 陀螺儀LSM6DSV16X與AI集成(3)----讀取融合算法輸出的四元數
陀螺儀LSM6DSV16X與AI集成(3)----讀取融合算法輸出的四元數
概述
LSM6DSV16X 特性涉及到的是一種低功耗的傳感器融合算法(Sensor Fusion Low Power, SFLP).
低功耗傳感器融合(SFLP)算法:
該算法旨在以節能的方式結合加速度計和陀螺儀的數據。傳感器融合算法通過結合不同傳感器的優勢,提供更準確、可靠的數據。
6軸游戲旋轉向量:
SFLP算法能夠生成游戲旋轉向量。這種向量是一種表示設備在空間中方向的數據,特別適用于游戲和增強現實應用,這些應用中理解設備的方向和運動非常關鍵。
四元數表示法:
旋轉向量以四元數的形式表示。四元數是一種編碼3D旋轉的方法,它避免了歐拉角等其他表示法的一些限制(如萬向節鎖)。一個四元數有四個分量(X, Y, Z 和 W),其中 X, Y, Z 代表向量部分,W 代表標量部分。
FIFO存儲:
四元數的 X, Y, Z 分量存儲在 LSM6DSV16X 的 FIFO(先進先出)緩沖區中。FIFO 緩沖區是一種數據存儲方式,允許臨時存儲傳感器數據。這對于有效管理數據流非常有用,特別是在數據處理可能不如數據收集那么快的系統中。
最近在弄ST和瑞薩RA的課程,需要樣片的可以加群申請:615061293 。
圖片包含了關于 LSM6DSV16X 傳感器的低功耗傳感器融合(Sensor Fusion Low Power, SFLP)功能的說明。這里是對圖片內容的解釋:
