 制作一個Ethersweep步進電機控制器
制作一個Ethersweep步進電機控制器
“開源、易于使用的以太網連接步進電機控制器。由 FreeCAD、KiCAD 和 Arduino 打造。”
概覽
Ethersweep 是一款適用于 NEMA17 步進電機的電機控制器,可通過普通以太網網絡進行控制。這意味著您可以通過普通電腦(筆記本電腦/服務器/raspberrypi)、移動設備、微控制器、PLC 和任何其他能夠發送 UDP 消息的機器來控制運動。您還可以控制任意數量的電機,因為每個電機都能從網絡上的 DHCP 服務器獲得一個 IP 地址。您還可以將末端和 E-Stops 連接到控制器。還可以通過網絡請求獲取編碼器反饋、電壓、運行和按鈕狀態等傳感器數據。
您所需要的只是網絡和 5 至 30 伏的電源。
每臺電機都必須連接以太網(最好使用 DHCP)和 5...30V 的電源。USB 可用于用新固件對控制器進行編程。末端和 E-Stops 可通過 JST3 針連接器連接。要向 Ethersweep 發送指令,只需通過 UDP 向控制器的 IP 和端口發送 JSON 編碼信息即可。
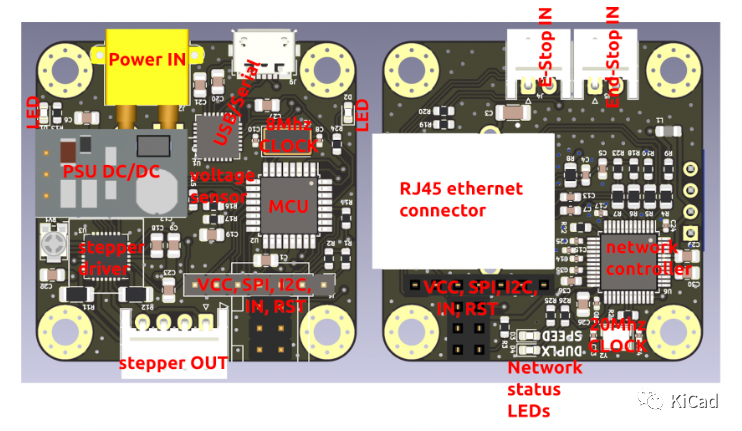
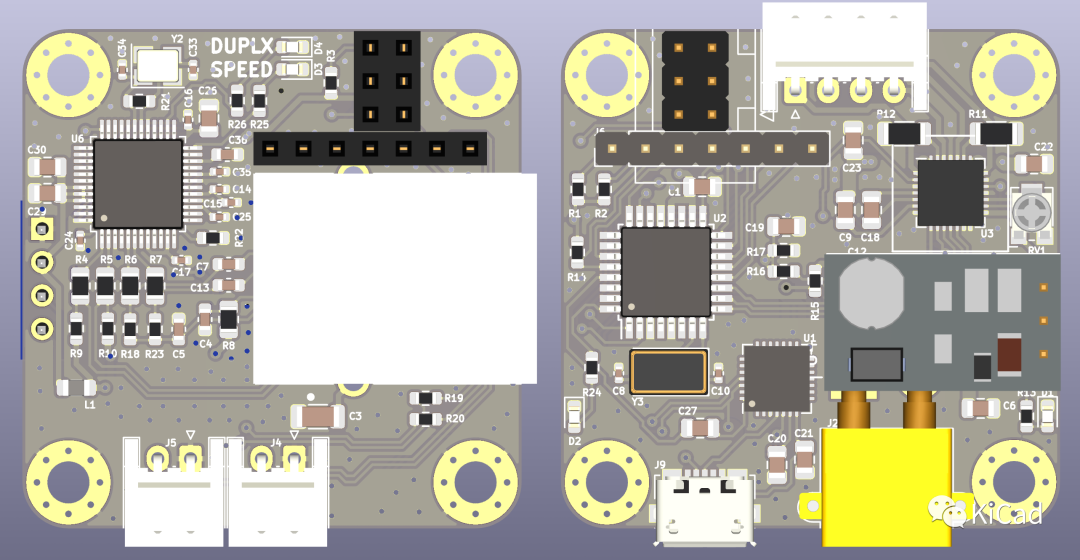
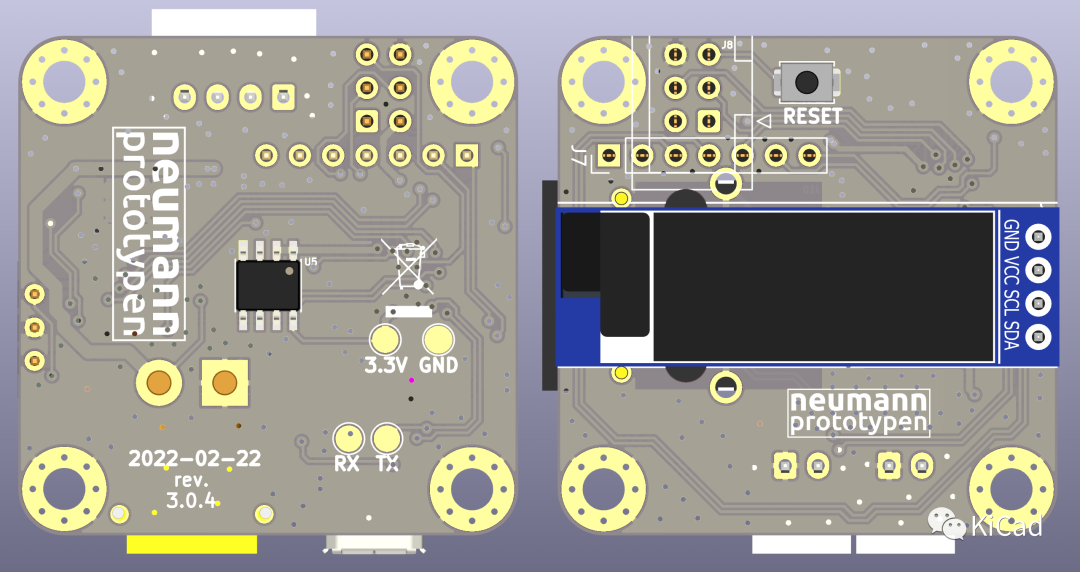
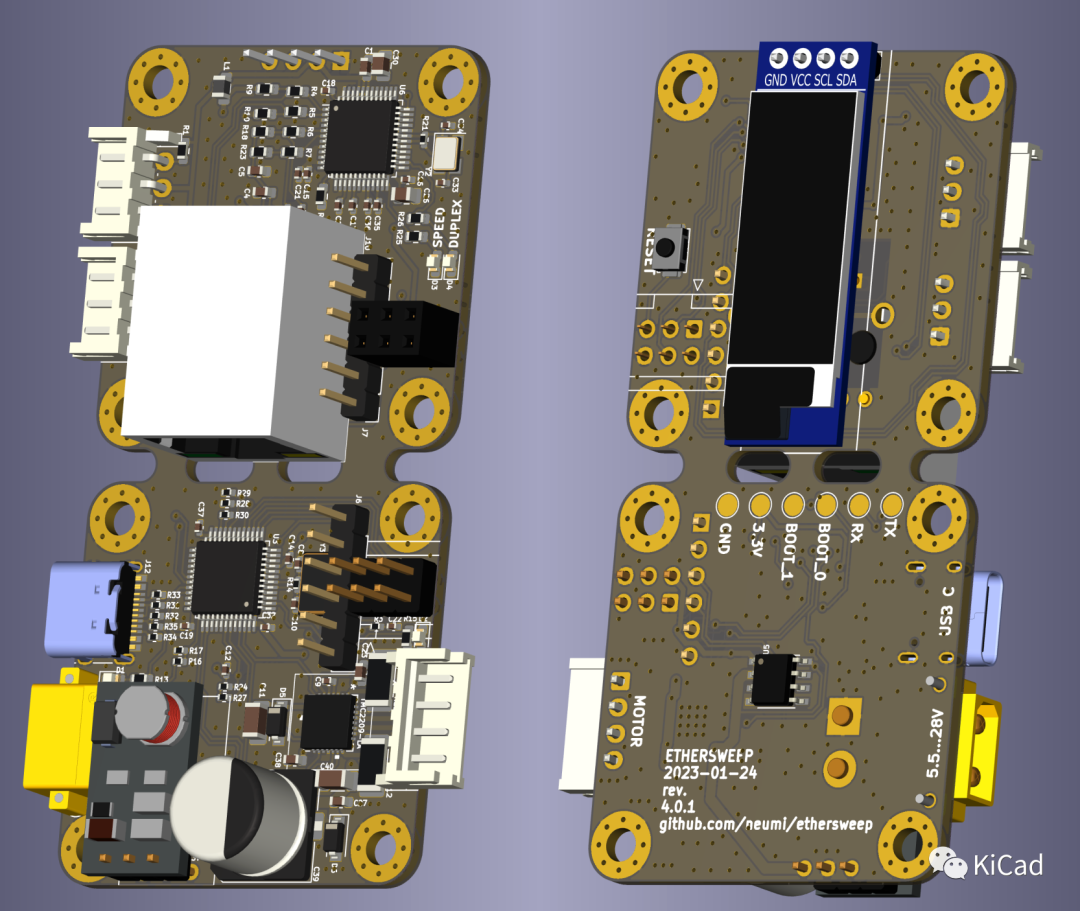
硬件 Spec
W5500 以太網控制器
72MHz 的 STM32f103 微控制器
AS5600 磁性旋轉編碼器
XT30 電源連接器
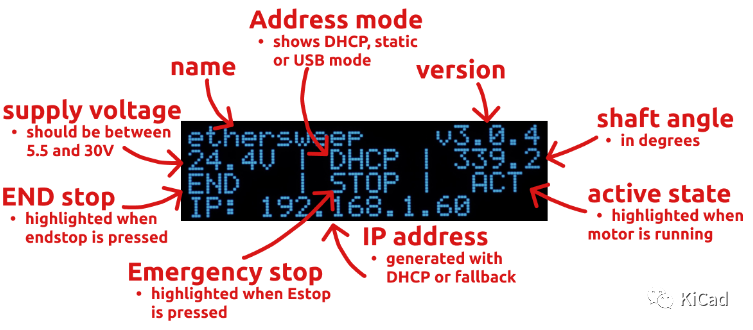
Oled 128x32 顯示器
USB 可編程
E-Stop 和 End-Stop 輸入
復位按鈕
適用于 NEMA17 步進電機
標準 RJ45 網絡連接器
如何開始?
