 鏡頭自動光圈馬達驅動MS41908參數與替代
鏡頭自動光圈馬達驅動MS41908參數與替代
描述
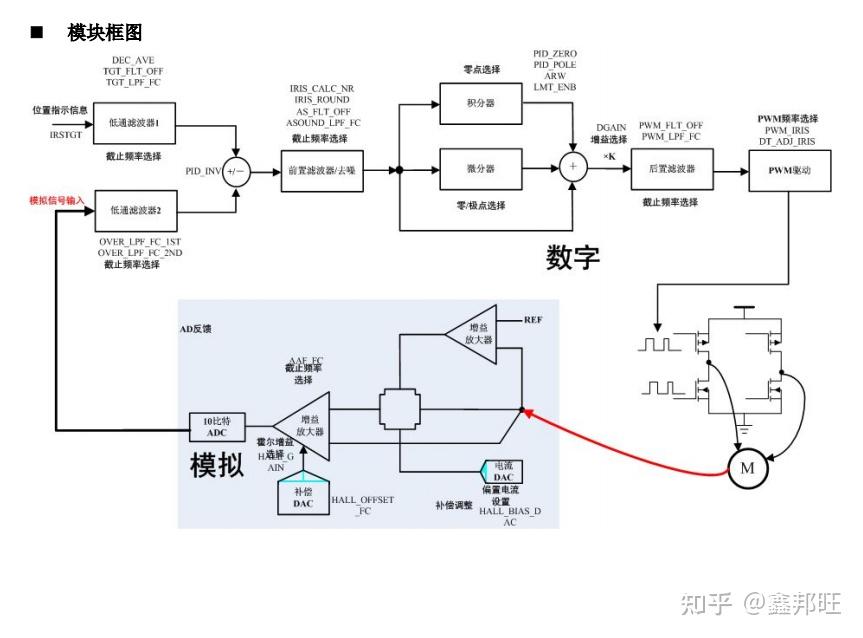
MS41908運用于攝像機鏡頭的聚焦,變倍,自動調節光圈的馬達驅動芯片,256細分步進驅動,芯片內置光圈控制功能;通過電壓驅動方式以及扭矩紋波修正技術,實現了超低噪聲微步驅動。
光圈控制
特性
1) PWM 波驅動→低功耗
2) 通過寄存器可以設置每個濾波器→低噪聲
3) 增益放大器周圍內置無源部件→對外置部分減幅
4) 內置 8 比特 DAC 用來調整霍爾補償
5) 內置電流 DAC 用來調整霍爾偏置電流
主要特點
電壓驅動方式,256 微步驅動電路(兩通道)
內置光圈控制電路
四線串行總線通信控制馬達
內置用于 LED 驅動的 Open-drain 雙系統
替代
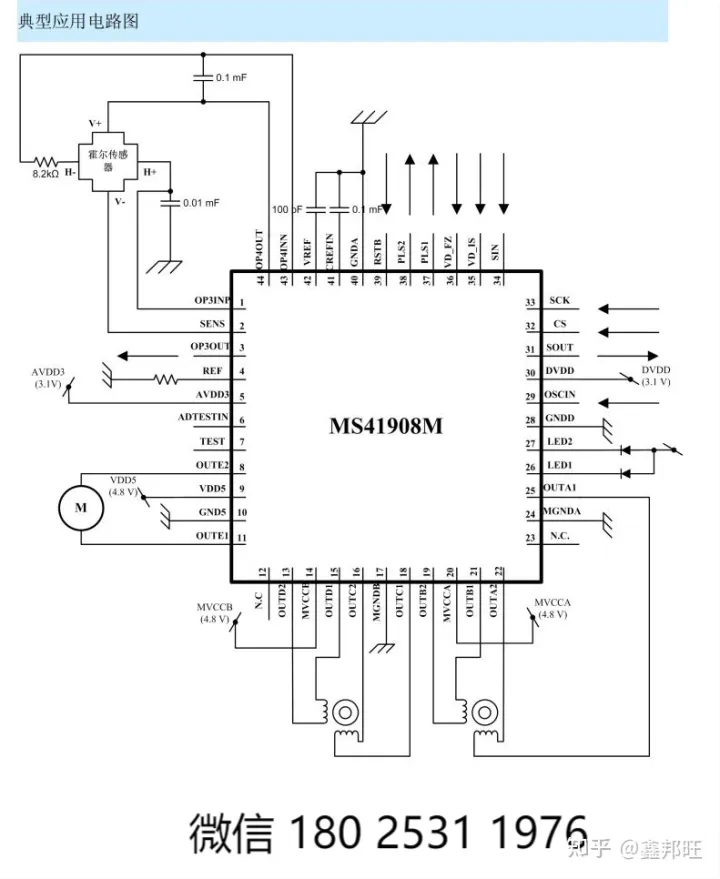
MS41908 PIN= PIN AN41908
應用圖
相關設置的建立時刻
建立時刻和相關時間如下所示
地址 27h 到 2Ah 的設置同 22h 到 25h 的設置相同,所以 27h 到 2Ah 的描述就省略了。如果相關寄存器被刷新,則每一個 VD 周期來到時會實現一次設置的加載刷新。當同樣的設置被執行時超過 2 個 VD 脈沖時,沒有必要在每個 VD 脈沖都寫入寄存器數據。
DT1[7:0](起始點延時,地址 20h)
更新數據時間設置。在系統硬件復位后(39 引腳 RSTB:低→高),開始激勵和驅動電機前
(DT1 結束)這段時間內,必須設置此項由于這個設置在每次 VD 脈沖來到時更新,沒有必要一定在起始點延遲時內寫入。
PWMMODE[4:0],PWMRES[1:0](微步進輸出 PWM 波頻率,地址 20h)
設置微步進輸出 PWM 波頻率。需要在開始激勵和驅動電機前設置執行(DT1 結束)
DT2A[7:0](起始點激勵延時,地址 22h)
