 毫米波雷達進入集中處理的時代
毫米波雷達進入集中處理的時代
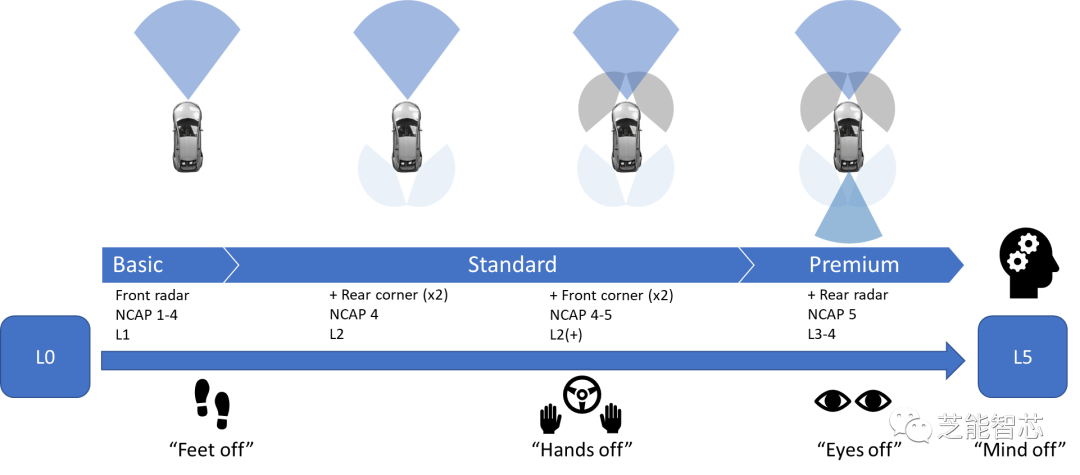
在智能駕駛領域,毫米波雷達技術一直處于不斷革新的前沿。隨著車輛自動輔助駕駛要求和安全性要求的提高,感知系統也在不斷進步。車企正從獨立功能的分布式架構轉向功能集成的域控制架構,甚至融合域架構。不同車輛功能將集成到更高級別的控制單元中,以提高效率、協同性和降低成本。汽車電子電氣架構可能向中央計算+區域控制的中央集中式架構演進,允許主要計算能力集中在中央處理單元,同時利用區域控制單元處理特定功能和感知任務。
、
隨著芝能汽車開始導入中央計算單元,其性能預計將快速增長,感知數據處理可以以更有效的方式執行,從而導致EE架構快速迭代演進。毫米波雷達模塊的數據處理將從邊緣計算向離域處理(離散的、分布式的數據處理)轉變,實現更高效的計算。每個模塊或控制單元中的處理量將由所需的性能和可用的架構決定。
這和攝像頭演進的思路是一致的,毫米波雷達也可以實現類似的架構演變:
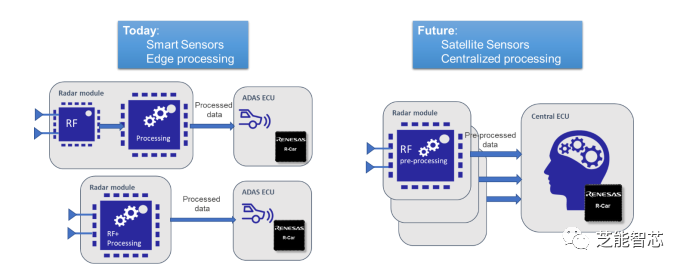
●傳統設計:分離式芯片方案,將RF射頻前端處理芯片與算力芯片整合為單獨雷達ECU和集中智能駕駛計算平臺交互(每個模塊都有自己的雷達收發器,并且能夠使用單個芯片或同一模塊上的單獨微控制器或SoC來處理板上檢測到的數據)
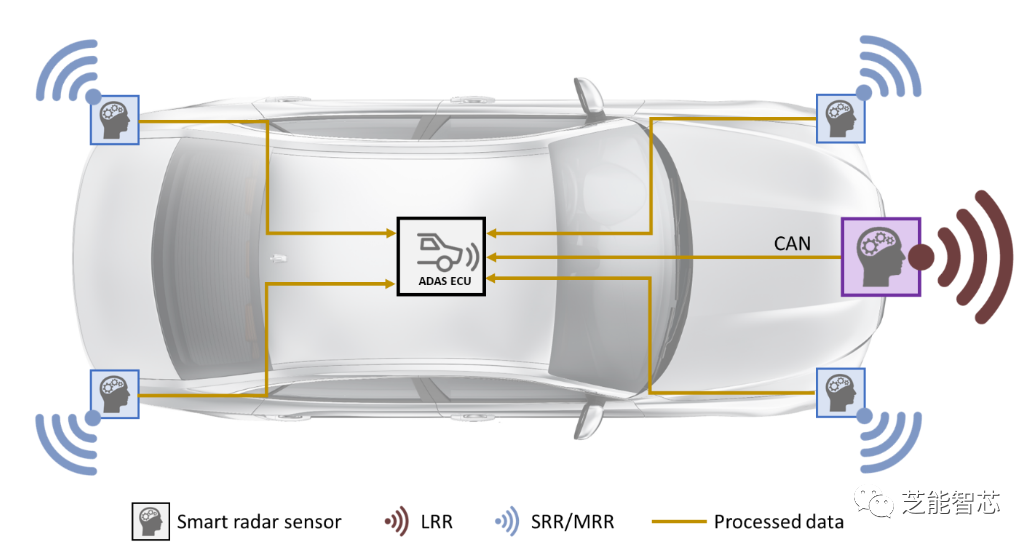