制作一個 Ethersweep 控制器。所有制造/組裝文件均可與 JLCPCB 配合使用,電路板到貨后只需進行一些簡單的 THT 焊接。代碼可從資源庫中獲取。 通過以太網將 Ethersweep 控制器連接到網絡,并連接到 5.5...30V 電源。在 NEMA17 電機軸上粘貼編碼器磁鐵(徑向磁化),并將控制器連接到電機的四個 M3 螺釘上。連接電源和以太網后,控制器將使用 DHCP 搜索 IP 地址。找到 IP 地址后,控制器會在顯示屏上顯示出來,然后就可以使用了。如果沒有找到 IP,則默認為 192.168.1.111。(建議使用 DHCP)
現在可以使用 Python 腳本控制電機了。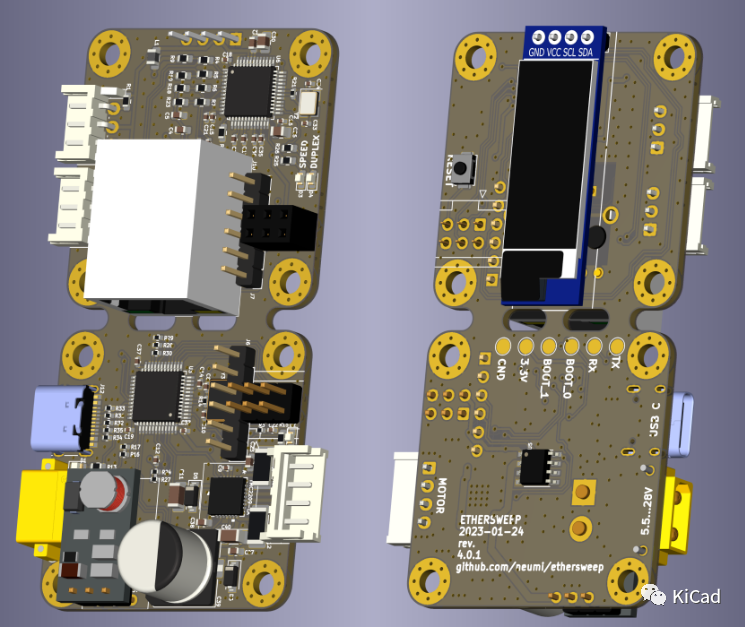
使用 Python 控制步進電機
import socket import json IP_MOTOR = "192.168.1.185" # ethersweep IP (change to motors IP) UDP_PORT = 8888 # ethersweep port def