") 智行者科技發(fā)布基于***的“重感知、輕地圖”智駕解決方案
智行者科技發(fā)布基于***的“重感知、輕地圖”智駕解決方案
今年4月份,智行者宣布成功獲得某頭部車(chē)企量產(chǎn)定點(diǎn)合作,成為國(guó)內(nèi)首家基于***的軟硬件一體高階自動(dòng)駕駛系統(tǒng)方案供應(yīng)商。
時(shí)隔半年,智行者發(fā)布首個(gè)基于***的“重感知、輕地圖”的智能駕駛解決方案,標(biāo)志著智行者在核心技術(shù)方向的又一次躍遷。
目前,智行者輕地圖方案已在自研的域控制器A200上部署實(shí)現(xiàn),得益于A200的量產(chǎn)質(zhì)量保證,該方案已穩(wěn)定運(yùn)行半年。A200是智行者推出的以國(guó)產(chǎn)大算力SoC和安全MCU為核心芯片的高性?xún)r(jià)比域控制器,其中SoC主要負(fù)責(zé)感知模型神經(jīng)網(wǎng)絡(luò)的高效處理,MCU主要負(fù)責(zé)車(chē)輛控制、安全監(jiān)控等。
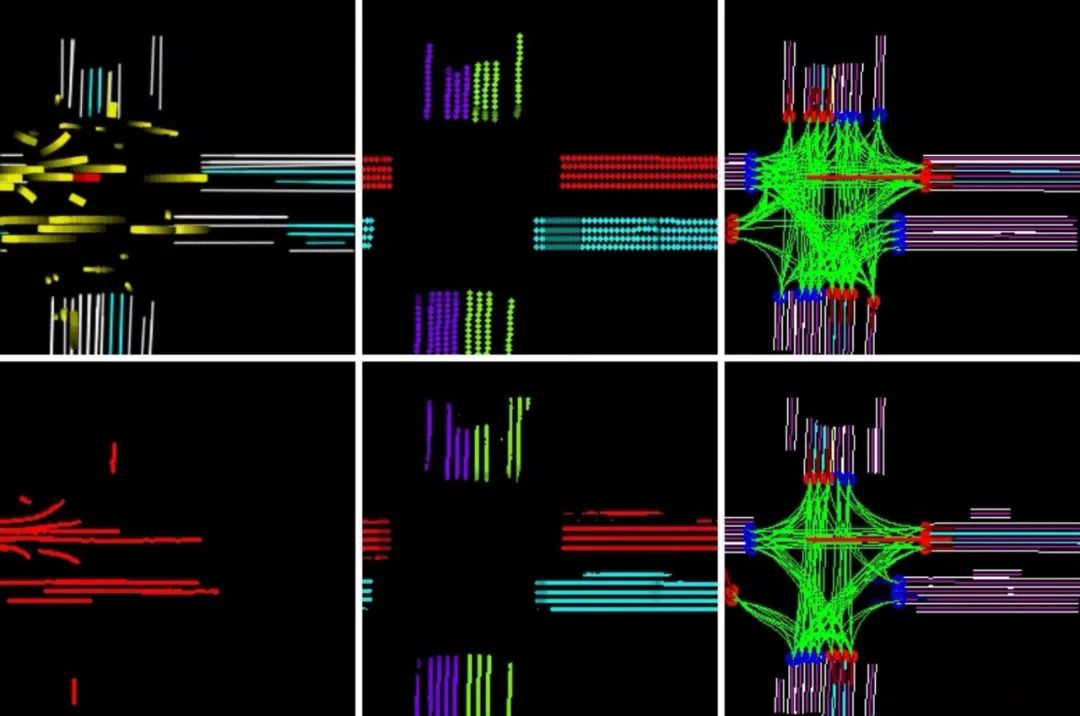
感知方案基于BEV框架,利用BEV特征融合方法完成目標(biāo)檢測(cè)、車(chē)道線、可行駛區(qū)域分割等任務(wù)。在該感知框架中,智行者采用基于BEV Queries的方法,通過(guò)將BEV Query的空間位置投影到各個(gè)視角,通過(guò)注意力機(jī)制對(duì)相關(guān)視角信息進(jìn)行融合得到該Query的特征。同時(shí),針對(duì)感知系統(tǒng)的空間碎片化問(wèn)題,設(shè)計(jì)了一個(gè)時(shí)序特征融合模塊,將歷史時(shí)刻的BEV特征和當(dāng)前時(shí)刻的BEV特征融合得到最終時(shí)空特征。基于該融合特征,系統(tǒng)可實(shí)現(xiàn)人車(chē)目標(biāo)檢測(cè)、路面標(biāo)線檢測(cè)、可行駛區(qū)域分割、標(biāo)志牌檢測(cè)識(shí)別等多個(gè)感知任務(wù)。
在感知方案中,模型的工程化部署尤為重要。智行者充分利用***的強(qiáng)大計(jì)算能力與多核心架構(gòu),將計(jì)算任務(wù)進(jìn)行適當(dāng)?shù)姆峙浜筒⑿刑幚恚⒃谀P途群托手g進(jìn)行平衡設(shè)計(jì),以提高感知模型的計(jì)算效率。基于多級(jí)流水設(shè)計(jì),對(duì)BEV感知模型的算子進(jìn)行了DSP移植,將通用算力釋放到模型的其他部分。