 位置傳感器及編碼器關鍵術語,如何選擇合適的位置傳感器
位置傳感器及編碼器關鍵術語,如何選擇合適的位置傳感器
傳感器廣泛用于自動化和測量應用中。選擇合適的傳感器的關鍵步驟是了解傳感器尺寸,分辨率,可重復性,精度,安裝約束和環境堅固性的要求。
位置傳感器關鍵術語
增量式傳感器
僅提供位置更改信息,以便在啟動時實際位置未知。每轉一次索引/標記信號定義設備的零位或零位。在歸航程序中檢測到。對于無刷電機的換相,電機通常有三個磁性霍爾傳感器,為磁場的初步對準提供粗略的絕對位置信息。增量傳感器通常體積小、精度高、性價比高。
絕對傳感器
提供一轉內或線性行程范圍內的實際物理位置。電機不需要霍爾,只有在運動范圍超過一轉的情況下,才需要對旋轉應用進行歸位。傳感器通常比增量設備更大,更昂貴。
多轉
旋轉設備,傳感器可提供多轉的實際位置。可以完全消除歸航。多回轉設備具有內部齒輪裝置,是最龐大,最昂貴的解決方案。
分辨率
定義可以移動或測量的最小位置增量,通常以“計數”表示。高性能伺服系統需要高分辨率。定位系統在兩個計數之間“抖動”,因此分辨率越高,抖動越小。分辨率對低速時的速度波動也有重大影響。由于速度是從位置反饋中得出的,因此,如果分辨率較低,則樣本中的數據可能不足以準確得出速度。在高速下,高分辨率設備可以生成超出控制器或伺服驅動器跟蹤能力的數據速率。
插值
可以看出,許多傳感器都會產生正弦和余弦信號。這些信號的周期由設備固有的“螺距”定義。利用sin/cos信息,理論上可以通過計算信號比率來獲得無限分辨率。此技術稱為插值。實際上,sin/cos信號的保真度和信噪比限制了可實現的分辨率。
準確性
定義每個測量位置與實際物理位置的距離。精度在很大程度上是系統問題,并且可能會受到偏心率,直線度和平面度等機械誤差的影響。傳感器誤差包括基音(線性)的非累積隨機變化,基音誤差(斜率)的累積以及內部sin/cos信號保真度的變化。精密機器制造商通常通過偏移量查找表來校準誤差。
重復性
定義當系統多次返回相同的物理位置時的測量位置范圍。可重復性比絕對精度更重要。為了有效地校準系統誤差,使每個位置讀數保持一致很重要。傳感器遲滯(不同的讀數取決于測量位置的接近方向)是可重復性的重要因素。
模塊化
旋轉反饋裝置的最常見形式被封裝在帶有內部軸承的外殼和通過柔性聯軸器連接到電機的軸上。外殼有一系列的密封等級,體積龐大模塊化裝置沒有外殼或軸承,必須內置在機械系統中。它們明顯更緊湊,但可能需要一個更友好的環境,這取決于技術。
開/關軸
對于旋轉應用,傳感器典型地位于圍繞旋轉軸線的秤的圓周上的離軸。當徑向空間受到約束時,一些實現將傳感器定位在軸最小化的尺寸上。
盡管非接觸式傳感器有發展趨勢,但電位計(“電位器”)仍廣泛用于低端應用中。電位計測量觸點沿電阻軌道滑動時的電壓降。它們有旋轉,線性或曲線形式,通常緊湊而輕便。一個簡單的設備將花費幾分錢,而更高精度的設備則可能花費200美元以上。通過激光修整電阻軌跡,可以使線性度小于0.01%。