drive_motor(steps, speed, direction, mode, motor_ip): json_data = json.dumps({'steps': steps, 'speed': speed, 'direction': direction, 'mode': mode}) message = json_data.encode() sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM) sock.sendto(message, (motor_ip, UDP_PORT)) drive_motor(100, 9500, 1, 32, IP_MOTOR) # this will spin the motor 100 steps
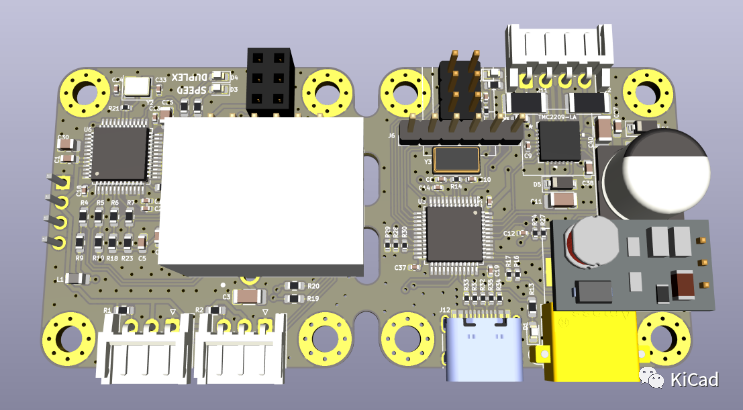
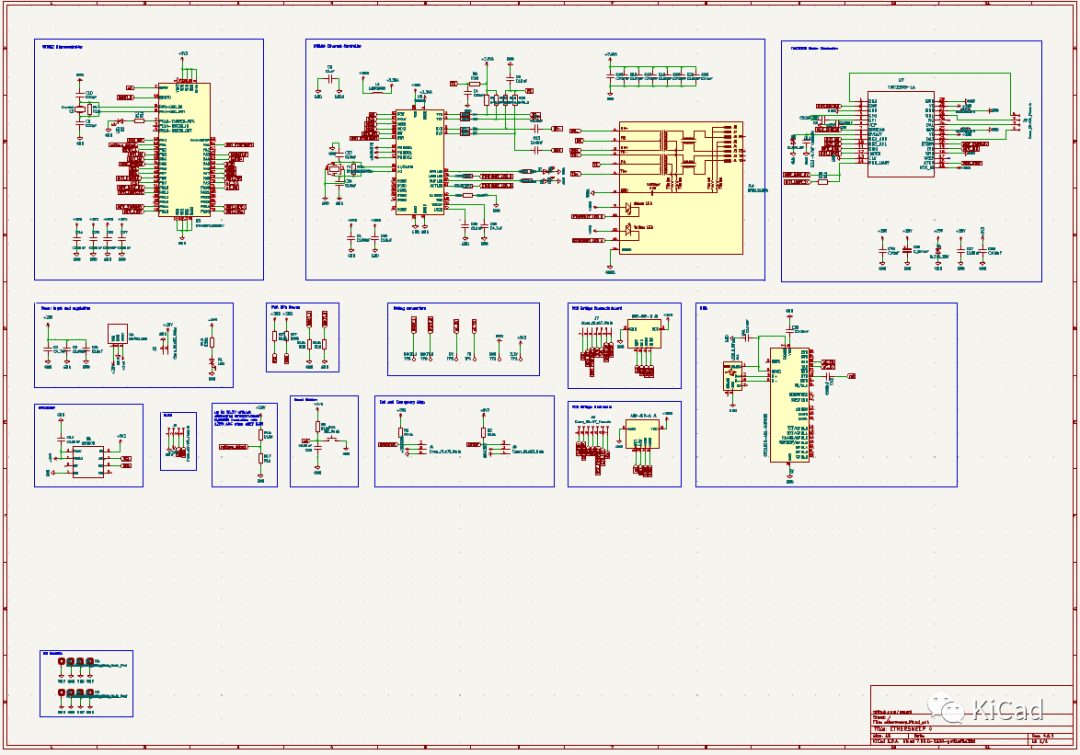
