 人工智能技術在水聲通信中的研究進展
人工智能技術在水聲通信中的研究進展
來源:溪流之海洋人生
作者:陳友淦 許肖梅
多年來,從非相干水聲通信到相干水聲通信,直擴、跳頻、OFDM、Turbo均衡、時間反轉和自適應等各種理論和技術均被引入水聲通信中,以期克服復雜多變海洋環境對水聲通信信號的影響。但是,目前仍無法研制出一種能適用于各類海洋環境、可滿足通用水聲業務誤碼率、速率和距離等需求的水聲通信機,更難以進行大規模水聲通信組網應用、實現穩健可靠的海洋物聯網。一個重要原因是,海洋環境大動態變化引起的水聲信道復雜時-空-頻變特性,使得傳統各種理論和技術仍難以實時、合理、有效地與之進行良好的自適應匹配設計。近年來,人工智能技術在無線通信、大氣、教育、醫療、金融和社會決策等各領域的快速發展,為突破水聲通信所面臨的傳統技術瓶頸帶來新思路。本文將對國內外人工智能技術在水聲通信物理層和網絡層中的應用探索進行梳理和總結。
一、人工智能技術
1956年,計算機科學家在達特茅斯會議提出了“人工智能”概念,其初衷在于利用機械工具代替人類進行某些簡單枯燥的工作。隨著機器學習、深度學習等人工智能一些子集的迅速發展,尤其是2015年以來,人工智能開始大爆發,主要原因有:①算力條件大幅提升,高性能GPU的廣泛應用使得并行計算變得更快、更便宜、更有效,深度學習取得突破;②大數據的發展,無限拓展的存儲能力和大數據的組合,使得圖像數據、文本數據、交易數據、映射數據等全面海量爆發。深度學習作為機器學習中的一個新方向,其以更逼近人工智能的方式成為當前最主流的人工智能技術,是當今人工智能大爆炸的核心驅動。
圖1給出了人工智能、機器學習和深度學習的發展關系。人工智能的研究經歷了“推理-知識-學習”的不同發展階段,機器學習是實現人工智能的一個重要途徑。作為人工智能的一個重要分支,機器學習理論主要是設計和分析讓計算機可自主“學習”的算法,即從數據中自動分析獲得規律,并利用規律對未知數據進行預測的算法。按學習方式分,機器學習可分為:監督學習、非監督學習、半監督學習和強化學習。按算法分類,則可分為回歸算法、決策樹學習、貝葉斯方法、支持向量機、聚類算法、遺傳算法、人工神經網絡、深度學習、降低維度算法和集成學習等。需要強調的是,由于機器學習的范圍非常龐大,有些算法很難明確歸類到某一類;而對于有些分類而言,同一分類的算法也可以針對不同類型的問題。

圖1 人工智能與機器學習、深度學習的關系
在人工智能的實現方式上,主要有計算機編程和模擬2種。目前,計算機編程僅能實現形式上的智能,而通過對人類或者某些生物的行為或思維方式的模擬則可以實現更高級的智能。例如,常見的直接受大自然啟發而產生的人工智能算法(啟發式算法)有:模擬退火、人工神經網絡、遺傳算法、進化規劃、集群智能、強化學習和人工免疫系統等。以模擬自然界為核心思路的人工智能算法,在優化問題等領域得到了廣泛應用,例如規劃路線、設計方案等。
二、水聲通信中的人工智能技術
根據人工智能技術發展的不同階段,其在水聲通信中的應用也由經典的智能算法(如模擬退火、集群智能中的蟻群算法等),逐步發展到強化學習中的Q-learning等機器學習算法,乃至深度神經網絡等深度學習算法。相關人工智能算法緊緊圍繞海洋環境動態變化、水聲信道物理特性而展開。
⒈水聲領域應用人工智能的主要思路