電位器最適合在良性環境中具有低占空比的低性能應用中使用。它們易受磨損和灰塵或沙粒等異物的影響。電位計理論上具有無限分辨率,但實際上分辨率僅限于模數轉換器(ADC)接口和整個噪聲環境。
優點:低成本;簡單;緊湊;輕便。可以做到準確
弱點:磨損;振動;污染,極端溫度。
位置傳感器-透射式光學編碼器
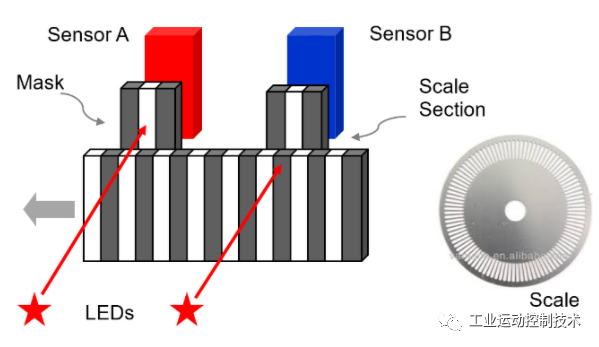
透射編碼器使用由LED光源照明的細光柵或“標尺”的光學掃描。旋轉或線性刻度尺由透明和不透明的“線”制成,它們以50至50的占空比排列。光盤上透明區域的數量與比例尺間距相對應,比例尺間距定義了編碼器的分辨率。
傳感器產生與入射光強度成比例的電壓。當傳感器相對于刻度移動時,電壓呈正弦變化。將第二個光檢測器異相添加90°。這涉及一半刻度線的位移。來自傳感器A的信號是否領先傳感器B或反之亦然,它定義了相對運動的方向。編碼器輸出可以是正弦/余弦信號,但信號通常會轉換為方波:四邊形B(四邊形與90°相移有關)。控制器檢測每個方波邊緣上的過渡,從而將編碼器分辨率有效提高4倍。
與每條線的寬度相比,檢測器往往更大。在較高的分辨率下,這可能導致通道之間的溢出。添加與通道模式匹配的遮罩有助于清理信號。這種設計的權衡之處在于,標尺和傳感器之間的氣隙必須非常小,對圓盤參數(例如平整度,偏心率和對準)施加嚴格的規范,使設備更容易受到沖擊和振動。
相控陣增量式編碼器使用固態技術來提供更強大的解決方案。相控陣編碼器不是每個通道的離散檢測器,而是具有檢測器陣列,因此每個通道都被多個檢測器覆蓋。這種方法可以平均光信號,從而最大程度地減少由制造誤差(例如光盤偏心率和未對準)引起的變化,在降低制造公差的同時提高性能。
編碼器本質上是增量式的,通常具有一條帶有單個透明線和獨立傳感器的附加刻度軌道。傳感器生成一個索引信號,定義設備的空位置。透射編碼器的絕對版本包含多個軌跡,光源和傳感器,它們完全確定了旋轉中的位置。通過將一個圓盤機械傳動到第二個圓盤,可以定義多轉的位置。
優點:中等分辨率;準確性好;高重復性,劃算的。
弱點:笨重;模塊化設備的環境堅固性。
光學編碼器–反射式
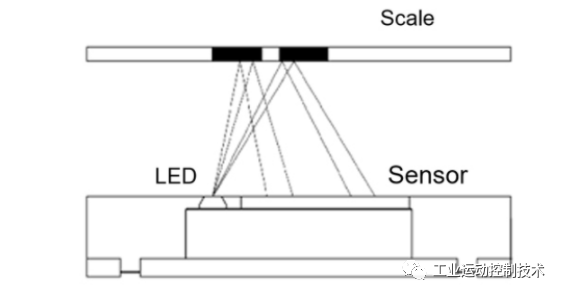
反射光學編碼器的原理與透射編碼器非常相似。反射式編碼器通過從與傳感器相同的一側(相對于代碼盤)發射光,并有選擇地將光的一部分反射到傳感器來工作。減小物理尺寸是該解決方案的明顯優勢。無需透射式編碼器中通常需要的準直光學器件,并且LED光源與傳感器在同一側,可以大大減少編碼器的總體積。分辨率和精度通常不如透射編碼器。
優點:中等分辨率和準確性,高重復性;成本效益高
弱點:環境堅固性