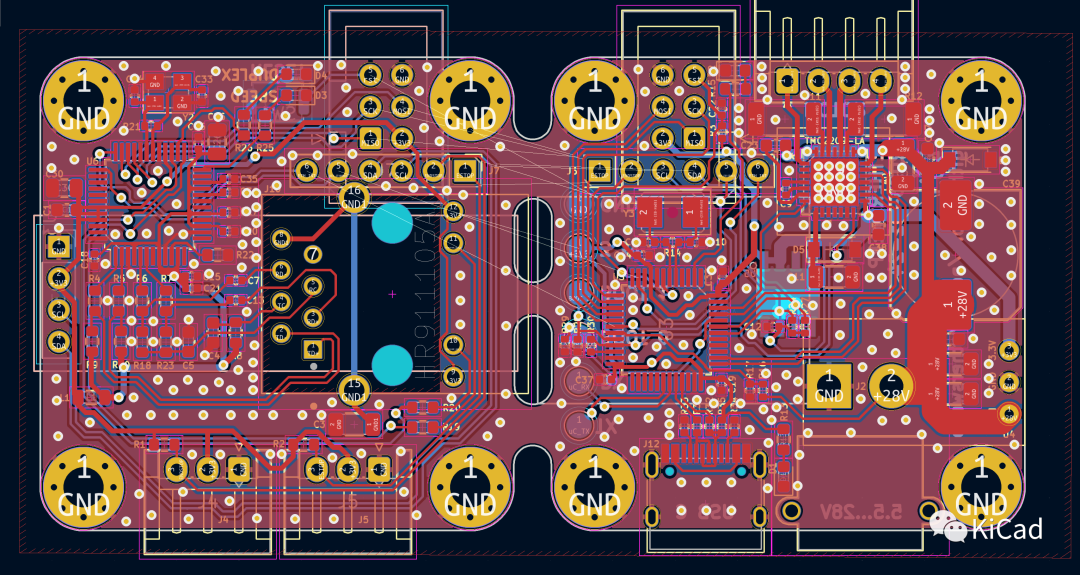
原理圖 & PCB
License
Unknown
倉庫 & 下載
可以在Github中獲取開源倉庫:
https://github.com/Neumi/ethersweep
審核編輯:湯梓紅
-
控制器
+關注
關注
112文章
16448瀏覽量
179463 -
以太網
+關注
關注
40文章
5460瀏覽量
172743 -
步進電機
+關注
關注
151文章
3120瀏覽量
147848 -
電機控制器
+關注
關注
20文章
541瀏覽量
32181 -
python
+關注
關注
56文章
4807瀏覽量
85040
原文標題:Made with KiCad(三十六):Ethersweep 步進電機控制器
文章出處:【微信號:嵌入式加油站,微信公眾號:嵌入式加油站】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦








 工商網監
工商網監
評論