 qCMOS相機與EM-CCD相機 – 光子計數相機的性能比較
qCMOS相機與EM-CCD相機 – 光子計數相機的性能比較
在提供適合客戶需求的科學相機時,傳統趨勢是使用超靈敏 EM-CCD(電子倍增 CCD)相機在極低光照區域進行測量,以及大像素數的 sCMOS(科學 CMOS)相機,在相對明亮的區域具有高速度和高動態范圍。與此同時,CMOS技術不斷發展,特別是在噪聲特性方面,我們發布了配備qCMOS(定量CMOS)傳感器的相機,這是一種標志著圖像傳感器新時代的曙光的新傳感器。
qCMOS 相機被定位為超靈敏相機,由于其極低的噪聲性能,可提供終極定量成像。因此,在比較 qCMOS 和 EM-CCD 相機時,有必要判斷哪種相機最適合您的應用。本文的目的是比較 qCMOS 和 EM-CCD 相機,以幫助您選擇最適合您的應用的相機。
傳感器技術和光子探測性能
本節介紹從信號采集到后續數字輸出的過程,以比較傳感器技術和qCMOS和EM-CCD相機的光子檢測性能。
圖1顯示了相機從信號采集到數字輸出的過程。入射到傳感器上的光子根據傳感器的量子效率以概率轉換為光電子。然后,光電子被轉換為電壓并由浮動擴散放大器(FDA)放大,隨后由模數轉換器(ADC)轉換為數字值,最后輸出數字值。
在科學相機中,這一過程中的噪聲特性極大地影響了極低光區域的測量。特別是,對于超靈敏相機來說,在光電子信號的數字轉換中盡可能降低讀出噪聲非常重要。
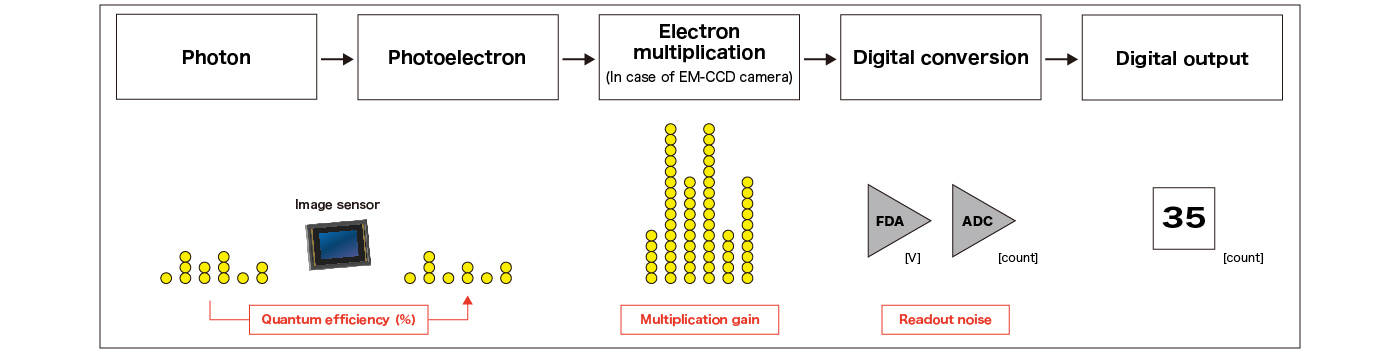
圖 1.從信號采集到數字輸出的過程
qCMOS和EM-CCD相機使用不同的方法來降低讀出噪聲,從而能夠在單個光電子水平上檢測信號。
qCMOS相機采用超精細CMOS電路技術,可實現極低的讀出噪聲。如圖2所示,當分別讀出1、2、3、...的光電子信號時,qCMOS讀出噪聲足夠低于信號,無法從輸出結果中精確地確定光電子的數量。通過這種方式,qCMOS相機提供了最終的定量成像,以便可以區分輸入的光電子數。
