 ROS主控與STM32的硬件連接和軟件設置
ROS主控與STM32的硬件連接和軟件設置
硬件連接
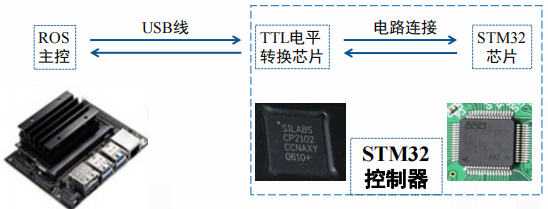
ROS主控通過usb線連接到一個TTL電平轉換芯片,再由這個電平轉換芯片連接STM32芯片
電平轉換芯片可以通過PCB設計在STM32芯片的電路板上,也可以使用一個USB轉TTL的模塊。
為什么兩個控制器之間需要電平轉換芯片?
因為兩個控制器之間通信層次邏輯是不同的,所有需要電平轉換芯片。相當于兩個主控是兩種不同語言的人,電平轉換芯片相當于一個翻譯。
電平轉換芯片可以是:
- cp2102
- ch340
- PL2303
- FT232RL
軟件設置
硬件連接上之后,需要一個軟件設置
需要軟件設置原因:
ROS主控可能接入多個USB設備,或者接入兩個型號一樣的電平轉換芯片。
不同USB設備占用的ROS主控的端口號在每次上電時可能會不一致,這樣需要手動修改代碼中的配置參數,比較麻煩,也無法做到自啟動。
如果存在多個USB設備,但是每種USB設備的電平轉換芯片不一樣,那么我們可以根據芯片名稱來知道端口號,但是如果有兩個芯片一樣的電平轉換芯片,則無法區分,這時候想做自啟動那么必須要進行下面步驟的軟件設置
軟件設置分為兩步:
- 第一步是更改電平轉換芯片的serial,
- 第二步是創建設備別名
更新電平轉換芯片的serial
首先在win環境下安裝更改芯片serial的軟件
CP21xx
Customization Utility.exe
這個軟件在網上下載就可以
打開這個軟件,然后將芯片連接電腦的USB

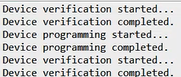
然后將圓圈位置改為0002,然后點擊Program Device。
點完之后要等下,在Status Logging窗口中出現下面信息,才說明修改好了
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
112文章
16446瀏覽量
179456 -
STM32
+關注
關注
2272文章
10924瀏覽量
357579 -
智能車
+關注
關注
21文章
404瀏覽量
77063 -
ROS
+關注
關注
1文章
280瀏覽量
17098
發布評論請先 登錄
相關推薦
【ROS RIKIBOT基礎--使用系列 第一章節】ROS機器人硬件系統 精選資料分享
【ROS RIKIBOT基礎–使用系列】ROS機器人硬件介紹1.RIKIBOT機器人硬件介紹1.1硬件框架
發表于 07-30 06:59
ROS與STM32是如何進行通信的
ROS與STM32通信2020.8.1主要內容制作ROS包,將控制命令傳給STM32,并將接收到的數據作為話題進行發布STM32接收數據并將
發表于 08-11 07:25
stm32cubemx的ST-link v2硬件連接與軟件設置如何去實現呢
怎樣去搭建一種stm32cubemx硬件底層+軟件設置開發環境呢?stm32cubemx的ST-link v2
發表于 02-17 07:15
基于FreeRTOS的micro(微型)ROS
開發者創建機器人應用軟件。它提供了硬件抽象、設備驅動、庫函數、可視化、消息傳遞和軟件包管理等諸多功能。ROS遵守BSD開源許可協議。 ROS

ros智能小車硬件介紹
ROS控制端說明目前ROS小車控制主要由樹莓派3B+/樹莓派4B+作為主控,由于樹莓派管腳資源有限,所以驅動多路電機和編碼器采集速度的任務通常會交給驅動板處理,小車電機驅動目前有STM32
發表于 12-07 14:36
?16次下載

STM32 SPI 軟件NSS和硬件NSS解讀
[導讀]SSM可以控制內部NSS引腳與SSI(一個寄存器,軟件模式)相連,還是與NSS外部引腳(真正的STM32引腳,硬件模式)相連。真正作用的是內部NSS引腳(內部NSS引腳才真正連接
發表于 12-22 19:12
?14次下載
ROS與STM32通信
ROS與STM32通信2020.8.1主要內容制作ROS包,將控制命令傳給STM32,并將接收到的數據作為話題進行發布STM32接收數據并將
發表于 12-24 19:00
?12次下載
ROS小車STM32底層控制代碼
2.6 ROS小車STM32底層控制代碼經過之前幾篇文章,我相信大家一定對下面這些模塊都已經有些了解了。今天,我們將編寫ROS小車STM32單片機底層控制的最后一篇文章。我們將一起按照
發表于 01-14 12:54
?16次下載

ROS主控讀取stm32發送的數據
ROS主控讀取stm32發送的數據 之后便可以通過 Stm32_Serial .read (Receive_Data_Pr,sizeof(Receive_Data_Pr)); read





 工商網監
工商網監
評論