這種優(yōu)化設(shè)計(jì)可以提高感知模型的運(yùn)行效率并降低計(jì)算延遲,使得模型能夠在實(shí)時(shí)場(chǎng)景下快速響應(yīng)和處理感知數(shù)據(jù)。目前基于BEV的感知框架能夠以20Hz以上幀率穩(wěn)定運(yùn)行,保證了對(duì)環(huán)境的實(shí)時(shí)感知和準(zhǔn)確判斷。
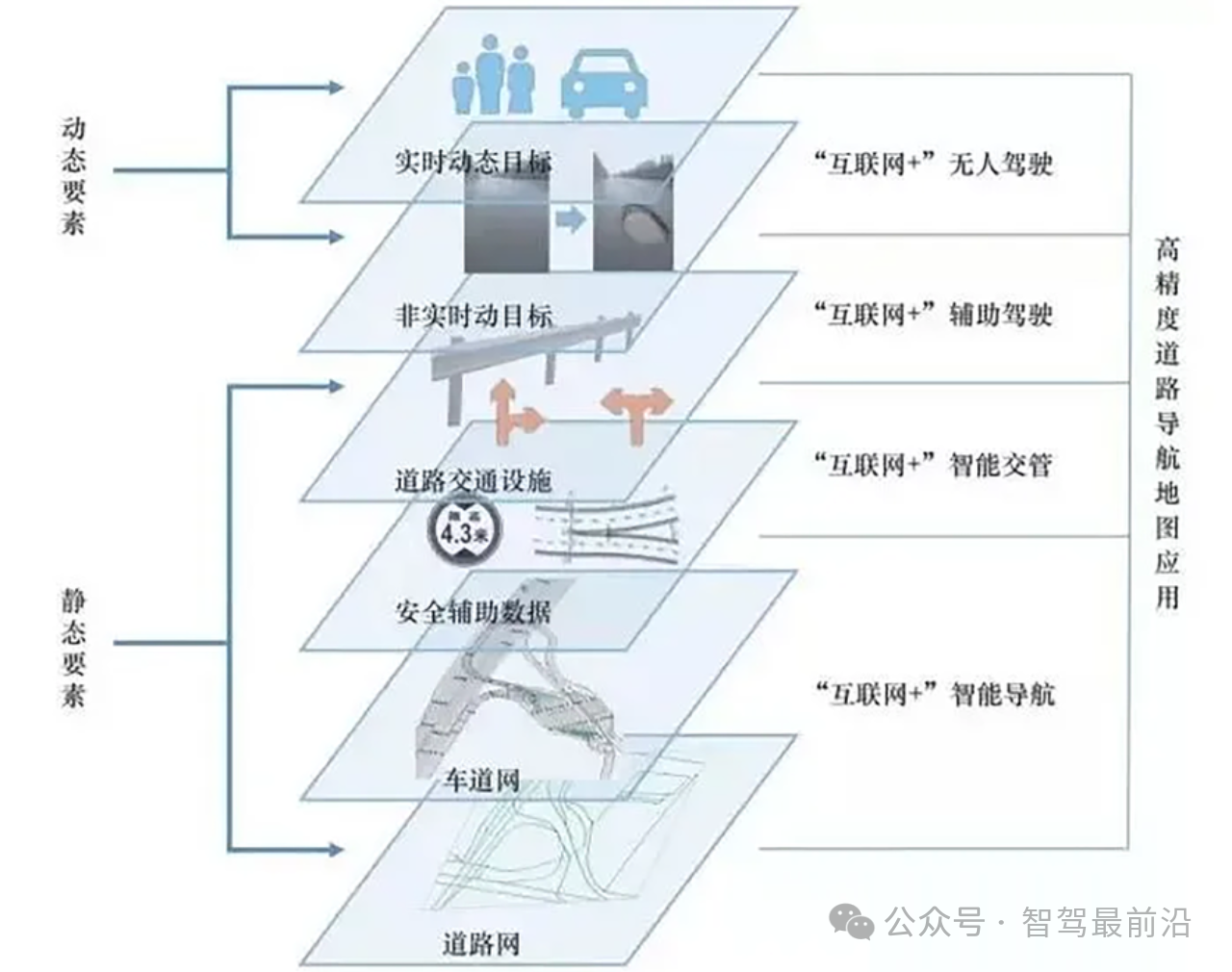
基于BEV感知模型輸出的動(dòng)靜態(tài)環(huán)境信息,智行者進(jìn)一步融合了導(dǎo)航地圖的先驗(yàn)信息,提出了能夠端到端重構(gòu)自動(dòng)駕駛車(chē)輛周?chē)缆翻h(huán)境拓?fù)湫畔⒌腡opology Flow模型。該模型不僅以BEV感知模型輸出的靜態(tài)車(chē)道線和道路標(biāo)識(shí)為輸入,還融合了動(dòng)態(tài)障礙物的行駛軌跡和標(biāo)準(zhǔn)導(dǎo)航地圖的結(jié)構(gòu)化信息,對(duì)感知盲區(qū)和更遠(yuǎn)范圍的道路拓?fù)浣Y(jié)構(gòu)進(jìn)行推理預(yù)測(cè)。
Topology Flow模型旨在輸出下游規(guī)控模塊所需要的地圖環(huán)境信息,除車(chē)道中心線和車(chē)道拓?fù)潢P(guān)系,還輸出各種地圖的關(guān)鍵點(diǎn)信息,重構(gòu)出常規(guī)高精地圖中存在的各種虛擬道路和標(biāo)識(shí),實(shí)現(xiàn)從有圖方案無(wú)縫銜接到輕地圖方案。
以下為智行者輕地圖方案高速NOA功能的實(shí)車(chē)路測(cè)展示。當(dāng)前輕地圖方案可以從容處理高速巡航、超車(chē)換道、上下匝道、智慧避讓等功能。同時(shí),對(duì)他車(chē)近距離切入、大曲率轉(zhuǎn)彎等特殊場(chǎng)景也能夠平穩(wěn)應(yīng)對(duì)。憑借技術(shù)的迭代與升級(jí),為乘客提供媲美有圖方案的乘車(chē)體驗(yàn)。
憑借領(lǐng)先的技術(shù)優(yōu)化和豐富的工程經(jīng)驗(yàn),智行者可為客戶(hù)提供模塊化的全棧軟硬件解決方案,包括:標(biāo)準(zhǔn)化的視覺(jué)感知、激光感知、匹配定位模型;面向智能駕駛的中間件軟件,協(xié)助客戶(hù)快速進(jìn)行功能開(kāi)發(fā);車(chē)規(guī)級(jí)高性?xún)r(jià)比的域控制器;基于圖形化的數(shù)據(jù)采集、數(shù)據(jù)挖掘、模型訓(xùn)練與測(cè)評(píng)的數(shù)據(jù)閉環(huán)平臺(tái)等。