SFLP 功能:
- SFLP 單元用于生成基于加速度計和陀螺儀數據處理的以下數據:
- 游戲旋轉向量:以四元數形式表示設備的姿態。
- 重力向量:提供一個三維向量,表示重力方向。
- 陀螺儀偏差:提供一個三維向量,表示陀螺儀的偏差。
激活與重置: - 通過在 EMB_FUNC_EN_A(04h)嵌入式功能寄存器中設置 SFLP_GAME_EN 位為 1 來激活 SFLP 單元。
- 通過在 EMB_FUNC_INIT_A(66h)嵌入式功能寄存器中設置 SFLP_GAME_INIT 位為 1 來重置 SFLP 單元。
性能參數表:
表格展示了 SFLP 功能在不同情況下的性能,包括靜態精度、低動態精度和高動態精度,以及校準時間和方向穩定時間。這些參數反映了傳感器在不同運動狀態下的精確度和響應速度。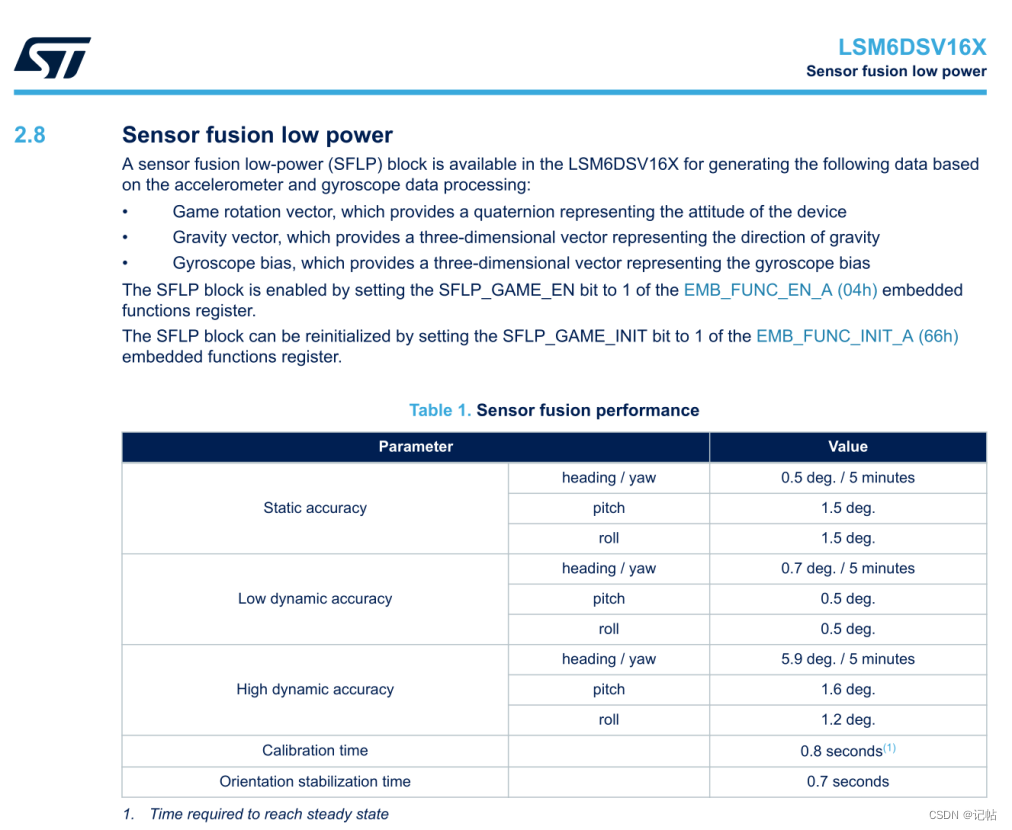
視頻教學
https://www.bilibili.com/video/BV1Jw41187c5/
樣品申請
https://www.wjx.top/vm/OhcKxJk.aspx#
完整代碼下載
https://download.csdn.net/download/qq_24312945/88613104
使用demo板
最近在弄ST和瑞薩RA的課程,需要樣片的可以加群申請:615061293 。
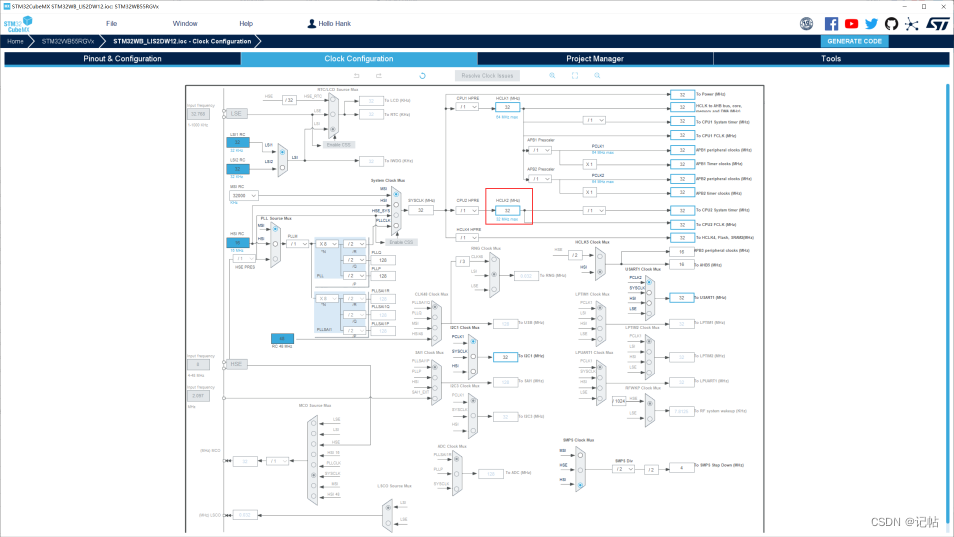
生成STM32CUBEMX