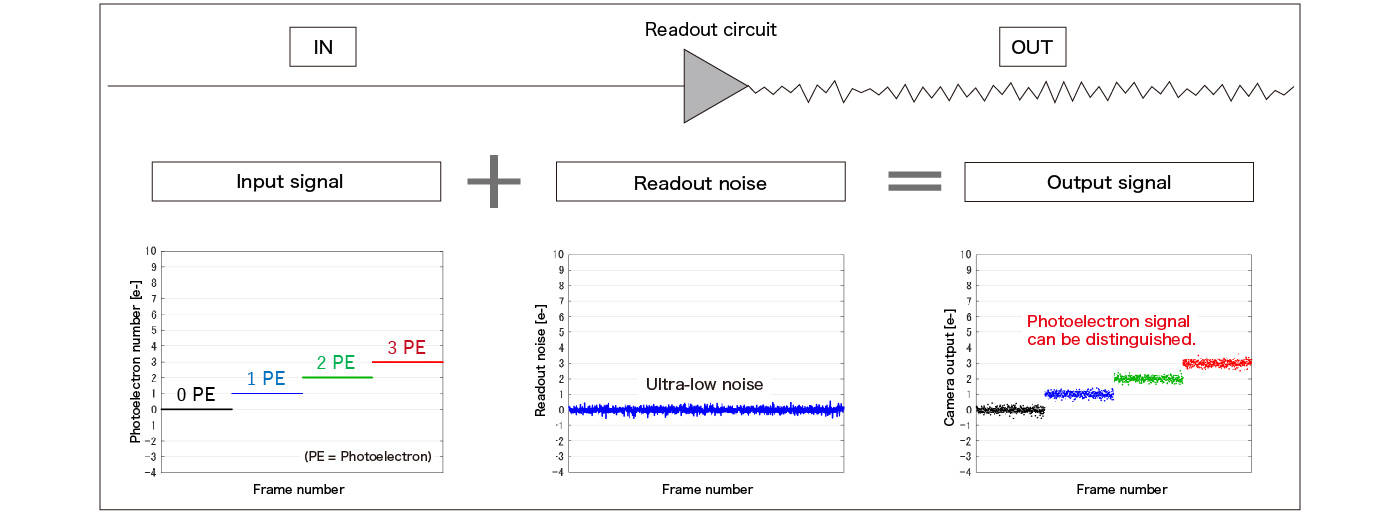
圖2.qCMOS相機中的讀出過程和光子數解析
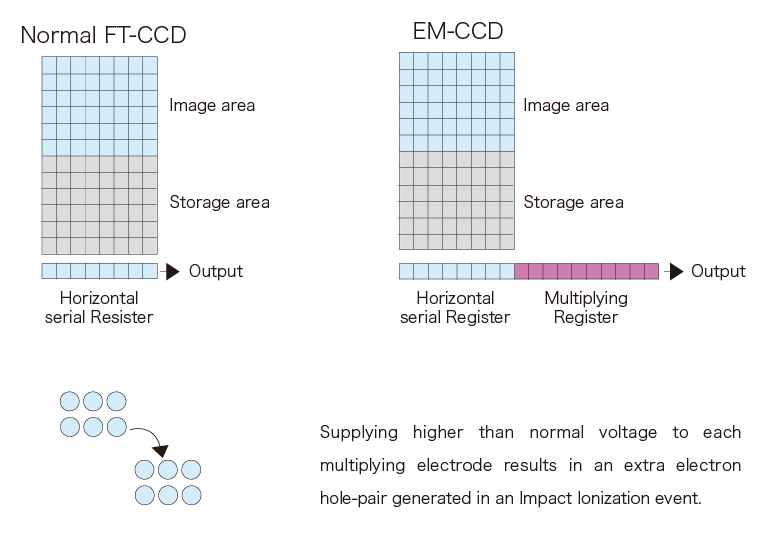
或者,使用EM-CCD相機,雖然讀出噪聲本身非常大,但光電子信號通過電子倍增機制增加(如圖1所示),與圖3所示的增益信號相比,讀出噪聲相對降低。
然而,由于探測器中的倍增過程總是在信號中產生較大的波動,稱為過量噪聲,因此即使與信號相比,讀出噪聲相對最小,EM-CCD也無法區分原始光電子數。因此,盡管EM-CCD相機可以通過電子倍增來檢測讀出噪聲低的單光子級信號,但由于噪聲過大,定量特性會丟失。
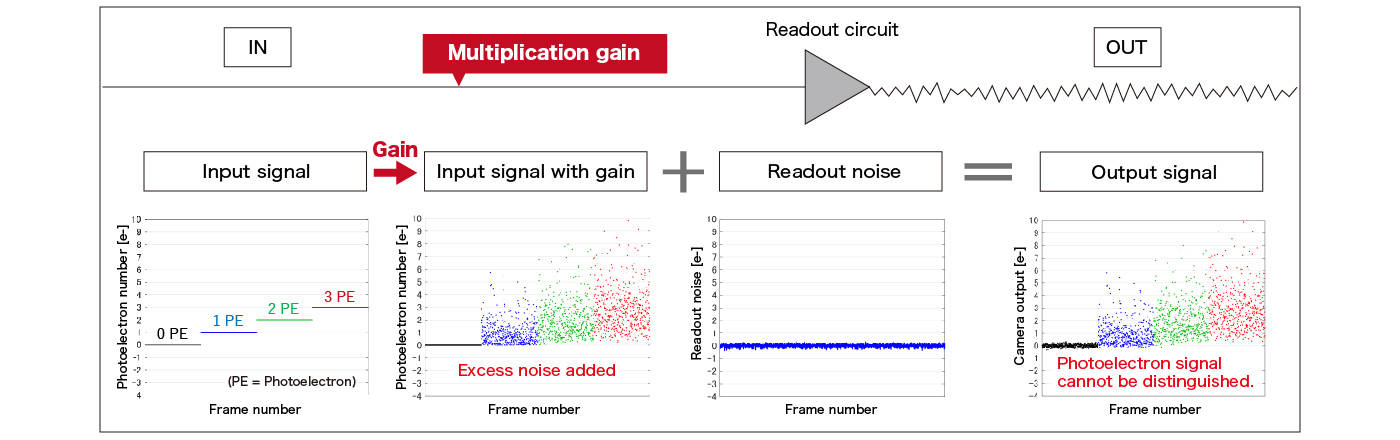
