 一文讀懂:為什么碰撞檢測是協作機器人的底層技術
一文讀懂:為什么碰撞檢測是協作機器人的底層技術
協作機器人
傳統工業機器人體積龐大且安全系數低,因為作業半徑內不允許有人。隨著精密制造、柔性制造等動態非結構化生產需求增加,機器人與人、機器人與環境的共存對機器人設計提出了更高的要求,具備這種能力的機器人我們將其稱為協作機器人。
協作機器人具有諸多優點,包括輕量化、環境友好性、智能感知、人機協作和易于編程等。在這些優點背后,有一項功能是非常重要的,那就是碰撞檢測——主要作用是減少碰撞力對機器人本體的影響,避免機器人本體或者外圍設備損壞,更重要的是防止機器人對人類造成損傷。
隨著科學技術的發展,用于實現協作機器人碰撞檢測的方式已經有很多,包括運動學、力學、光學等。當然,這些實現方式的核心都是具備各種檢測功能的元器件。
協作機器人的碰撞檢測
機器人的出現并非意在完全取代人類,很多工作需要人類和機器人相互合作來完成,這便是協作機器人誕生的背景。協作機器人的設計初衷是為了與人類在工作中進行互動和協作,以提升工作效率和安全性。
在一個工作場景下,協作機器人與人類直接合作,因此安全性問題怎么強調都不為過。為了保障人機協作的安全性,業界制定了諸多相關的法規和標準,目的就是為了讓協作機器人從設計之初就考慮到人機協作的安全性問題。
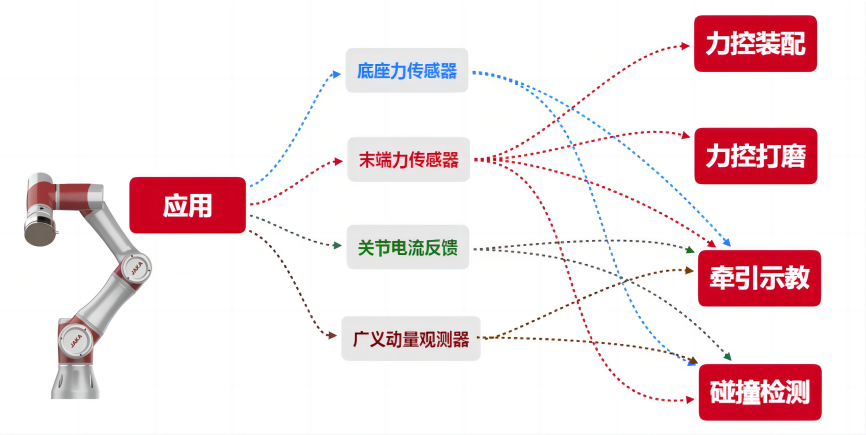
圖1:碰撞檢測位于協作機器人設計邏輯的底層
(圖源:節卡機器人)
同時,協作機器人自身也要確保安全可靠。由于協作機器人的空間自由度非常高,且主要替代人類在復雜、危險環境中的工作,因此在磨削、裝配、鉆孔、搬運等工作中,也需要對可能發生的碰撞進行快速可靠的檢測。
為了讓協作機器人不與人類、環境發生碰撞,設計者們將碰撞檢測大致分為四個環節:
01
預碰撞檢測
在一個工作環境里部署協作機器人時,設計者希望這些機器人能夠像人類一樣熟知環境,規劃自己的移動路徑。為了達到這一點,設計者在協作機器人上安裝具有一定計算能力的處理器和檢測算法,并搭建攝像頭、傳感器和雷達的一種或者幾種作為檢測手段。如上所述,預碰撞檢測是有行業標準可以遵循的,比如ISO/TS15066協作機器人設計標準中,就要求協作機器人在人接近時停止運行,人離開時立即恢復。
02
碰撞檢測
這就是一個非是即否的形態,代表協作機器人是否發生了碰撞。為了不發生誤觸發的問題,設計者會為協作機器人設定一個閾值。這個閾值的設定是非常考究的,既要保證不能頻繁觸發,同時也要極度靈敏以避免碰撞。由于機器人的控制主要靠馬達,因此設計者將這個閾值和馬達自適應算法結合在一起,做到碰撞即停。
03
碰撞隔離