用STM32CUBEMX生成例程,這里使用MCU為STM32WB55RG。
配置時鐘樹,配置時鐘為32M。
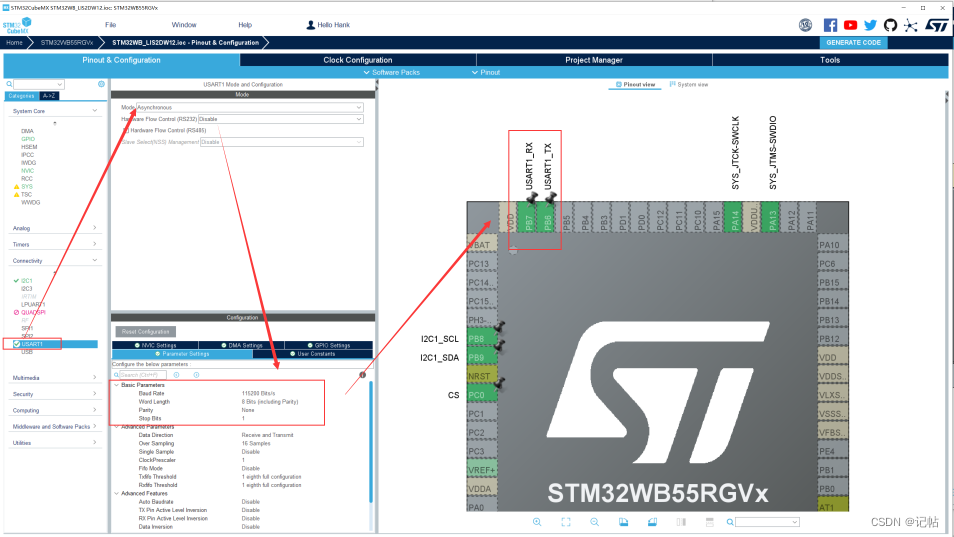
串口配置
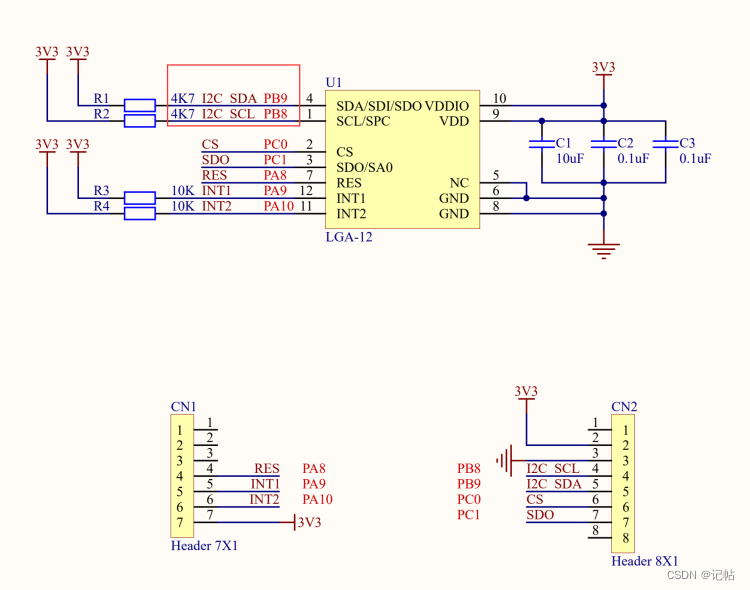
查看原理圖,PB6和PB7設置為開發板的串口。
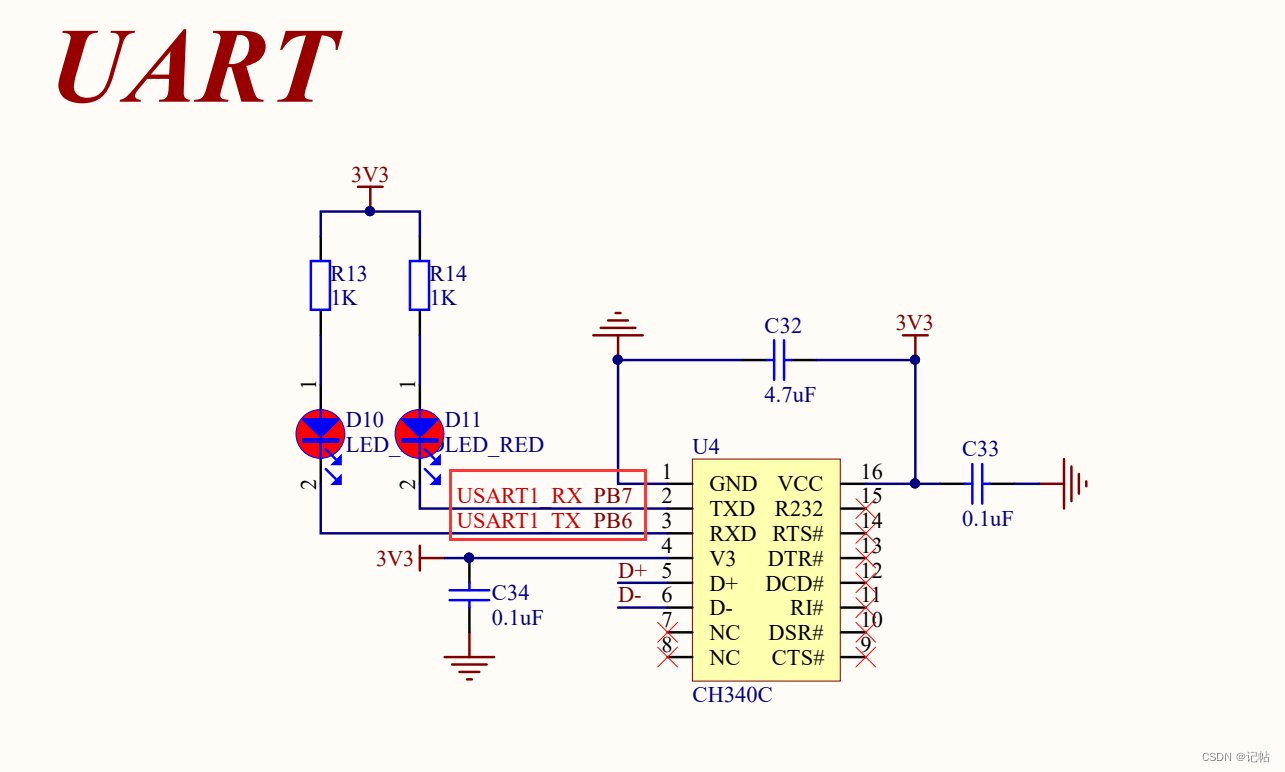
配置串口。
IIC配置
配置IIC為快速模式,速度為400k。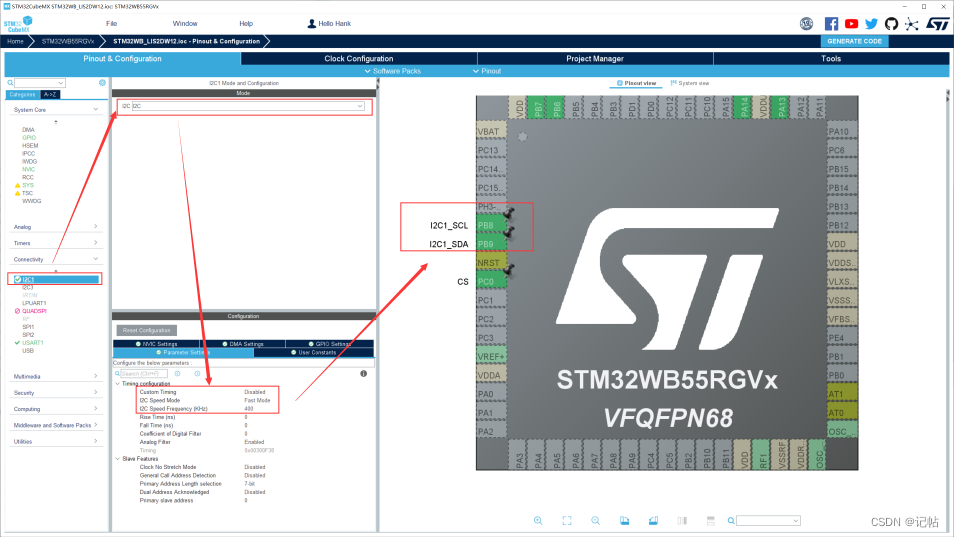
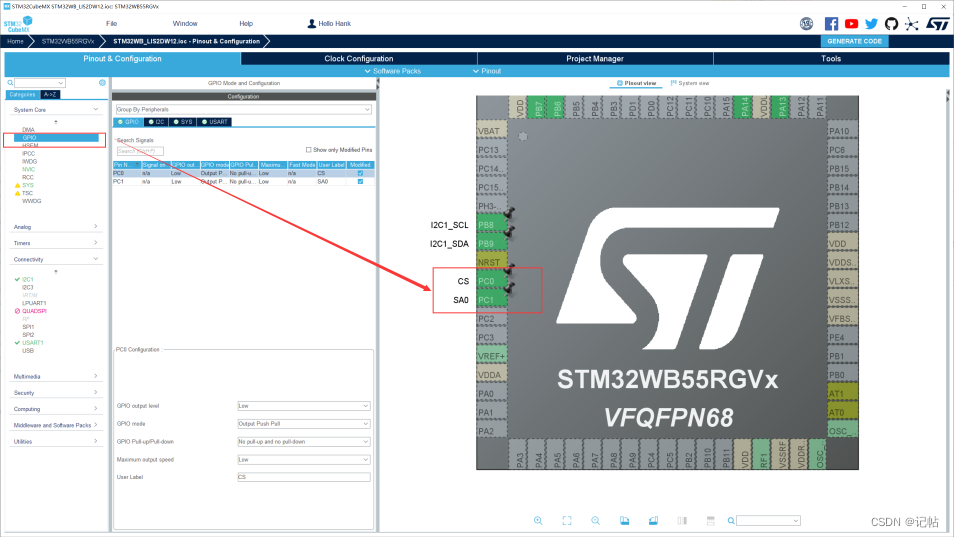
CS和SA0設置
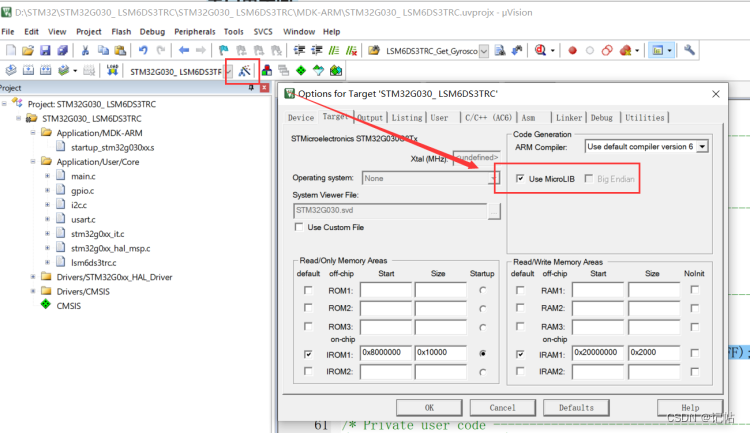
串口重定向
打開魔術棒,勾選MicroLIB
在main.c中,添加頭文件,若不添加會出現 identifier "FILE" is undefined報錯。
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
函數聲明和串口重定向:
/* USER CODE BEGIN PFP */
int fputc(int ch, FILE *f){
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END PFP */
參考程序
初始化SFLP步驟