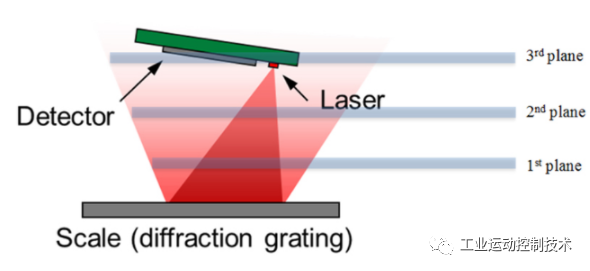
一個相干激光源產生發散光束,該發散光束照亮印在標尺上的衍射光柵圖案。使用玻璃刻度尺上的鉻沉積或金屬膠帶刻度尺上的激光寫入線來創建光柵圖案。20μm的節距光柵使光發生衍射,從而產生高對比度的明暗干涉圖樣,直接回到檢測器陣列上。本質上是增量地,通常提供第二索引/標記軌道。
衍射光會產生離散的Talbot平面干涉圖。在3以上的例子RD塔爾博特平面被利用。隨著標尺和檢測器的相對位置發生變化,衍射圖樣會在檢測器陣列上平移,從而導致每個檢測器單元中出現正弦變化。
干擾技術需要最少的光學組件,從而可實現小尺寸傳感器。在沒有插值的情況下,分辨率通常比透射或反射式光學編碼器高出多個數量級。由于正弦和余弦信號的保真度,可以進行高插值,從而以高精度產生納米分辨率。考慮到設備的精度,對對準公差的要求不是很高。
此類編碼器需要清潔的環境。采用相干性較低的LED光源,并與準直和濾波光學器件相結合,可顯著提高抗污染能力。編碼器不可避免地更大,并且通常具有更嚴格的對齊公差。有關更多詳細信息,
優點:高分辨率,準確性,可重復性;緊湊;適中的對準公差
弱點:Talbot飛機實施的環境堅固性。
光學編碼器的絕對技術
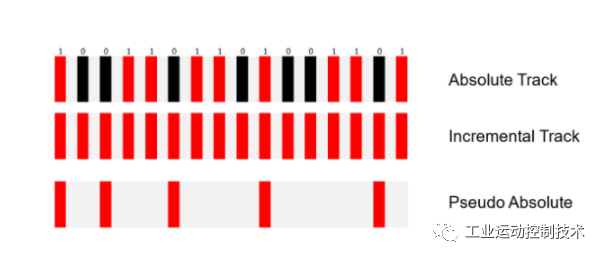
上面顯示的絕對比例具有類似于條形碼的多個代碼。代碼位數確定唯一代碼的數量,從而確定刻度尺的最大長度或周長。照相機捕獲代碼,隨后的處理確定絕對位置。此技術會增加等待時間(獲得閱讀的時間)。某些編碼器在初始絕對讀數后恢復為增量軌道,以減少延遲。
條形碼技術可能很昂貴。更具成本效益的解決方案采用了實質上是多個索引的方法。如在增量磁道上看到的那樣,每對索引由唯一數量的行分隔。在啟動時,有必要引起運動,以便檢測到兩個索引。在此過程中,將對增量軌道上的行數進行計數。使用查找表可以確定絕對位置。缺點是在確定絕對位置之前需要移動。
優點:良好的分辨率,準確性,可重復性;適中的對準公差
弱點:環境堅固性;對于真正的絕對來說可能會很昂貴。
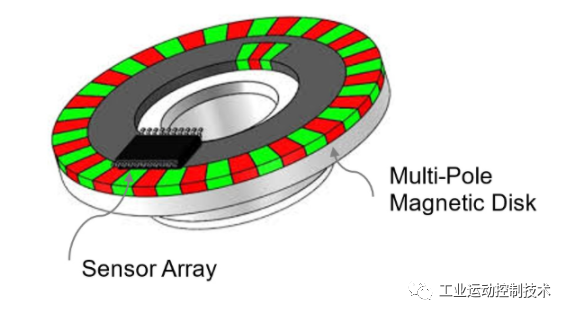
磁性編碼器
磁編碼器采用多極磁道。當磁極相對于傳感器移動時,傳感器(霍爾效應或磁阻傳感器)測量磁通量的變化。可以像在光學編碼器中一樣生成正弦和余弦信號。
磁阻電阻器由諸如鎳鐵的磁敏合金形成。外部磁場會對材料的磁疇施加壓力,從而改變電阻。磁阻傳感器由光刻圖案化的薄膜電阻器陣列組成。當轉子磁極經過傳感器陣列時,電阻呈正弦變化。
霍爾傳感器由連接至電源的一層半導體材料(通常為p型)組成。施加的磁場在電荷載流子上施加一個力(洛倫茲力),使它們分開以產生電勢差。霍爾傳感器產生的電壓取決于磁場垂直分量的強度。