在水聲領域應用人工智能技術,主要思路是結合水聲信道窄帶寬、大時延、強多途、大起伏、大動態變化、高噪聲等固有的水聲物理特性,選擇合適的智能算法進行針對性地設計和改進,以求解決水聲通信及組網存在的以下幾個典型問題:
⑴水聲傳輸的吸收衰減與窄帶。
海水對聲波的吸收衰減隨頻率升高而指數上升,因此水聲通信的可用頻率帶寬很窄,通信速率低。比如,在幾十到100km的遠距離水聲通信系統中,可用帶寬不足1kHz。要想提高通信速率,就只能降低通信距離,這也是人工智能時代,在海洋物聯網框架下,研制高頻短距、寬帶高速和節能便攜水聲節點,實現大規模高速水聲通信組網觀測和數據交互的主要技術背景依據;現在有研究毫米波水聲通信技術(頻率用150kHz~1.5MHz),但通信距離短,僅為幾百米。
⑵水聲傳輸的大時延、強多途與時空不確定。
聲波在水中的低速傳播造成水聲數據傳輸的大時延特性,同一信號的聲波從不同路徑抵達接收端時的多途時延差異極為顯著,在不同海洋環境(空間)條件下、在不同時間條件下,從毫秒級、百毫秒級到秒級皆有可能,這種不確定的大時延擴展,給接收端數據處理和組網協議設計均帶來極大困難。同時,多途還會造成信號的某些頻率被增強而某些頻率被削弱的頻率選擇性衰落現象,且不同空間位置結果差異極大,空間選擇性衰落現象也極不確定。
為此,多途時延擴展是時空不確定條件下信道的時間擴展,水聲信道存在“大時延擴展不確定,強頻域起伏不確定”現象。
⑶水聲傳輸的多普勒、大起伏與時空不確定。
水下通信設備收發端之間由于波浪、湍流、潮汐等因素會不可避免地引起漂移,同時水下航行器也會有相對運動,該相對運動速度一般是每秒幾米數量級,而由于聲波在水中的低速傳播,兩者比值在10-2~10-3,多普勒頻移因子數量級約為10-3,因此,水聲數據傳輸的多普勒擴展效應顯著。同時,多普勒擴展還會造成信號的某些時刻被增強而某些時刻被削弱的時域包絡大起伏問題,即時間選擇性衰落現象,且不同海洋環境(空間)條件下、不同時間條件下,波浪、涌浪、湍流、內波的不確定性會造成多普勒擴展(頻率擴展)的不確定性。
為此,多普勒擴展是時空不確定條件下信道的頻率擴展,水聲信道存在“大頻率擴展不確定,強時域包絡起伏不確定”現象。
可見,水聲信道固有的時延-多普勒雙擴展現象均具有時空不確定性,這也是迄今為止水聲信道尚無統一的標準模型的原因。利用強化學習對水聲信道進行自適應學習,便于水聲通信系統參數設置,實現基于強化學習的自適應編碼調制,是人工智能技術突破水聲通信技術瓶頸的關鍵所在。
⑷海洋噪聲干擾嚴重。
海洋環境中的噪聲來源主要包括潮汐、洋流、海面波浪、地震活動、海洋生物群體和交通航運等等。由于聲波在水中傳播的共有屬性,這些噪聲的頻段往往與水聲通信設備所用頻段存在交叉重疊的現象。因此,水聲信號的接收信噪比往往比較低,這是利用深度神經網絡等人工智能技術解決水聲通信接收機信號處理難題的出發點。
⑸水聲通信網所需的高處理能力、低功耗、便攜的水聲節點研制需求。
應用于大規模水聲通信組網的節點長期部署在水下,對其充電或更換電池的成本極高,為此,在滿足高處理能力、便攜的前提下,低功耗是進行水聲節點接收機信號處理和水聲通信組網協議設計要考慮的重要因素。例如,在水聲通信組網協議中應用人工智能技術時,常把高性能指標作為約束條件,以功耗為代價函數,建立優化模型,通過集群智能、強化學習等人工智能技術,獲得最低功耗目標函數下的參數設置,作為網絡最優參數設置。