當系統確認碰撞發生之后,需要確認具體的碰撞點或者是碰撞關節。此時實施隔離目的就是讓這個碰撞的部位停下來。傳統機器人的碰撞隔離通過外部護欄來實現,協作機器人由于處于開放空間,因此就需要通過算法和反向加速度來實現。
04
碰撞識別
此時協作機器人已經確認發生了碰撞,相關變量已經超出了閾值。這時候機器人上的處理器需要根據傳感信息判斷碰撞是否為偶發碰撞,如果判定結果為是,那么協作機器人需要自我修正;如果判定為非偶發碰撞,那么此時協作機器人將停機等待人類處理。
可以說碰撞檢測是協作機器人實現自我感知非常重要的主張,為協作機器人的大規模應用和進入更廣泛的場景提供了可能。在不同的碰撞環節,協作機器人對于傳感器的需求是不一樣的。比如在預碰撞檢測環節,系統的主要目的是不讓碰撞發生,因此傳感器的職責就是環境感知。實現的路線有很多,比如基于視覺的環境感知,基于毫米波雷達的環境感知,還有基于激光雷達的環境感知等,那么就需要配合對應的傳感器和算法。
當碰撞發生之后,重要的是協作機器人要第一時間知曉碰撞點和碰撞的程度,以采取進一步的措施防止情況進一步惡化。碰撞檢測傳感器便是在此時發揮作用。常見的碰撞傳感器主要有機械式碰撞傳感器、磁力式碰撞傳感器、壓電式碰撞傳感器、應變式碰撞傳感器、壓阻片式碰撞傳感器和水銀開關式碰撞傳感器等。
我們都知道,協作機器人在工作時,機械臂會被施加來自很多方向的力矩,用以讓機械臂運動起來進行工作。如下圖所示,搭載碰撞傳感器的保護系統在檢測到碰撞發生之后,會施加合力矩、轉矩以及軸向負載的反作用力,協作機器人會立刻停止工作。
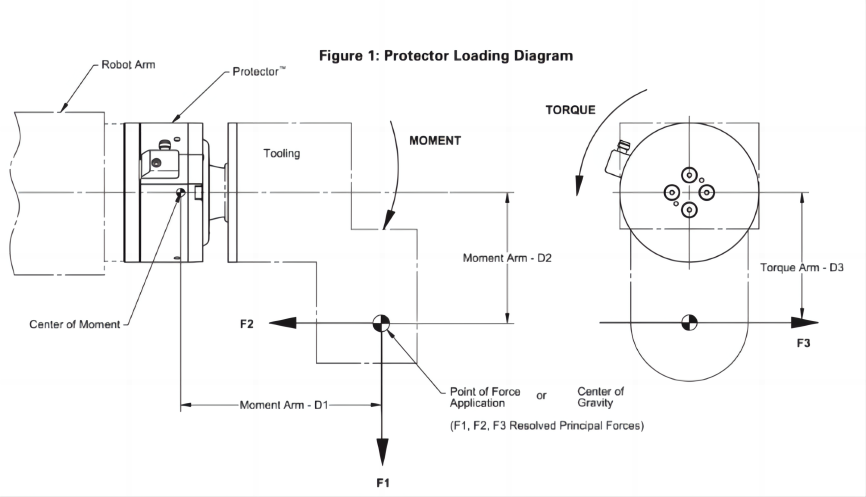
圖2:機械臂保護系統框圖
(圖源:ATI)
如果你已經迫不及待想要實現一款具有高度安全性的協作機器人,下面這兩款貿澤電子在售的傳感器都是很不錯的選擇。
具有高分辨率閾值的
三軸數字加速度計
上文中提到,目前用于協作機器人的碰撞檢測傳感器已經非常多了,在此我們展開說一下三軸數字加速度計。
三軸數字加速度計可以用于測量物體在三個坐標軸上的加速度,當碰撞發生時,以此計算加速度計值之間的差值,當差值累計超過閾值時,則確認系統發生了碰撞。三軸數字加速度計是目前行業里用以確認碰撞發生的簡單方式之一。
下面我們就為大家介紹一款貿澤電子在售的,可用于協作機器人碰撞檢測的三軸數字加速度計,來自制造商ROHM Semiconductor,這款器件在貿澤電子官網上的料號為KX132-1211。
圖3:KX132-1211三軸數字加速度計
(圖源:貿澤電子)
KX134和KX132三軸數字加速度計是兩款硅微機械加速度計,具有用戶可配置的3級高級數據路徑(ADP),其中包含低通濾波器、低通/高通濾波器和RMS計算引擎,還配備了先進的喚醒和睡眠檢測功能。