該設備本質上是增量式的,上面的插圖顯示了用于定義空位置的索引軌道。可以添加第二個傳感器和磁極數不同的磁道。來自每個軌道的讀數的組合用于確定絕對位置。
電磁編碼器堅固耐用,結構緊湊并且非常經濟。但是,它們容易受到磁場的影響,并且在附近的傳感器之間可能會發生串擾。很難產生細間距的磁道限制分辨率。在工作溫度范圍內,磁滯和精度變化會損害可重復性。磁道比較脆,容易受到沖擊。
優點:強大的;緊湊;耐受液體和非金屬污染物;同軸版本
弱點:溫度;磁滯易受磁場影響;耐沖擊/沖擊。
電容編碼器
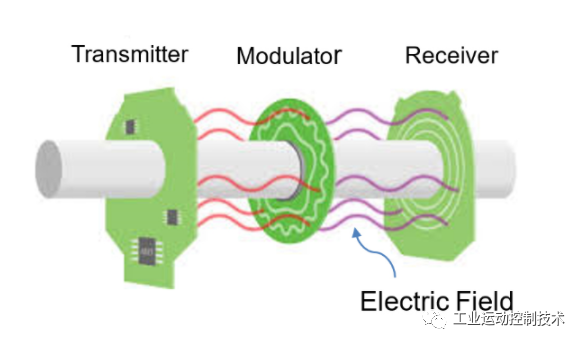
電容式編碼器基于以下原理:電容與兩個帶電板之間的辯證材料成正比。如圖所示,在電容耦合的發射器和接收器之間會產生電場。轉子以正弦形式調制電介質?,從而引起電容變化。電容的變化又調制了發射器和接收器之間的電勢差。采用多個調制軌道來定義絕對位置。
電容式編碼器結構緊湊,功耗極低。但是,它們易于凝結和靜電積聚。電容也會隨溫度,濕度,周圍材料和異物而變化,這使得工程穩定,高精度的位置傳感器面臨挑戰。設備的組件有很小的氣隙,需要仔細安裝。
優點:緊湊;低功率。
弱點:環境堅固性;對齊公差。
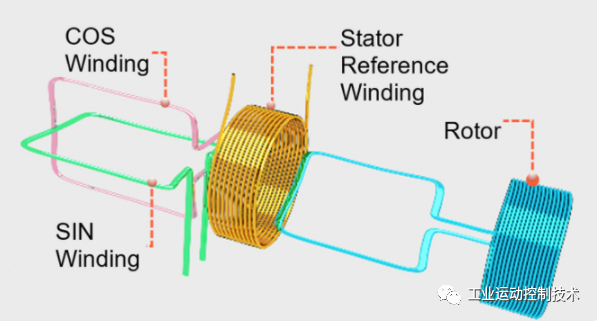
旋轉變壓器基于電磁感應原理,一根導體中的交流電會在導體周圍產生變化的磁場。該磁場可在相鄰導體中感應出交流電。從一個導體到另一導體的耦合的大小取決于磁場的變化率以及導體的相對位置和幾何形狀。
如下圖所示,定子中的5kHz(典型值)正弦參考電壓會在轉子繞組中感應出正弦電壓。然后,第二個軸向轉子繞組在兩個軸向信號繞組中感應出一個電壓,這些信號繞組在定子上向后偏移90o。如圖所示,耦合到定子繞組中的量是轉子相對位置的函數,轉子有效地對定子信號進行幅度調制。
為了清楚起見,在上面的圖示中,轉子顯示在定子外部。定子上的徑向繞組僅與轉子上的徑向繞組相互作用。進而,轉子上的軸向繞組僅與定子上的軸向繞組相互作用。這是為了避免定子參考繞組耦合到定子信號繞組。纏繞旋轉變壓器并非易事,最終結果是設備笨重。但是,旋轉變壓器確實具有無與倫比的堅固性,因為設備中沒有電子設備或易碎部件。
旋轉變壓器有多種“速度”可供選擇。單速旋轉變壓器每轉具有一個電正弦波周期,并以有限的分辨率提供絕對位置信息。每轉可卷繞“多速旋轉變壓器”,以獲得更高的電循環次數,從而提高分辨率。電氣循環與機械循環的比率較高,也有助于最小化機械誤差源的影響。多速旋轉變壓器不再是絕對的,而且價格更高,而且通常更笨重。
優點:中等分辨率和準確性;可靠;極其堅固
弱點:昂貴;笨重;重。
感應編碼器
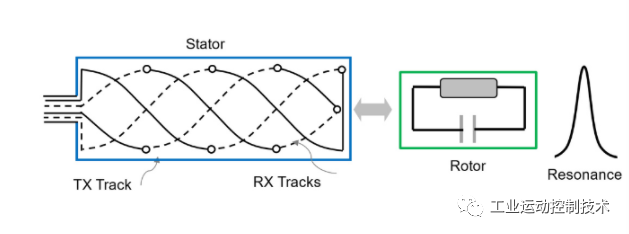