⑹水聲通信及組網的敏感性與保密性需求。
由于水聲通信及組網在社會、經濟、科學和軍事等方面均有重要應用價值,海洋物聯網框架下,海洋觀測中的水聲數據具有一定的敏感性和保密性。利用強化學習進行水聲物理層防攻擊認證、水聲網絡層防干擾攻擊等,均是人工智能技術在水聲通信及組網安全方面的有益探索。
⒉水聲領域應用人工智能相關算法
根據上述水聲信道特性和水聲數據傳輸特點,不少改進了的人工智能算法,已被嘗試應用于水聲通信的不同場景和目標。
圖2梳理了目前水聲領域應用人工智能相關算法的部分研究情況。
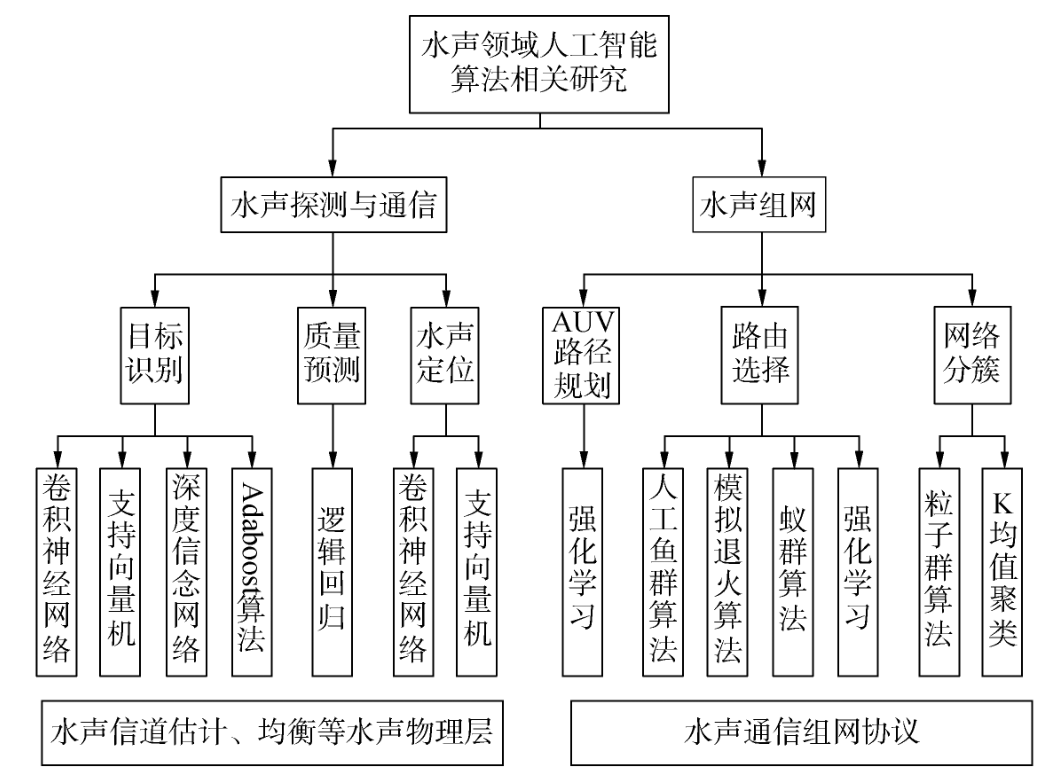
圖2 水聲領域人工智能算法相關研究
從應用對象看,人工智能技術在水聲通信中的應用可大致分為2類:①以水聲探測和節點間通信為主要應用場景的物理層方面,包括水聲目標識別、水聲定位、水聲信道估計、水聲信道均衡、水聲自適應調制、水聲通信質量預測等;②以水聲通信組網為主要應用場景的網絡層方面,包括以低功耗為主要目標的水聲網絡路由設計、網絡拓撲分簇、節點功率分配、AUV輔助的水聲數據搜集路徑規劃和水聲網絡安全等。
從時間角度看,2010年以前,水聲通信中應用人工智能技術的研究比較少,該階段人工智能算法通常被視為一種性能較好的優化算法而應用于解決水聲通信領域的某個具體問題,例如在中國知網中,有利用支持向量機進行水聲信道均衡、水下目標識別等文獻,但尚未體現人工智能的巨大潛力;近年來,尤其是2017-2018年以來,以強化學習、深度學習、深度神經網絡為主要特征的新一代人工智能技術,開始被大量探索和應用于水聲調制信號分類、水聲接收機處理、水聲自適應調制、水聲通信網絡協議、水聲網絡服務質量等方面,顯示出出色的性能增益;同時,業界已開始超前部署海洋物聯網框架下水聲通信網絡與人工智能相結合的策略方案。
目前,水聲通信中應用新一代人工智能技術的研究正在興起,相關文獻尚不算多。
三、水聲通信物理層的人工智能技術
⒈水聲目標識別
Roberts等根據采集到的9種36條不同魚類、每條魚200~300個的回聲數據,利用級聯兩層支持向量機設計了特征融合、決策融合和協作融合的算法,無需對視圖幾何形狀進行假設,即可實現不同魚類的多視圖寬帶聲學分類。研究結果表明,相對于單一視圖的聲學分類方法,該方法錯誤率下降了50%以上。
McQuay等利用深度卷積神經網絡,采用支持向量機對深度學習特征集進行處理,實現了對鯨魚發聲信號的自動識別。對一年時間內在加拿大海洋觀測網搜集到的5573個鯨魚發聲事件、累計28685min的數據進行實驗測試,結果表明,采用深度特征學習方法的平均識別準確率達到98.69%(兩類)和94.48%(多類)。
楊士莪等采用支持向量機對水面艦船輻射噪聲目標信號識別進行了研究,提出差分進化粒子群混合算法,通過對懲罰因子和核函數寬度參數的優化選取,達到優化系統支持向量機模型的目的。海試數據表明,在訓練樣本占實驗數據總數分別為87.5%、75.0%、66.7%和50.0%的情況下,分類精度依次為100%、88.33%、86.25%和72.5%,與網格搜索方法比,整體有了顯著提高。
