 用于水質和病毒監測的電驅動軟體機器人開發
用于水質和病毒監測的電驅動軟體機器人開發
微小型軟體機器人是近年來機器人領域的重要分支,在狹小空間工程探索、生物體內藥物遞送、體內醫療診斷等領域扮演著重要角色。近日,香港城市大學于欣格團隊聯合大連理工大學解兆謙、北京航空航天大學常凌乾教授,合作開發了一款無源無線的電驅動軟體機器人。
該軟體機器人系統從無線化設計和多功能傳感入手,實現了小型化軟體機器人在封閉空間中對液體環境的物理、化學和生物各項指標的無線化監測。研究成果以Battery-free, wireless, and electricity-driven soft swimmer for water quality and virus monitoring(用于水質和病毒監測的無電池、無線、電力驅動的軟體游泳機器人)為題,于2024年1月10日發表于Science開放獲取子刊Science Advances雜志。
小尺寸機器人有能力在狹小和封閉空間中運動穿梭,因此,小尺寸機器人是在此類場景下(包括生物體內)執行環境監測或生物醫學檢測的一個理想裝置。
為實現此類任務,機器人裝置首先需要是無線的,任何繩索的牽絆都會限制其自由運動,這就要求機器人驅動和傳感數據讀取必須是無線化的;另外,機器人需具備多重傳感能力,傳感指標的多少關系到機器人監測能力和智能化的強弱;如此多的功能要求往往依靠于在機器人系統之中集成更多的模塊,而這勢必對機器人的小型化帶來挑戰。
針對上述問題,研究團隊利用純電學方式開發出了一款小型的、無線的、無電池的、電驅動機器人系統,可在封閉的水環境中實現多項指標的監測。首先,通過射頻供電方式,電驅動機器人系統不需要安裝電池就可以在封閉空間中不受束縛的運動,在特定驅動頻率下,機器人可展現出諧振特性,并進行快速地游動。無電池化設計避免了機器人系統在尺寸和重量上的增加。
進一步地,該系統采用了柔性電子技術,集成了薄型輕質的多功能生物化學傳感器和無線化數據采集模塊,傳感器可對水中離子和病毒濃度進行檢測,所有檢測數據均同步傳輸,并通過近場通信技術顯示在智能手機圖形用戶界面上,最終實現對水質和病原體污染情況的實時評估。
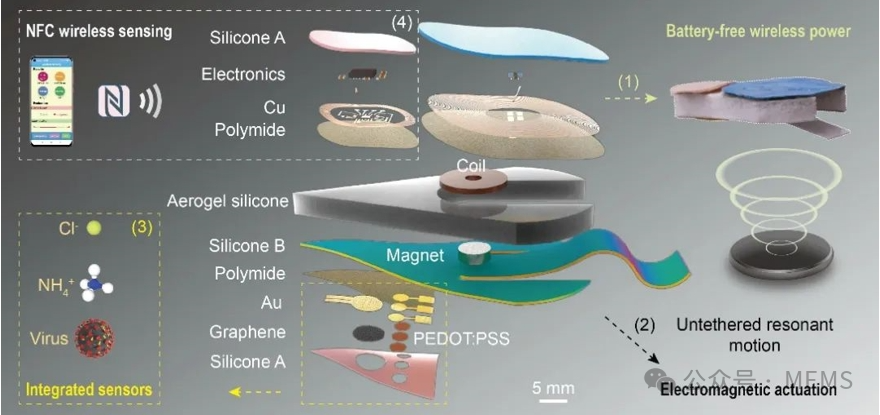
無源無線軟體機器人監測系統的總體構造和功能圖
該研究以管道場景為例子,展現了此小型軟體機器人系統在封閉環境下對溫度、離子和病毒的檢測能力。該研究展現了在封閉空間下,機器人驅動的無線化和無電池化,并且無需取出機器人裝置即可無線化地讀取監測數據。此無線化技術,亦可用于開發體內生物醫用軟體機器人系統,以實現機器人的體內監測和體內主動醫療功能。
香港城市大學生物醫學工程學系于欣格教授、大連理工大學力學工程系解兆謙教授、北京航空航天大學生物與醫學工程學院常凌乾教授為論文通訊作者。論文共同第一作者為香港城市大學生物醫學工程學系研究員李登峰、博士生周靖昆和黃星燦、博士后李虎,以及大連理工大學力學工程系博士生趙紫晨。該研究得到了國家自然科學基金、科技部重點研發計劃、香港研究資助局、香港創新科技署、國家重點研發計劃等項目的資助。
審核編輯:劉清
-
傳感器
+關注
關注
2553文章
51407瀏覽量
756638 -
數據采集
+關注
關注
39文章
6255瀏覽量
114053 -
軟體機器人
+關注
關注
1文章
111瀏覽量
11764
原文標題:用于水質和病毒監測的電驅動軟體機器人
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Atlas轉型電驅,純電+AI正在加速通用人形機器人落地

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
高壓放大器在水下撲翼軟體機器人研究中的應用


高壓放大器在介電彈性體折紙術軟體機器人中的應用

清華大學:軟體機器人柔性傳感技術最新研究進展

ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
Al大模型機器人
abb工業機器人的編程語言是什么
全球機器人開發領域采用NVIDIA 機器人開發和生產
Aigtek:介電彈性體高壓放大器在軟體機器人研究中的應用

基于計算設計的超魯棒性應變傳感器,實現軟體機器人的感知和自主性






 工商網監
工商網監
評論