啟用 LSM6DSV16X 傳感器中的旋轉向量低功耗傳感器融合(Rotation Vector SFLP)功能的步驟。旋轉向量是一個四元數,它提供了一個精確的設備姿態估計。這通常用于游戲控制、增強現實和虛擬現實等應用。下面是函數各部分的作用:
- 函數定義:LSM6DSV16XSensor_Enable_Rotation_Vector 旨在啟用旋轉向量功能,并返回操作的結果。如果成功,返回 0;如果出現錯誤,則返回錯誤代碼。
- 設置滿量程:函數首先設置加速度計和陀螺儀的滿量程,這是傳感器能夠測量的最大范圍。這里分別設置為 4g 和 2000 度每秒(dps)。
- 獲取 FIFO SFLP 設置:然后,它讀取當前的 FIFO SFLP(傳感器融合低功耗)配置。
- 啟用旋轉向量 SFLP 特性:通過將 fifo_sflp.game_rotation 設為 1 來啟用游戲旋轉向量功能。
- 設置 FIFO 模式:將 FIFO 設置為流模式(也稱為連續模式),在此模式下,數據持續地流入 FIFO,如果 FIFO 滿了,新數據會覆蓋舊數據。
- 設置數據輸出率:為加速度計和陀螺儀以及 SFLP 設置數據輸出率(ODR),在這里都設置為每秒 120 次采樣(120Hz)。
- 啟用 SFLP 低功耗模式:最后,啟用 SFLP 游戲旋轉向量特性,確保以低功耗模式運行。
初始化SFLP
開啟嵌入式函數訪問需要向 FUNC_CFG_ACCESS (01h)的EMB_FUNC_REG_ACCESS寫入1進行開啟。