Chen等提出基于深度信念網絡模型和堆疊降噪自編碼器模型以識別不同水下目標的輻射噪聲;楊宏暉等提出基于加權樣本與特征選擇的機器學習自適應增強(AdaBoost)與支持向量機集成相結合的算法,2組水聲目標數據測試表明,在樣本數量分別減少到45%和50%、特征數量分別減少到33%和51%的情況下,該算法仍可獲得更高的分類準確率。
此外,胡長青、方世良和童峰等分別采用支持向量機對水下聲吶目標識別、艦船噪聲識別和水聲調制信號識別進行了研究;蔣佳佳等基于連續小波變換和人工神經網絡對抹香鯨和長鰭領航鯨分類進行了研究;Ding等采用深度神經網絡對水聲通信信號調制分類進行了研究。
⒉水聲目標定位
Fischell等利用模擬的雙基地散射場數據來訓練支持向量機回歸模型,然后應用于馬薩諸塞州灣實驗收集的7~9kHz線性調頻啁啾水聲數據,進行水下目標方位角估計,估計差異與相對源定位方法實驗觀察的結果一致,效果良好;Pinheiro等則基于支持向量機與自相關核回歸方法,與AUV導航系統耦合,降低了定位算法對反射聲波或水聲信道起伏特性的敏感性,改善了定位精度。
Houégnigan等利用深度神經網絡設計距離估計算法,實現了對單一傳感器小型陣列或小孔徑拖曳陣列的水下定位。海試結果表明,在典型值為300m左右但最遠可達8km的范圍內,對采集的869個樣本,采用預訓練的淺層神經網絡和深度神經網絡2種方法,平均誤差分別為4.3%和3.5%。
程恩等在傳統錨節點選擇算法基礎上,考慮水聲通信開銷、節點剩余能量、聲線傳播彎曲特性等影響,引入粒子群算法建立錨節點優化機制,通過迭代計算得出最優傳感器節點組合以提高定位精度。仿真結果表明,該算法計算量小、收斂速度快、定位精度高,可有效提高節點能量利用、平衡定位性能和能量利用效率。潘翔等還采用支持向量機技術對水下目標定位進行了研究。
⒊水聲信道估計與均衡
Mahmutoglu等提出了一種基于粒子群算法的水聲通信自適應決策反饋均衡器,不依賴于信道特性,收斂速度快,兼顧高通信性能和低計算復雜度;李春國等則提出一種改進的粒子群優化算法,可同時估計每條水聲傳播路徑的多普勒尺度、時延和幅值等參數,在估計精度和計算復雜度兩方面均優于匹配追蹤方法和分數傅里葉變換方法。
付曉梅、王學田等針對水聲OFDM通信系統的信道估計,提出2種基于深度神經網絡的信道估計器,利用接收到的導頻符號和正確的信道脈沖響應對深度神經網絡模型進行訓練,然后估計出信道脈沖響應。實驗結果表明,該方法在誤碼率和歸一化均方誤差方面均優于最小二乘法和反向傳播神經網絡法。
李振興、趙俊渭等研究了基于支持向量機的水聲信道盲均衡算法,非常適合于水聲觸發通信和快衰落水聲信道,但該算法通過二次規劃迭代完成收斂,計算量很大;童峰等則提出先利用支持向量機進行盲均衡器權系數初始化,再切換至運算量較小的常數模算法,湖試結果表明,時變水聲信道條件下,性能優于經典支持向量機盲均衡算法。
此外,郭業才、王衛等還針對水聲信道研究了基于平衡正交多小波變換的模糊神經網絡盲均衡算法、改進遺傳優化的正交小波盲均衡算法。
⒋水聲自適應調制通信技術
Wang等針對長期運行的定期點對點水聲通信系統,提出將水聲自適應傳輸問題建模為部分可觀測的馬爾可夫決策過程,并基于強化學習框架開發了在線算法,以遞歸方式估計水聲信道模型參數,跟蹤水聲信道動態,實現使系統長期成本最小化的最佳發射參數設置。湖試結果表明,相對于理想非因果信道狀態信息的基準方法,所提方法可實現良好的性能。
