynav Alice芯片,基于功能 安全要求進行了全新的架構設計)及功能安全算法。可為智能汽車、自動駕駛等提供具備系統(tǒng) 級功能安全的高精度PVT。
M20模塊特點:
22nm制程GNSS SOC芯片Alice
全系統(tǒng)全頻點GNSS(1507個通道)*
L-BAND星基增強*
支持NRTK/PPP/PPP-RTK/CLAS*
抗干擾抗欺騙*
AEC-Q104
ISO 26262 ASIL B*
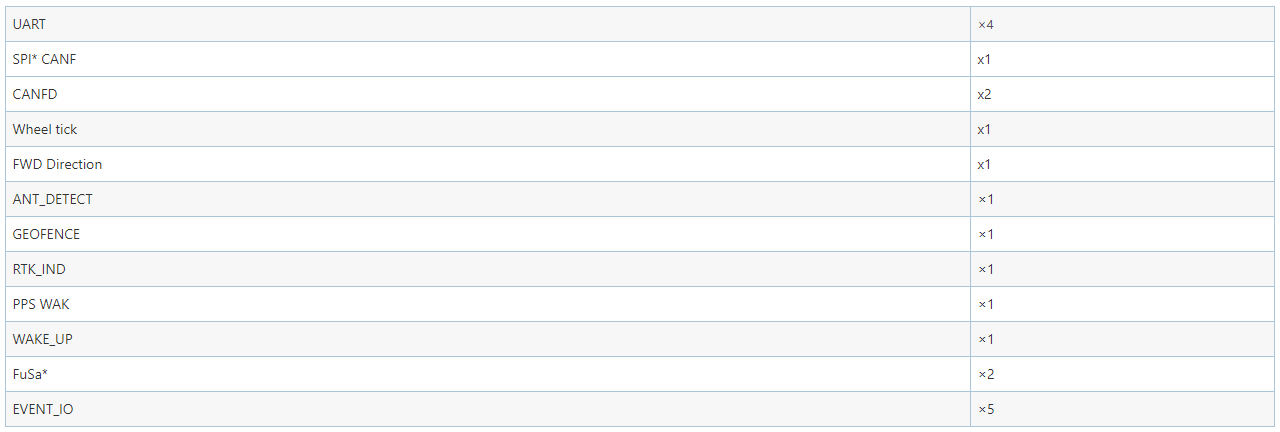
具備豐富的外設接口
規(guī)格指標
系統(tǒng)
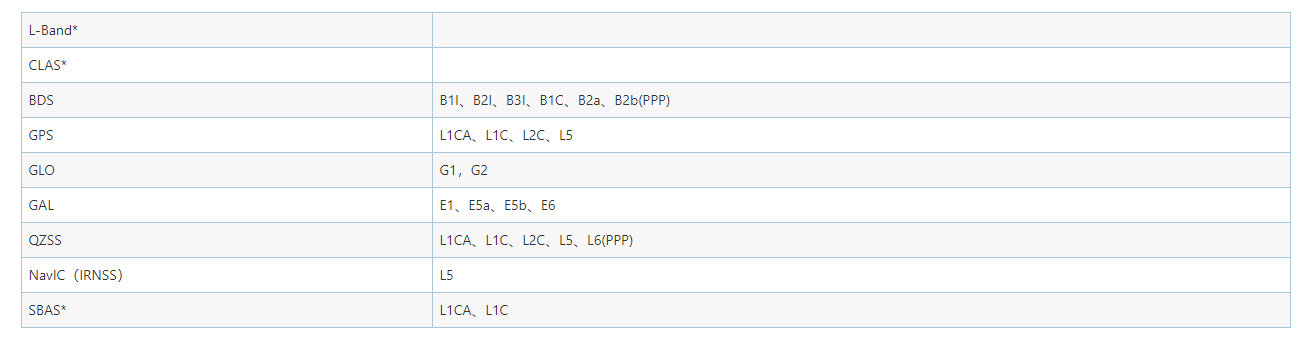
全系統(tǒng):GPS、BDS、GLO、GAL、QZSS、IRNSS
通道數(shù)
1507 通道( 含750FuSa 通道)
信號跟蹤
抗干擾 *
抗單頻、多音、窄帶、掃頻、脈沖干擾;干信比:65 dBc
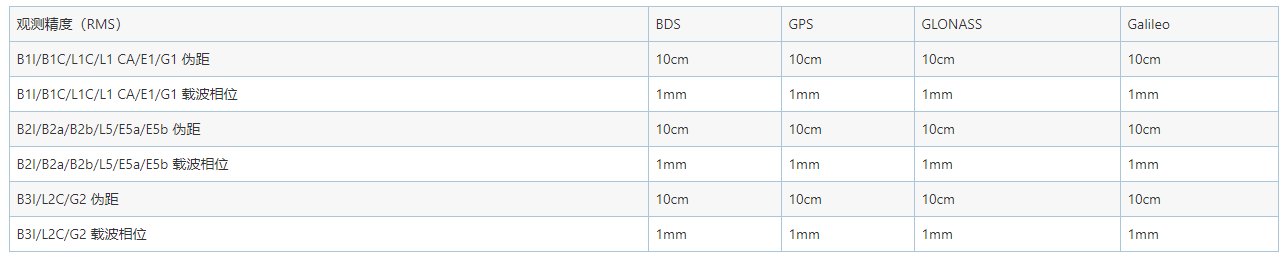
水平定位精度(RMS)