/**
* @brief Change memory bank.[set]
*
* @param ctx read / write interface definitions
* @param val MAIN_MEM_BANK, EMBED_FUNC_MEM_BANK,
* @retval interface status (MANDATORY: return 0 - > no Error)
*
*/
int32_t lsm6dsv16x_mem_bank_set(stmdev_ctx_t *ctx, lsm6dsv16x_mem_bank_t val)
{
lsm6dsv16x_func_cfg_access_t func_cfg_access;
int32_t ret;
ret = lsm6dsv16x_read_reg(ctx, LSM6DSV16X_FUNC_CFG_ACCESS, (uint8_t *)&func_cfg_access, 1);
if (ret != 0) { return ret; }
func_cfg_access.shub_reg_access = ((uint8_t)val & 0x02U) > > 1;
func_cfg_access.emb_func_reg_access = (uint8_t)val & 0x01U;
ret = lsm6dsv16x_write_reg(ctx, LSM6DSV16X_FUNC_CFG_ACCESS, (uint8_t *)&func_cfg_access, 1);
return ret;
}
SFLP_GAME_FIFO_EN 是 LSM6DSV16X 傳感器中 EMB_FUNC_FIFO_EN_A(44h)寄存器的一個設置位。這個特定的位用于控制是否啟用將 SFLP(Sensor Fusion Low Power)算法計算出的游戲旋轉向量(四元數)值存儲到 FIFO(先進先出)緩沖區中的功能。當這個位被設置為 1 時,啟用了這個功能,使得算法計算出的游戲旋轉向量可以批量存儲到 FIFO 緩沖區中。默認值為 0,表示該功能默認是禁用的。