Song等提出了一種基于強化學習Dyna-Q算法的水聲自適應調制通信策略,采用有效信噪比作為水聲信道狀態參數,根據數據通信的真實情況與仿真經驗,預測信道狀態和通信吞吐量,然后利用該結果結合接收端返回的信道狀態選擇調制參數,使通信吞吐量最大化。仿真結果表明,與直接反饋有效信噪比方案比,Dyna-Q算法可取得更高的通信吞吐量。
蘇為等基于信息服務質量要求、先前的傳輸質量和能量消耗等網絡感知狀態信息,提出了一種基于強化學習的水聲通信自適應調制編碼方案,實現動態選擇水聲通信系統調制和編碼策略。水池和海試數據表明,與基準方案比,提高了吞吐量,并以更少的能耗降低了誤碼率。
此外,Alamgir等則在自適應調制編碼基礎上,使用支持向量機、K最近鄰算法、偽線性判別法和增強回歸樹法進行調制編碼分類研究,進一步提升了水聲自適應調制編碼效果。
⒌水聲通信質量預測
Kalaiarasu等提出采用基于邏輯回歸機器學習模型研究水聲通信性能的時空變化,研究風速、潮汐、流速等環境因素以及水聲通信設備參數因素,對量化的水聲通信數據包傳輸成功率的性能影響。仿真結果表明,在給定環境條件參數和水聲設備參數條件下,所提模型可預測水聲通信性能的時空變化。
該方面研究,目前尚較少見相關文獻報道,但這種以海洋環境要素數據驅動的機器學習模型研究,對發展水聲大數據、利用深度學習進行水聲通信質量預測,選擇最優參數配置具有重要意義。
總體而言,在水聲通信物理層方面,水聲目標識別、水聲目標定位和水聲信道估計與均衡等研究,兼用了傳統智能算法和深度學習等新型人工智能算法;而水聲自適應調制技術和水聲通信質量預測等研究,則是隨深度學習等新型人工智能技術的發展而成為可能的新探索方向,是水聲領域發揮人工智能技術的潛力所在。如張友文等還研究了基于深度學習的時變水聲信道單載波通信接收機處理技術。結合水聲信道特性進行研究,是人工智能技術在水聲通信物理層應用獲得突破的關鍵所在。
四、水聲通信網絡層的人工智能技術
下面以水聲通信組網為應用場景,介紹人工智能技術在水聲通信網絡層方面的研究成果。
⒈水聲網絡路由協議
Xu等提出了一種基于多種群螢火蟲算法的水聲通信網絡路由方案,設計了3種螢火蟲協調規則,在建立、選擇和優化路由時結合了各水下傳感器節點的數據相關性和采樣率。仿真結果表明,與基于向量轉發、分布式水下聚類方案比,該方案在數據包交付比率、能量消耗和網絡吞吐量等方面均可取得較好的性能。
陳友淦等提出在水聲通信網絡中,分別將蟻群算法、人工魚群算法融入水聲協作通信技術進行水聲路由節點選擇。仿真結果表明,所提算法可利用蟻群算法、人工魚群算法尋找全局最優的能力,得到一種使系統總能耗最低的路由線路,同時獲得協作增益和集群智能算法增益,進一步延長了水聲通信網絡的生命周期。
Li等通過結合人工魚群算法中的擁擠因子和蟻群算法中的偽隨機路由選擇策略,提出了一種人工魚群與蟻群混合的算法。仿真結果表明,該混合算法同時吸收了2種算法的優勢,避免了路由算法陷入局部優化和停滯,同時加快了路由收斂速度,尤其適用于大規模水聲通信網絡的應用場景。