絕對感應編碼器基于與分解器相同的電磁感應原理,但使用PCB走線而不是線圈繞組。定子上的TX磁道被1-10MHz范圍內的特定頻率激勵。該信號通過諧振LC電路感應耦合到目標中。目標磁場在定子RX磁道中感應出正弦電流。RX軌道為正弦曲線形狀,可有效地幅度調制感應信號。第二個RX軌道偏移90o,則承載余弦信號。正弦/余弦信號被插值并輸出為BiSS-C,SSI或某些版本的AqB信號。
定子上的RX軌跡類似于雙絞線。平衡偶極效應抵消了TX軌道上變化的磁場在RX軌道中感應的電場。RX軌道僅響應目標上變化的磁場。RX軌道還可以抑制外部電磁干擾。還會根據頻率和相位拒絕不希望的感應定子電流。
每轉具有一個sin/cos周期的主要RX磁道定義了絕對位置。具有多個循環的輔助軌道可提高分辨率。更典型的是,主TX軌跡具有多個周期(例如9個),而輔助軌跡則具有多個周期,而不是3的倍數–一個轉速內的每個位置都由兩個唯一的讀數定義。
使用PCB走線與旋轉變壓器繞組相比具有明顯的優勢,包括:降低成本,尺寸和重量;形狀靈活性,包括曲線;消除纏繞過程中的誤差;對于安全相關應用,可以使用多層電路板將多個傳感器放置在同一空間中。
PCB材料在環境上非常穩定。遠程電子設備的選件進一步提高了耐用性。360o傳感器提高了偏心誤差容限。
優點:中等精度和分辨率;可靠;強大的;多種幾何形狀;緊湊;輕巧的
弱點:典型的最小直徑是37毫米。
位置傳感器–技術比較
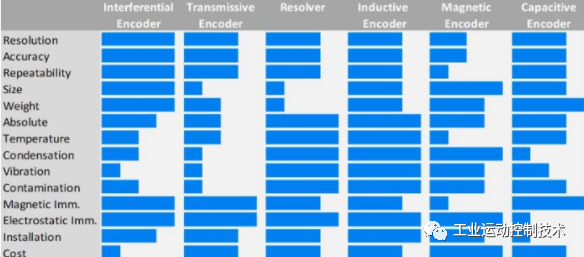
位置傳感器/位置反饋設備的比較如下所示。反射編碼器可以被認為類似于透射編碼器。電位器屬于接觸設備,因此不包括在內。
位置傳感器的技術比較
最終目標是找到滿足精度,尺寸和耐用性要求的最具成本效益的解決方案。從上表中可以看出兩點:在精度和尺寸方面,干涉編碼器無疑是領先者;旋轉變壓器和電感式編碼器具有環境堅固性和中等精度的優勢。如上所述,與旋轉變壓器相比,電感式編碼器具有許多優勢,特別是尺寸和重量。
-
傳感器
+關注
關注
2553文章
51390瀏覽量
756572 -
編碼器
+關注
關注
45文章
3667瀏覽量
135237 -
自動化
+關注
關注
29文章
5622瀏覽量
79661 -
測量
+關注
關注
10文章
4938瀏覽量
111812
發布評論請先 登錄
相關推薦
簡單認識線性位置傳感器
淺談如何選擇合適的傳感器
如何選擇合適的光纖傳感器
46圈,16,560°!什么樣的位置傳感器能做到!

凸輪軸位置傳感器與曲軸傳感器的區別
凸輪軸位置傳感器故障診斷 如何選擇凸輪軸位置傳感器
編碼器在機器人技術中的應用 編碼器在傳感器系統中的作用
位置傳感器的類型和用途是什么
磁電式編碼器磁鐵怎么固定的
電磁式傳感器的安裝位置
Renesas永磁同步電機無位置傳感器算法介紹

TIDA-060040-帶有用于精確電機位置控制的霍爾效應傳感器的絕對角度編碼器 PCB layout 設計






 工商網監
工商網監
評論