LSM6DSV16X 傳感器的 FIFO_CTRL4 (0Ah) 寄存器配置信息。這個寄存器控制著 FIFO(先進先出)緩沖區的各種操作和數據批處理(batching)的設置。
連續模式,如果 FIFO 已滿,新采集的樣本會覆蓋舊樣本。


在AN5763手冊中,也說明了融合數據會輸出在FIFO中,同時有如下的輸出速率,我們可以配置默認的速率。

最后對EMB_FUNC_EN_A (04h) 寄存器的SFLP_GAME_EN設置為1。


讀取四元數數據
FIFO_STATUS1(1Bh)和 FIFO_STATUS2(1Ch)寄存器中的 DIFF_FIFO [8:0] 字段包含在 FIFO 中收集的字(1 字節標簽 + 6 字節數據)的數量。

/* Read watermark flag */
status=lsm6dsv16x_fifo_status_get(&dev_ctx, &fifo_status);
// Check the number of samples inside FIFO
if (status != LSM6DSV16X_OK) {
printf("LSM6DSV16X Sensor failed to get number of samples inside FIFO");
while (1);
}
fifo_samples = fifo_status.fifo_level;
之后需要通過FIFO_DATA_OUT_TAG (78h)判斷是什么數據準備好,當為SFLP game rotation vector(0X13)時候,為四元數準備完畢。