Fei、Plate等將強化學習中的Q-learning算法引入到水聲通信網絡路由選擇中,節點通過存儲其直接鄰居節點的路由信息(Q值)來計算路由決策。仿真結果表明,由于Q值估計考慮了水聲節點的能量消耗以及相鄰節點之間的剩余能量分布,可優化網絡總能量消耗,網絡壽命比基于向量轉發的方法平均壽命延長20%,若考慮結合水下節點運動的優化選擇,則可進一步提升性能。
此外,Mitchell等提出將Q-learning算法與ALOHA協議相結合的介質訪問控制方法,以有效使用水聲信道;Javaid等提出基于Q-learning的高效平衡型數據搜集路由協議,以解決水聲通信網絡路由轉發的能量洞問題;魏曉輝等則提出一種基于遞歸神經網絡的水聲監測網絡框架,放棄自動重傳機制,以減少長端到端延遲和能量消耗。
⒉水聲網絡拓撲分簇
Makhoul等提出了一種基于單向方差分析模型增強型K-means算法的2層數據融合聚類方法,以處理水聲通信網絡節點之間的空間相似性問題,協調節點間的數據傳輸,以減少網絡內部通信、降低能量消耗,獲得聚類效益。利用布放于印度洋5000×5000m2范圍內的240個傳感器節點所搜集的數據進行仿真分析,結果表明,與前綴頻率濾波法比,所提算法可降低70%的能量消耗。
LI、ZHANG等提出了一種基于粒子群優化的低復雜度、可并行處理實現全局最優的聚類算法,該算法的粒子適應度函數設計考慮了水聲通信網絡的簇頭能量、簇頭負荷和簇范圍3個優化目標。仿真結果表明,該算法可有效改善水聲通信網絡負載均衡;相比于LEACH算法在運行60輪后網絡即停止工作,所提算法可讓網絡工作持續運行144輪時間,有效延長了網絡生存期。
⒊水聲節點功率分配
Dobre等針對全雙工水聲中繼能量捕獲網絡,考慮中繼節點從海洋環境中捕獲的能量、節點剩余電量、信道狀態信息和干擾水平等過去信息和當前信息,提出采用強化學習優化策略得到每個時間段的最優發射功率,以實現端到端長期總效率最大化的目標。仿真結果表明,在捕獲能量不足的情況下,所提功率分配策略比在線貪婪功率分配策略具有更高的累加率。
馮義志等針對水聲多載波碼分多址通信網絡,提出了一種基于改進粒子群算法的多目標功率控制方案,通過設計一個由接收機功耗和信噪比組成的適應度函數,解決了不同節點到基站距離不相同造成的遠近效應問題,同時有效降低了節點功耗,改進了系統誤碼率性能。
金志剛等針對正交頻分多址多跳水聲通信網絡,提出使用粒子群算法對其子信道進行功率分配。仿真結果表明,與基于握手的介質訪問控制協議相比,所提方案降低了節點間數據沖突導致的數據包丟失概率;在低功耗情況下,有效提高了網絡吞吐量,降低了網絡平均端到端時延。
⒋AUV輔助的水聲數據搜集路徑規劃
姜春曉等針對海洋物聯框架下水聲通信網絡利用AUV進行數據搜集的問題,提出采用基于蟻群算法和遺傳算法2種近似最優啟發式算法,以降低AUV路徑規劃的計算復雜度;吳杰宏等則提出一種距離演化非線性粒子群優化算法,可避開渦流方向障礙物,能耗比線性粒子群優化算法降低了1.049×107J。
韓光潔等針對水聲通信網絡中利用AUV進行數據搜集的問題,提出了一種基于強化學習的區域劃分事件動態競爭數據搜集算法,以解決多任務分配和負載均衡問題。仿真結果表明,該算法在降低端到端傳輸時延的同時,可顯著降低傳輸能耗,保證負載均衡。
⒌水聲網絡安全