高程定位精度(RMS)

最大數(shù)據(jù)速率

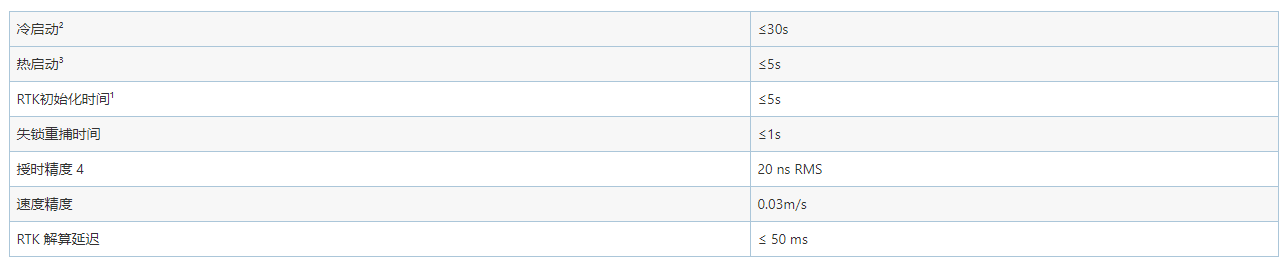
首次定位時間
對外接口
物理和電氣

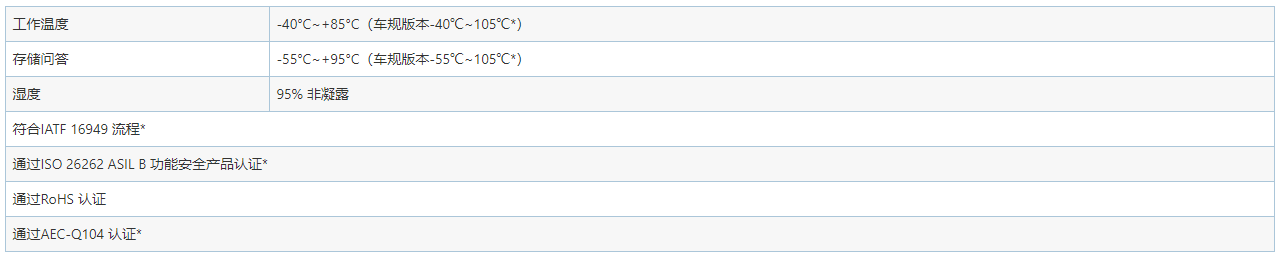
環(huán)境及其他
型號及功能
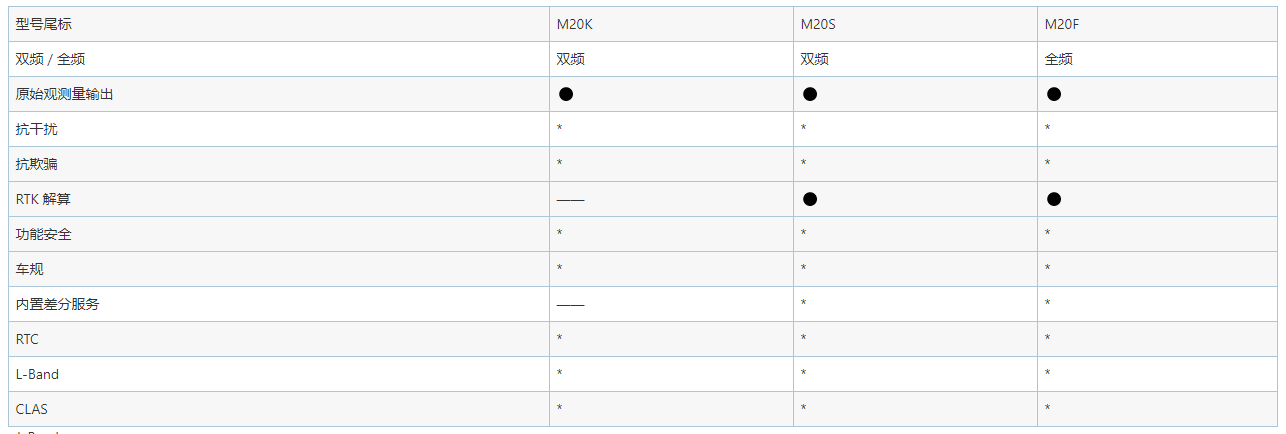
? L Band
? CLAS 功能
? 抗干擾功能
? 抗欺騙功能
? 功能安全
? 車規(guī)
? 內置差分服務
? RTC 上述功能均為選配
備注:
1.典型值。性能規(guī)格受制于 GNSS 系統(tǒng)特性, 衛(wèi)星幾何分布,基線長度,多徑效應和干 擾;
2. 典型值。無歷書或星歷,沒有概略位置或 時間;
3. 典型值。保存歷書和最近星歷且已知大 概位置和時間;
4. 授時功能可選,精度不包括由于 RF 或天 線帶來的零值;
5. 典型值。不含天線饋電與外接設備功耗;
6. 接里程計,使用車載模型;
7. 使用高速通信接口。 * 選配
審核編輯 黃宇
-
定位
+關注
關注
5文章
1347瀏覽量
35499 -
導航系統(tǒng)
+關注
關注
2文章
267瀏覽量
30806 -
無人駕駛
+關注
關注
98文章
4089瀏覽量
121004
發(fā)布評論請先 登錄
相關推薦
無人駕駛的GNSS系統(tǒng)中高精度定位定向模組M22如何實現(xiàn)定位導航

無人機的GNSS導航系統(tǒng)高精度定位定向模組M20D實現(xiàn)應急救援技術原理

基于加速度計的無陀螺慣性導航系統(tǒng)的研究
無人駕駛導航平臺
深度解析慣性導航和GPS衛(wèi)星導航結合的應用
車載終端的導航定位標準以及導航定位射頻性能測試系統(tǒng)和測試項目介紹
詳解GPS導航系統(tǒng)中的慣性技術
慣性導航模塊特征和 優(yōu)勢有哪些?
無人機的GNSS導航系統(tǒng)高精度定位定向模組M20實現(xiàn)應急救援技術原理

M21 高精度定位定向imu慣性組合導航模組
GNSS中高精度定位定向模組M20助力自動駕駛車輛精準定位
GNSS中高精度定位定向模組M20助力自動駕駛車輛精準定位

高精度GNSS定位定向模組M20D實現(xiàn)無人配送車導航定位的原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論