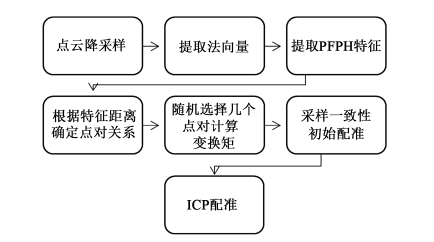
 三維點云配準過程詳解:算法原理及推導
三維點云配準過程詳解:算法原理及推導
本文將對三維點云配準過程中的算法原理及必要推導流程進行詳解。
01點云配準過程
就是求一個兩個點云之間的旋轉平移矩陣(rigid transform or euclidean transform 剛性變換或歐式變換),將源點云(source cloud)變換到目標點云(target cloud)相同的坐標系下。
可以表示為以下的方程:

其中
 就是target cloud與source cloud中的一對對應點。
就是target cloud與source cloud中的一對對應點。
而我們要求的就是其中的R與T旋轉平移矩陣。
這里,我們并不知道兩個點集中點的對應關系。這也就是配準的核心問題。
02
配準分為粗配準與精配準兩步
粗配準就是再兩個點云還差得十萬八千里、完全不清楚兩個點云的相對位置關系的情況下,找到一個這兩個點云近似的旋轉平移矩陣(不一定很精確,但是已經大概是對的了)。
精配準就是在已知一個旋轉平移的初值的情況下(這個初值大概已經是正確的了),進一步計算得到更加精確的旋轉平移矩陣。
這里從精配準開始講起。
精配準的模式基本上已經固定為使用ICP算法及其各種變種。ICP算法由Besl and McKay 1992, Method for registration of 3-D shapes文章提出。
文中提到的算法不僅僅考慮了點集與點集之間的配準,還有點集到模型、模型到模型的配準等。
簡要介紹一下點集到點集ICP配準的算法:
1) ICP算法核心是最小化一個目標函數:

(這里的表述與原文略微有些不同,原文是用四元數加上一個偏移向量來表達旋轉平移變換。)
 就是一對對應點,總共有
就是一對對應點,總共有 對對應點。這個目標函數實際上就是所有對應點之間的歐式距離的平方和。
對對應點。這個目標函數實際上就是所有對應點之間的歐式距離的平方和。
2) 尋找對應點
可是,我們現在并不知道有哪些對應點。因此,我們在有初值的情況下,假設用初始的旋轉平移矩陣對source cloud進行變換,得到的一個變換后的點云。
然后將這個變換后的點云與target cloud進行比較,只要兩個點云中存在距離小于一定閾值(這就是題主所說的ICP中的一個參數),我們就認為這兩個點就是對應點。這也是"最鄰近點"這個說法的來源。
3) R、T優化
有了對應點之后,我們就可以用對應點對旋轉R與平移T進行估計。這里R和T中只有6個自由度,而我們的對應點數量是龐大的(存在多余觀測值)。因此,我們可以采用最小二乘等方法求解最優的旋轉平移矩陣。一個數值優化問題,這里就不詳細講了。
4) 迭代
我們優化得到了一個新的R與T,導致了一些點轉換后的位置發生變化,一些最鄰近點對也相應的發生了變化。
因此,我們又回到了步驟2)中的尋找最鄰近點方法。2)3)步驟不停迭代進行,直到滿足一些迭代終止條件,如R、T的變化量小于一定值,或者上述目標函數的變化小于一定值,或者鄰近點對不再變化等。(這里也是題主所說的ICP算法中的一個參數)
算法大致流程就是上面這樣。這里的優化過程是一個貪心的策略。首先固定R跟T利用最鄰近算法找到最優的點對,然后固定最優的點對來優化R和T,依次反復迭代進行。
這兩個步驟都使得目標函數值下降,所以ICP算法總是收斂的,這也就是原文中收斂性的證明過程。這種優化思想與K均值聚類的優化思想非常相似,固定類中心優化每個點的類別,固定每個點的類別優化類中心。
關于參數的選擇:
ICP算法的參數主要有兩個。一個是ICP的鄰近距離,另外一個是迭代的終止條件。這些參數的選擇,與實際的工程應用相關。比如說你的儀器精度是5mm,那么小于5mm是可以認為是對應點,而最終的迭代終止條件也就是匹配點之間平均距離小于5mm。
而且這些參數可以由算法逐步迭代減小,最初使用較大的對應點距離參數,然后逐步減小到一個較小的值。(實際過程中這樣操作會比較合適。)需要手動調整一些參數。(這跟機器學習調參比起來,簡直不是事~)
03
粗配準
前面介紹到了,ICP算法的基本原理。它需要一個旋轉平移矩陣的初值。這個初值如果不太正確,那么由于它的greedy優化的策略,會使其目標函數下降到某一個局部最優點(當然也是一個錯誤的旋轉平移矩陣)。因此,我們需要找到一個比較準確的初值,這也就是粗配準需要做的。
粗配準目前來說還是一個難點。針對于不同的數據,有許多不同的方法被提出。
我們先介紹配準的評價標準,再在這個標準下提出一些搜索策略。
評價標準:比較通用的一個是LCP(Largetst Common Pointset)。給定兩個點集P,Q,找到一個變換T(P),使得變換后的P與Q的重疊度最大。在變換后的P內任意一點,如果在容差范圍內有另外一個Q的點,則認為該點是重合點。重合點占所有點數量的比例就是重疊度。
解決上述LCP問題,最簡單粗暴的方法就是遍歷。假設點集P,Q的大小分別為m,n。而找到一個剛體變換需要3對對應點。
那么brute force 搜索的需要 的復雜度。對于動輒幾百萬個點的點云,這種時間復雜度是不可接受的。
的復雜度。對于動輒幾百萬個點的點云,這種時間復雜度是不可接受的。
因此,許多搜索策略被提出。比較容易想到的是RANSAC之類的搜索方法。而對于不同的場景特點,可以利用需配準點云的特定信息加快搜索。(例如知道點云是由特定形狀的面構成的)這里先介紹一個適用于各種點云,不需要先驗信息的搜索策略,稱為4PC(4 Point Congruent)。
搜索策略:4PC搜索策略是在P,Q中找到四個共面的對應點。
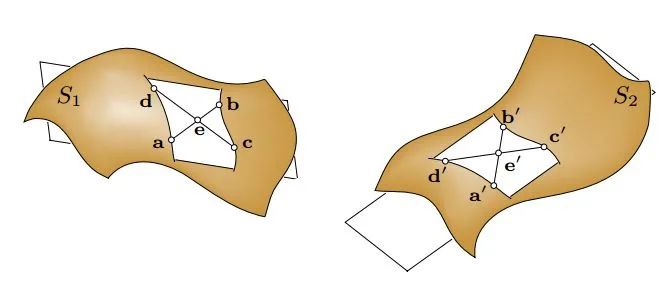
如上圖所示(來自4PC原文),這四個共面的點相交于e。這里有兩個比例在剛體變化下是不變的。(實際上在仿射變換下也是不變的)