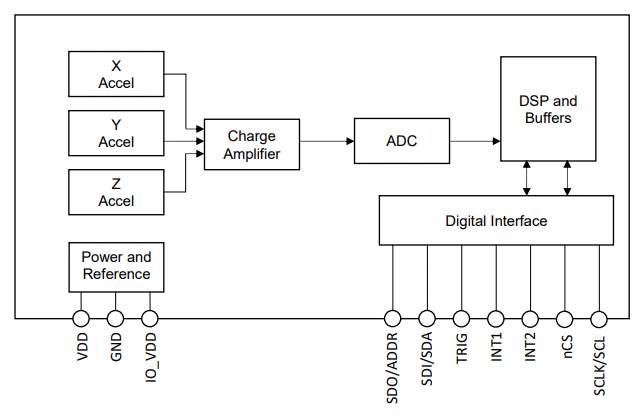
圖4:KX132-1211三軸數字加速度計功能框圖
(圖源:ROHM Semiconductor)
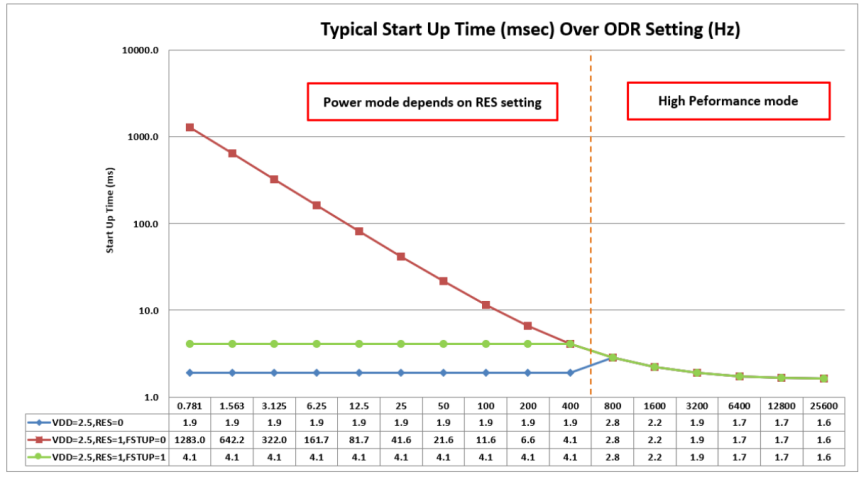
圖5:KX132-1211三軸數字加速度計啟動時間框圖
(圖源:ROHM Semiconductor)
KX134和KX132三軸數字加速度計具有高分辨率閾值和高精度。其中,高分辨率閾值可配置到低至15.6mg,還在整個溫度范圍內降低了噪聲并改善了線性度。
在精度方面,KX134-1211用戶可配置的g值范圍可達±64g,輸出數據傳輸速率可達25600Hz;KX132-1211用戶可配置的g值范圍可達±16g,輸出數據傳輸速率可達25600Hz 。兩款三軸數字加速度計都集成了自由落體、Directional-Tap/Double-Tap和設備定向算法,提高了低功耗模式下基于溫度的ODR精度。
KX134和KX132三軸數字加速度計還具有出色的耐熱性能和耐沖擊能力,并內置穩壓器,可應對嚴苛的工作環境。
靈敏度可選的法蘭安裝式磁簧傳感器
磁力式碰撞傳感器也是一種應用廣泛的碰撞檢測傳感器,它通過磁性材料的磁性特性來檢測磁場的變化,并將其轉換成電信號輸出,實現對物理量的測量。作為磁力式碰撞傳感器的一種,應用于協作機器人上時,磁簧傳感器更多是用于限位和安全訪問。
接下來我們為大家推薦一款超小型法蘭安裝式磁簧傳感器,來自制造商Littelfuse,貿澤電子官網上該器件的料號為59155-1-S-02-A。
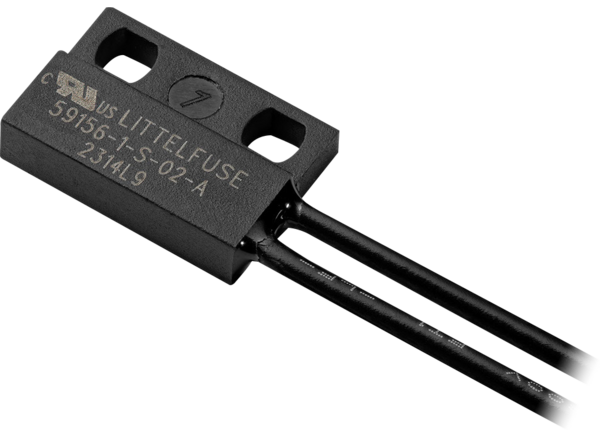
圖6:Littelfuse超小型法蘭安裝式磁簧傳感器
(圖源:貿澤電子)
59155和59156是Littelfuse新推出的超小型法蘭安裝式磁簧傳感器,與目前市場上類似尺寸的產品相比,59155和59156更加小巧,尺寸僅為12.70mm x 9.00mm x 3.00mm,僅占用1.09cm2電路板空間。
尺寸雖小,不過Littelfuse超小型法蘭安裝式磁簧傳感器的性能很出色。59155和59156具有非常高的切換能力,可以在10W的條件下切換120VAC/170VDC。這些法蘭安裝式磁簧傳感器采用非接觸式開關,適合用于潮濕和惡劣環境。他們的法蘭支座的外殼設計支持可定制,具有絕佳的可調節性,使其適合不同行業的各種小間距應用,這當然也包括從事嚴苛復雜工作的協作機器人。
Littelfuse超小型法蘭安裝式磁簧傳感器采用殼體設計,可使用M2螺絲以0.1Nm扭矩進行安裝,也支持黏合式安裝,因此非常易于使用。除了應用于協作機器人的接近/限位傳感、安全和訪問控制,這些法蘭安裝式磁簧傳感器也可用于工廠自動化、加工設備、家電和物聯網等領域。