更新數據時間設置。復位后(39 引腳 RSTB:低→高),需要在開始激勵和驅動電機前被設
置執行(DT1 結束)
PHMODAB[5:0](相位矯正,地址 22h)
通過矯正線圈 A 和 B 的相位差,驅動器產生的噪聲會減少。合適的相位矯正必須依據于電機
的旋轉方向和速度,此設置需要隨著旋轉方向(CCWCWAB)或者旋轉速度(INTCTABA)的變化而改變。
PPWA[7:0],PPWB[7:0](峰值脈沖寬度,地址 23h)
設置 PWM 最大占空比。設置需要在開始激勵和驅動電機前被設置執行(DT1 結束)
PSUMAB[7:0](步進電機步進數,地址 24h)
1 個 VD 的時間間隔內的電機的轉動次數設置。
每次 VD 脈沖輸入時,電機轉動所設置的次數。因此,設置次數為“0”是可以停止電機的轉動。
......詳細參數請參考規格書
-
鏡頭
+關注
關注
2文章
511瀏覽量
25716 -
光圈
+關注
關注
1文章
45瀏覽量
12303 -
馬達驅動
+關注
關注
2文章
115瀏覽量
20144
發布評論請先 登錄
相關推薦
MS41968——低壓、多通道鏡頭驅動芯片(內置光圈控制)
MS41928M——網絡攝像機·監控攝像機用鏡頭驅動芯片(內置光圈控制)

探索 MS37549 直流無刷馬達驅動方案的奧秘
探索 MS35711T 步進馬達驅動的奧秘
MS3142 馬達驅動:電動積木益智游戲的創新動力
智能云臺背后的技術核心:MS35711T 步進馬達驅動解構
全自動雕刻機:馬達驅動芯片MS3142S的應用案例
MS35774步進馬達驅動方案,為監控領域帶來新突破
柔性振動盤采用音圈馬達的優勢

MS8313 直流無刷馬達驅動:工廠自動化設備的動力引擎
MS35774步進馬達驅動在智能數控機場中的應用
MS3142/MS3142S 馬達驅動 IC 在自動打蛋機研發中的神奇表現

直線型和擺動型音圈馬達機選型相關參數

MS41928M網絡攝像機·監控攝像機用鏡頭驅動芯片(內置光圈控制)





 工商網監
工商網監
評論