之后讀取FIFO_DATA_OUT_X_L (79h)到FIFO_DATA_OUT_Z_H (7Eh)共6個字節數據,進行四元數讀取。

最后轉換為姿態角。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
uint16_t fifo_samples;
lsm6dsv16x_fifo_out_raw_t f_data;
/* Read watermark flag */
status=lsm6dsv16x_fifo_status_get(&dev_ctx, &fifo_status);
// Check the number of samples inside FIFO
if (status != LSM6DSV16X_OK) {
printf("LSM6DSV16X Sensor failed to get number of samples inside FIFO");
while (1);
}
fifo_samples = fifo_status.fifo_level;
// Read the FIFO if there is one stored sample
if (fifo_samples > 0) {
for (int i = 0; i < fifo_samples; i++) {
lsm6dsv16x_fifo_out_raw_get(&dev_ctx,&f_data);
if(f_data.tag==LSM6DSV16X_SFLP_GAME_ROTATION_VECTOR_TAG){
LSM6DSV16XSensor_FIFO_Get_Rotation_Vector(&dev_ctx,&quaternions[0]);
// Print Quaternion data
// printf("Quaternion: %.4lf,%.4lf,%.4lf,%.4lfn",quaternions[3],quaternions[0],quaternions[1],quaternions[2]);
q0=quaternions[3];
q1=quaternions[0];
q2=quaternions[1];
q3=quaternions[2];
Pitch = asin(2 * q2 * q3 + 2 * q0* q1)* 57.3; // pitch ,轉換為度數
Roll = atan2(-2 * q1 * q3 + 2 * q0 * q2, q0*q0-q1*q1-q2*q2+q3*q3)* 57.3; // rollv
Yaw = atan2(2*(q1*q2 - q0*q3),q0*q0-q1*q1+q2*q2-q3*q3) * 57.3; //偏移太大,
Roll=Roll*100;
Pitch=Pitch*100;
Yaw=Yaw*100;
data_angular_rate_raw[8]=(int16_t)Roll >>8;//roll
data_angular_rate_raw[7]=(int16_t)Roll;
data_angular_rate_raw[10]=(int16_t)Pitch >>8;//pitch
data_angular_rate_raw[9]=(int16_t)Pitch;
data_angular_rate_raw[12]=(int16_t)Yaw >>8;//yaw
data_angular_rate_raw[11]=(int16_t)Yaw;
sumcheck = 0;
addcheck = 0;
for(uint16_t i=0; i < 14; i++)
{
sumcheck += data_angular_rate_raw[i]; //從幀頭開始,對每一字節進行求和,直到 DATA 區結束
addcheck += sumcheck; //每一字節的求和操作,進行一次 sumcheck 的累加
}
data_angular_rate_raw[14]=sumcheck;
data_angular_rate_raw[15]=addcheck;
HAL_UART_Transmit(&huart1 , (uint8_t *)&data_angular_rate_raw, 16, 0xFFFF);
// printf("Roll=%.2f,Pitch=%.2f,Yaw=%.2fn",Roll,Pitch,Yaw);
}
}
}
HAL_Delay(10);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
演示

審核編輯:湯梓紅
-
傳感器
+關注
關注
2553文章
51390瀏覽量
756586 -
mems
+關注
關注
129文章
3958瀏覽量
191100 -
陀螺儀
+關注
關注
44文章
792瀏覽量
98976 -
AI
+關注
關注
87文章
31513瀏覽量
270333
發布評論請先 登錄
相關推薦
陀螺儀LSM6DSV16X與AI集成(1)----輪詢獲取陀螺儀數據

陀螺儀LSM6DSV16X與AI集成(7)----FIFO數據讀取與配置

陀螺儀LSM6DSOW開發(3)----FIFO數據讀取與配置

陀螺儀LSM6DSV16X與AI集成(11)----融合磁力計進行姿態解算

LSM6DSV16X基于MLC智能筆動作識別(2)----MLC數據采集
陀螺儀LSM6DSV16X與AI集成(13)----中斷獲取SFLP四元數
陀螺儀LSM6DSV16X與AI集成(14)----上報匿名上位機
請問lsm6dsv16x可以直接讀取觸摸手勢嗎?
求助,是否有在LSM6DSV16X中使用傳感器融合低功耗算法的示例
ST LSM6DSV16X iNEMO慣性模塊相關的使用信息和應用提示
陀螺儀LSM6DSV16X與AI集成(5)----6D方向檢測功能
LSM6DSV16X基于MLC智能筆動作識別(1)----輪詢獲取陀螺儀數據
LSM6DSV16X基于MLC智能筆動作識別(4)----中斷獲取智能筆狀態





 工商網監
工商網監
評論