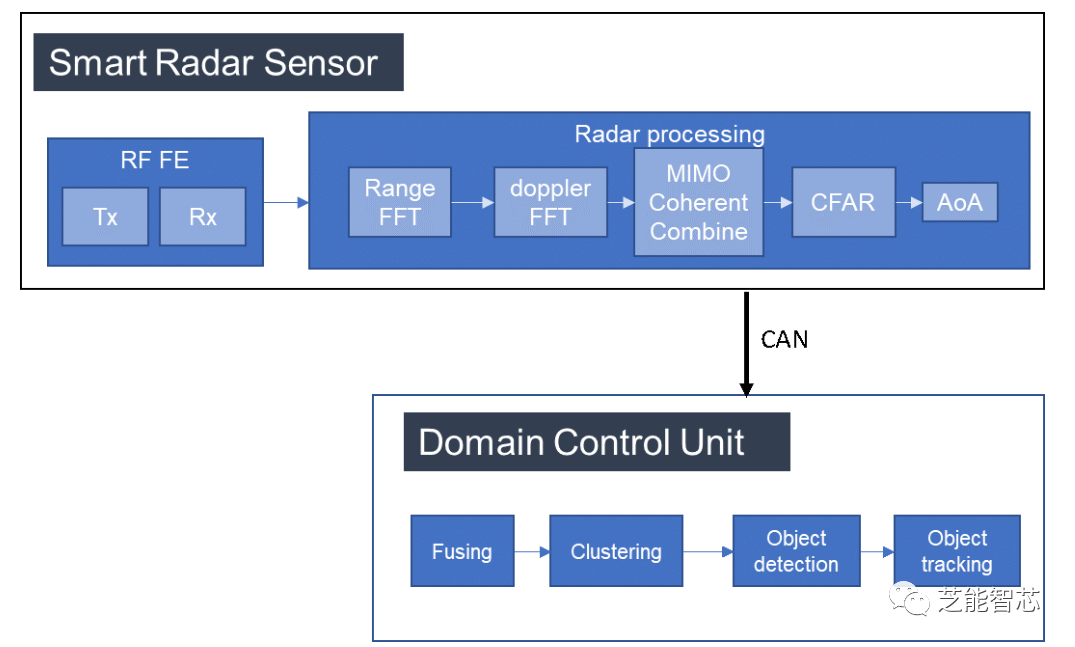
●集中式設計:集成芯片式方案,將RF射頻前端芯片和算力模塊集成為單獨雷達ECU和集中智能駕駛計算平臺交互。處理后的毫米波雷達數據然后從每個“智能雷達傳感器”傳輸到遠程域控制單元,以便使用CAN總線進行進一步處理和融合。使用足夠多的傳感器,車輛可以識別周圍環境中的障礙物。接收前視遠程雷達以及來自四個角近程和中程雷達檢測到的物體的信息,以創建物體的完整圖像。
隨著集中式計算架構的引入,毫米波雷達模塊的數據處理可能會趨向本地化。雷達模塊本身將變得不那么“智能”,而衛星雷達單元將能夠對接收到的雷達信號執行有限的處理,例如FFT,然后再將數據傳輸到中央計算平臺,將接收來自不同衛星雷達模塊的預處理數據,并對每組數據執行主要的雷達處理步驟。這樣的架構優勢在于節省了尺寸和成本,同時提供了更高效的數據處理和融合。
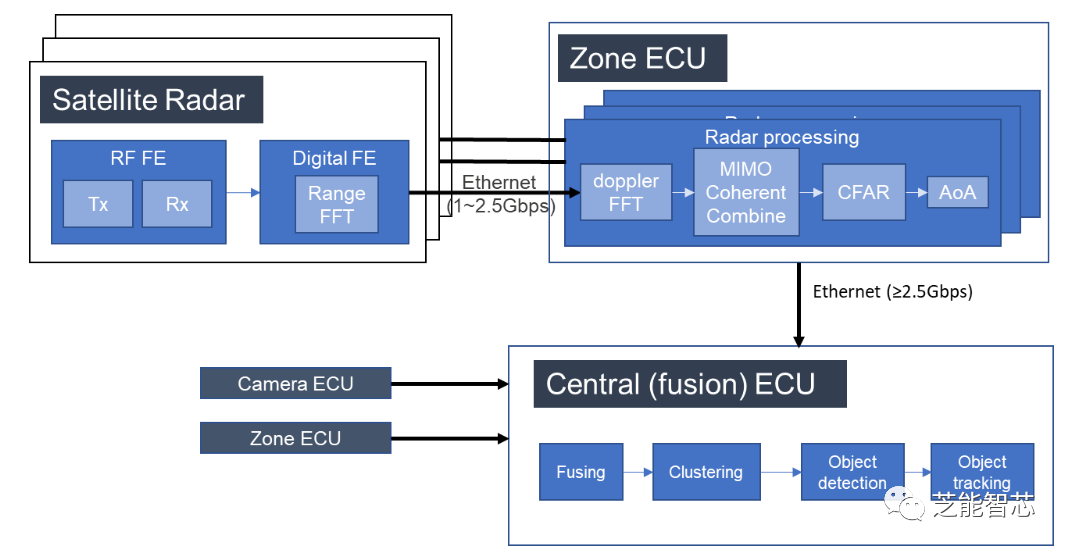
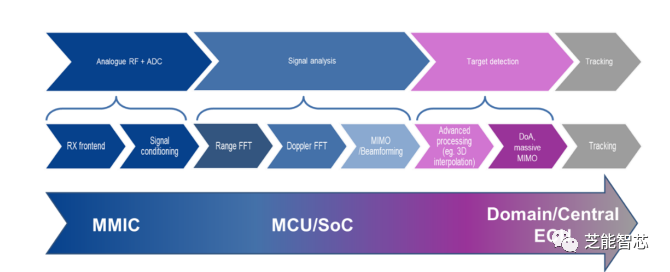
備注:核心是多維FFT的轉換、CFAR、窗函數等的處理,以及最終的點云跟蹤。處理結果可以進行數據融合,提高檢測和環境感知的準確性
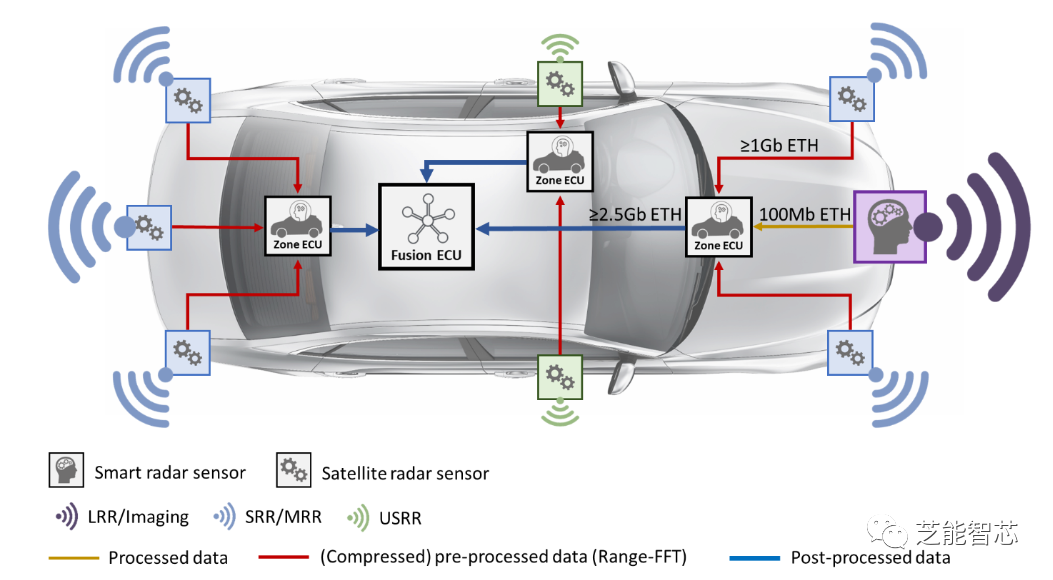