而4PC將對于三個點的搜索轉換為對e,e'的搜索,從而將復雜度降低到了 。
。
這四個點的距離越遠,計算得到的轉換越穩健。但是這里的四個點的搜索依賴于兩個點云的重疊度。
具體的算法可以參考4-Points Congruent Sets for Robust Pairwise Surface Registration的原文。
4PC算法通用性較好,但是對于重疊度較小、或是噪聲較大的數據也會出現配準錯誤或是運行時間過長的問題。針對于不同的場景很多其他的搜索策略也被提出。
舉例說明,對于室外地面站LiDAR獲取的點云配準問題。這種情形下,由于掃描儀內有自動安平裝置,Z軸都是豎直方向(重力方向),剛體變換只存在三維平移與平面(XoY面上的)旋轉。我們就在場景中搜索豎直的特征線并且得到它們與地面的交點。
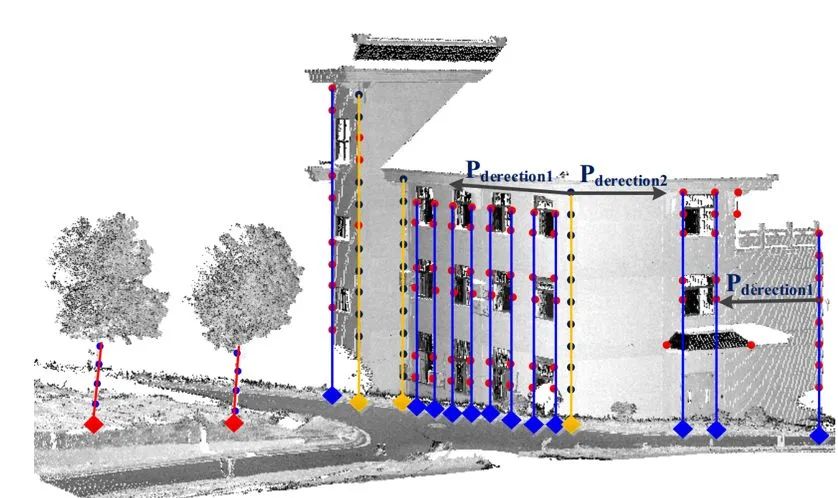
再將這些交點構建出三角形,以三角形的全等關系來得到匹配。
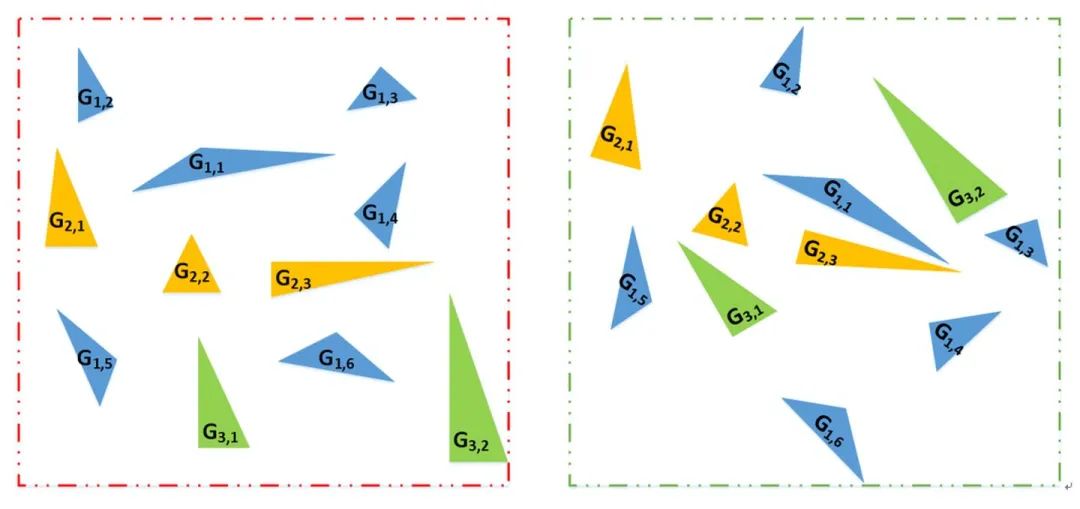
找出其中一致性最好的三角形集合,作為匹配的集合,進行粗配準。
這種方法適用于豎直線較多的場景,比如城區的建筑物的邊線、林區樹木的樹干等。設計的方法還是很巧妙的。當然如果場景內這種特征較少,就比較難以配準。
-
算法
+關注
關注
23文章
4630瀏覽量
93356 -
三維
+關注
關注
1文章
512瀏覽量
29041 -
點云
+關注
關注
0文章
58瀏覽量
3822
原文標題:干貨丨三維點云配準過程詳解:算法原理及推導
文章出處:【微信號:gh_c87a2bc99401,微信公眾號:INDEMIND】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于二維激光測距儀的三維模型配準研究
一種快速的三維點云自動配準方法
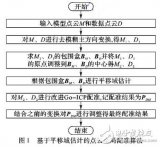
基于平移域估計的點云全局配準算法
基于分層策略的三維非剛性模型配準算法

使用PCL進行點云數據粗配準算法的研究資料分析







 工商網監
工商網監
評論