協作機器人的柔性交互
對于協作機器人,很多人都熟知它是工作制造領域柔性生產的重要組成部分。面向未來,協作機器人在包括碰撞檢測等方面的發展也需要更加柔性。上述我們詳述了協作機器人的碰撞檢測,現階段產業也取得了長足進步。不過,從用戶的角度來看,這明顯還不夠。
在部署時,協作機器人對于環境的了解還是半自適應的,需要人類操作其在工作空間內巡航至少一次才能夠對路線有大致理解。在和人類交互時,目前協作機器人為了避免碰撞,基本采取直接停止工作的方式應對,和我們理想中的人機協作還有差距。為了進一步提升柔性交互的體驗,感知能力、學習能力等方面還需要精進,需要更好的傳感器和算法支持。
未來的協作機器人必將會更加智能、靈活、多功能和人性化,貿澤電子也將持續將先進的器件帶給大家,與行業和從業者共同成長。
相關技術資源
ROHM Semiconductor 三軸數字加速度計,了解詳情>>
Littelfuse 59155和59156法蘭安裝件,了解詳情>>
該發布文章為獨家原創文章,轉載請注明來源。對于未經許可的復制和不符合要求的轉載我們將保留依法追究法律責任的權利。
關于貿澤電子貿澤電子(Mouser Electronics)是一家全球知名的半導體和電子元器件授權代理商,分銷超過1200家品牌制造商的680多萬種產品,為客戶提供一站式采購平臺。我們專注于快速引入新產品和新技術,為設計工程師和采購人員提供潮流選擇。歡迎關注我們!
更多精彩

原文標題:一文讀懂:為什么碰撞檢測是協作機器人的底層技術
文章出處:【微信公眾號:貿澤電子】歡迎添加關注!文章轉載請注明出處。
-
貿澤電子
+關注
關注
16文章
1124瀏覽量
96782
原文標題:一文讀懂:為什么碰撞檢測是協作機器人的底層技術
文章出處:【微信號:貿澤電子,微信公眾號:貿澤電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
自動化新寵打開人機協同的未來,底層芯片如何賦能協作機器人發展?

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
MiR推出MC600移動協作機器人
協作機器人TM25S:高效人機協作改變傳統作業方式

優傲機器人升級高負載協作機器人,助力客戶生產效率飛躍
協作機器人拽拖示教詳解

工業機器人仿真軟件有哪些
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
海默機器人榮獲“中國協作機器人創新產品獎”:創新引領,智造未來






 工商網監
工商網監
評論