在這種帶有衛星雷達模塊的集中式架構中,數據將使用車輛的以太網骨干網傳輸到ECU。使用車輛的控制單元進行處理不僅可以更有效地處理雷達數據,而且可以進行更復雜的操作。與攝像頭或激光雷達等其他傳感器、機器學習和人工智能的數據融合現在可用于優化環境的傳感和表征,這將有助于實現更高水平的自動駕駛。
●主要優勢
◎優化產品機械結構,節省尺寸和成本,便于維修和升級,減少散熱問題。
◎優化產品線纜,通過車輛骨干網絡傳輸數據,降低線纜成本和重量。
◎實現軟硬分離和解耦,便于更換硬件廠商和雷達算法的OTA升級。
◎在中央集成式架構下,利用更高級的算法實現多雷達之間的融合,推進雷達和相機的前融合方案。
●面臨挑戰
◎大數據量處理增加了域控制器端的硬件成本。
◎主流高算力芯片對雷達算法的支持和兼容性需要提高。
◎OEM對衛星雷達的認可度較低,需要更多實際案例推動市場認知。
◎OEM主要以目標級別數據為主,對直接ADC數據的使用存在技術難度。
結論:以后毫米波雷達就是一個芯片和組裝的工作,這也是最終軟件來實現差異化的。
-
adc
+關注
關注
99文章
6533瀏覽量
545760 -
算法
+關注
關注
23文章
4630瀏覽量
93358 -
毫米波雷達
+關注
關注
107文章
1054瀏覽量
64543
原文標題:毫米波雷達進入集中處理的時代
文章出處:【微信號:QCDZSJ,微信公眾號:汽車電子設計】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論