肖亮等在文獻中,提出了一種基于強化學習的物理層認證來檢測水聲通信網絡中的欺騙攻擊,與基準物理層認證比,提高了欺騙檢測準確性與網絡效用;在有關文獻中提出了一種基于強化學習Q-learning水聲通信網絡抗干擾方法,在未知干擾器信道增益情況下,各水聲傳感器節點自行選擇發射功率,以實現對動態環境的有效抗干擾;在有關文獻中,則進一步提出一種基于深度Q網絡的抗干擾攻擊水聲數據傳輸框架,應用強化學習控制最優傳輸功率,并用水聲節點移動性控制解決水聲網絡中存在的干擾攻擊,水池實驗表明,該方法可進一步降低誤碼率,對抗反應性干擾。同時,韓光潔等也開展了利用支持向量機建立水聲通信網絡節點傳輸信任模型等水聲網絡安全方面的研究。
總體而言,在水聲通信網絡層方面,無論是水聲網絡路由協議還是組網分簇、節點功率分配,或是AUV輔助的路徑規劃、網絡安全等研究,傳統智能算法或深度學習等新興人工智能技術,均是作為優化算法,從水聲組網的不同應用問題而展開研究。比如,Sundarasekar等還開展了基于深度學習和離散時間隨機控制過程的水聲通信網絡自適應能量感知節能與服務質量研究。緊緊圍繞水聲組網的特殊技術難題進行研究,是人工智能技術在水聲通信網絡層發揮潛力的關鍵所在。
五、結論
近二十年來,人工智能技術在水聲通信與水聲通信組網中的研究,從利用支持向量機進行水聲目標識別定位、水聲信道估計與盲均衡,到利用集群智能算法進行水聲通信網絡路由優化,再到利用深度學習、深度神經網絡進行水聲接收機處理、節點功率分配和水聲網絡安全設計,融合程度越來越深,相關研究方興未艾。
未來,人工智能與水聲通信進行下一步交叉研究的方向,主要包括:⑴針對于海洋環境大動態變化的復雜水聲信道響應問題,研究融合人工智能算法在水聲通信中的應用;⑵針對水聲通信樣機與海洋環境的普適性難題,研究海洋環境要素數據驅動的深度學習自適應技術;⑶針對海試成本高、海試數據標準不統一問題,研究小樣本學習或樣本數據量的增廣設計;⑷針對水聲節點功耗受限問題,研究兼具學習效果好、低復雜度的深度學習技術。
審核編輯:湯梓紅
-
gpu
+關注
關注
28文章
4774瀏覽量
129352 -
人工智能
+關注
關注
1796文章
47666瀏覽量
240281 -
機器學習
+關注
關注
66文章
8438瀏覽量
133082 -
水聲通信
+關注
關注
0文章
18瀏覽量
10748 -
深度學習
+關注
關注
73文章
5513瀏覽量
121546
原文標題:陳友淦、許肖梅:人工智能技術在水聲通信中的研究進展
文章出處:【微信號:AI智勝未來,微信公眾號:AI智勝未來】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
人工智能是什么?
百度人工智能大神離職,人工智能的出路在哪?
【免費名額30個】手把手教你快速學習和應用人工智能技術
人工智能技術及算法設計指南
2019年人工智能技術峰會落幕,大咖演講PPT火熱出爐!
路徑規劃用到的人工智能技術
目前人工智能教育研究最深入最經典的白皮書:德勤《全球人工智能發展白皮書2019》精選資料分享
【開源硬件系列04期】AI人工智能技術帶給EDA的機遇和挑戰(文中含回放+課件)
《移動終端人工智能技術與應用開發》人工智能的發展與AI技術的進步
《移動終端人工智能技術與應用開發》+快速入門AI的捷徑+書中案例實操
《移動終端人工智能技術與應用開發》+理論學習
人工智能技術在軍事情報領域的應用背景






 工商網監
工商網監
評論