-
智能駕駛
+關(guān)注
關(guān)注
3文章
2590瀏覽量
48920 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
785文章
13931瀏覽量
167008 -
國(guó)產(chǎn)芯片
+關(guān)注
關(guān)注
2文章
269瀏覽量
29882 -
智行者科技
+關(guān)注
關(guān)注
0文章
27瀏覽量
1044
原文標(biāo)題:再進(jìn)化!智行者發(fā)布基于國(guó)產(chǎn)芯片的“重感知、輕地圖”智駕解決方案
文章出處:【微信號(hào):idriverplus,微信公眾號(hào):智行者科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
HERE攜手亞馬遜云科技創(chuàng)新AI地圖解決方案,加速軟件定義汽車(chē)發(fā)展
輕舟智航中高階智駕解決方案再獲項(xiàng)目定點(diǎn)
中科慧眼再獲多家頭部商用車(chē)主機(jī)廠量產(chǎn)定點(diǎn)
中海達(dá)推出輕量化監(jiān)測(cè)簡(jiǎn)易感知解決方案
如祺出行在2024廣州車(chē)展發(fā)布數(shù)據(jù)閉環(huán)飛輪
億佰特污水監(jiān)控系統(tǒng)智能解決方案,精確感知、精細(xì)管理!

軒轅智駕紅外感知智駕系統(tǒng)助力吉利翼真L380上市
拋棄高精度地圖舊模式,走向視覺(jué)感知新時(shí)代?
NNG宣布為Dacia汽車(chē)提供基于OpenStreetMap的地圖解決方案
大疆車(chē)載與高通聯(lián)合發(fā)布基于高通智駕芯片SA8650P的智駕方案
Momenta推出基于NVIDIA DRIVE Orin芯片的高階智能駕駛解決方案
地平線發(fā)布新一代Horizon SuperDrive?全場(chǎng)景智能駕駛解決方案

華為發(fā)布智能汽車(chē)全套解決方案,覆蓋核心部件
廣汽埃安推出國(guó)內(nèi)首個(gè)無(wú)圖純視覺(jué)智能駕駛解決方案—Garcia智駕系統(tǒng)

vivo與瑞聲科技創(chuàng)新合作,為X Fold3量身打造超輕薄觸聽(tīng)解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論