圖3.EM-CCD相機中的讀出過程和光子數解析
表1總結了本節中描述的qCMOS和EM-CCD相機的功能比較。
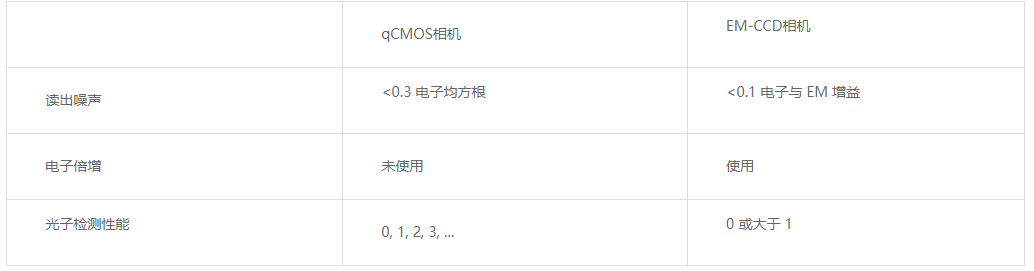
表 1.qCMOS和EM-CCD相機的功能比較
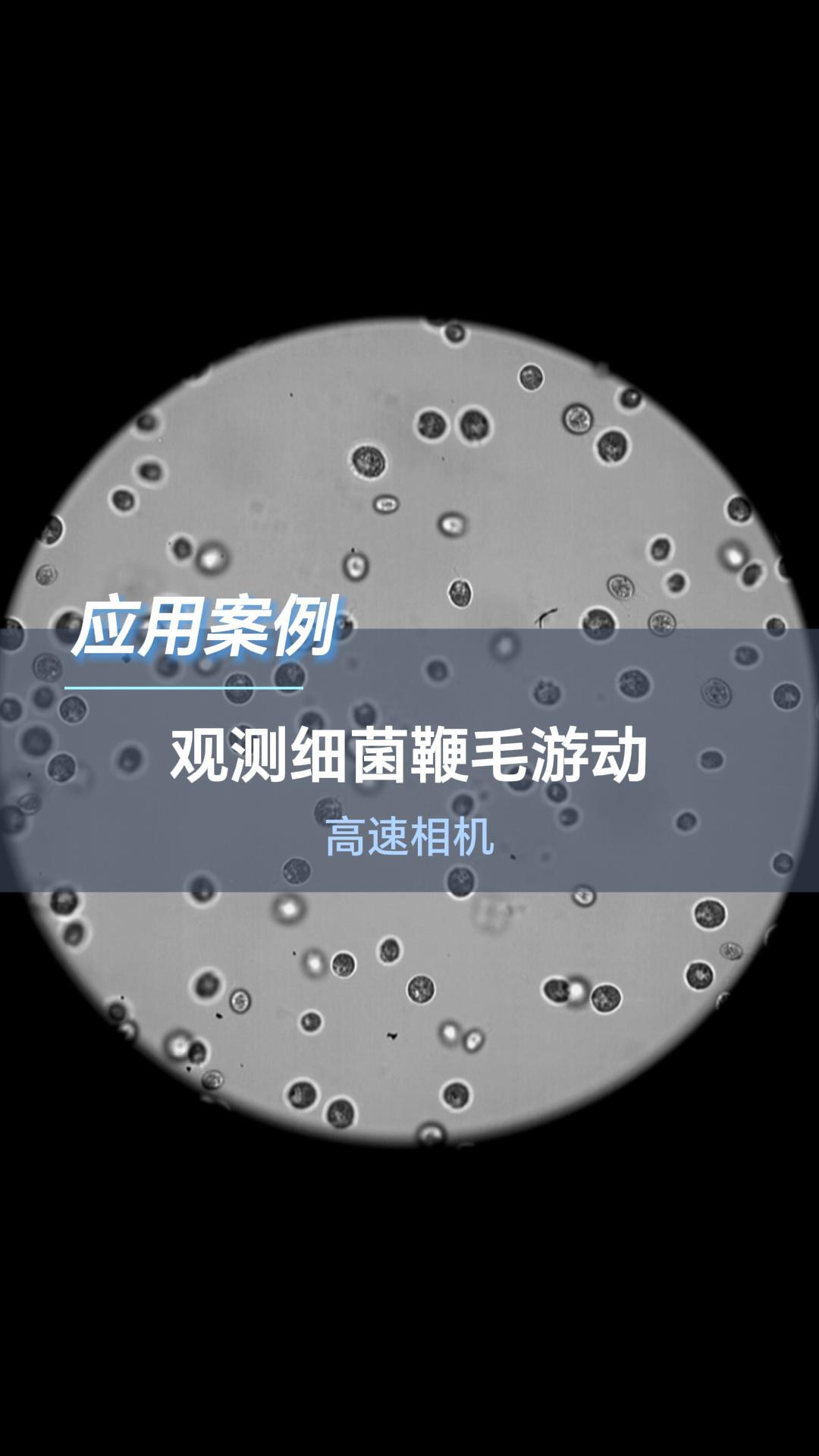
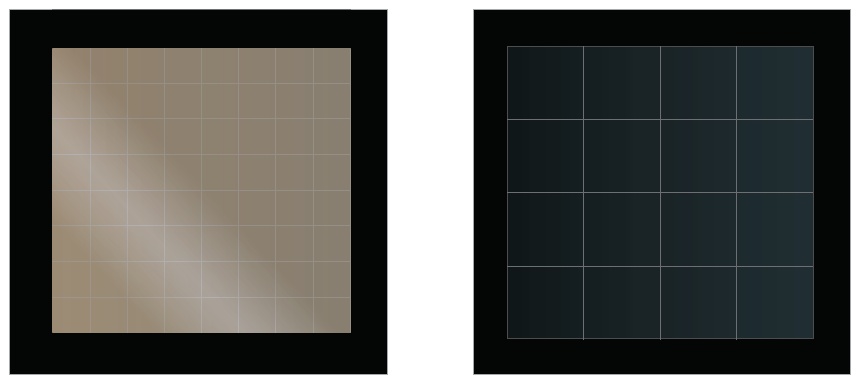
此外,下面還顯示了qCMOS相機和EM-CCD相機之間的實際成像示例。
可以看出,與EM-CCD相機相比,不使用電子倍增的qCMOS相機具有更小的圖像幀間波動,從而實現了高度定量成像。
SNR(信噪比)與像素尺寸考慮因素的比較
本節通過SNR(信噪比)比較qCMOS和EM-CCD相機,SNR通常用于相機性能的定量討論。
圖4顯示了SNR的公式。(此處省略了EM-CCD中的暗電流和時鐘感應電荷(CIC)噪聲。
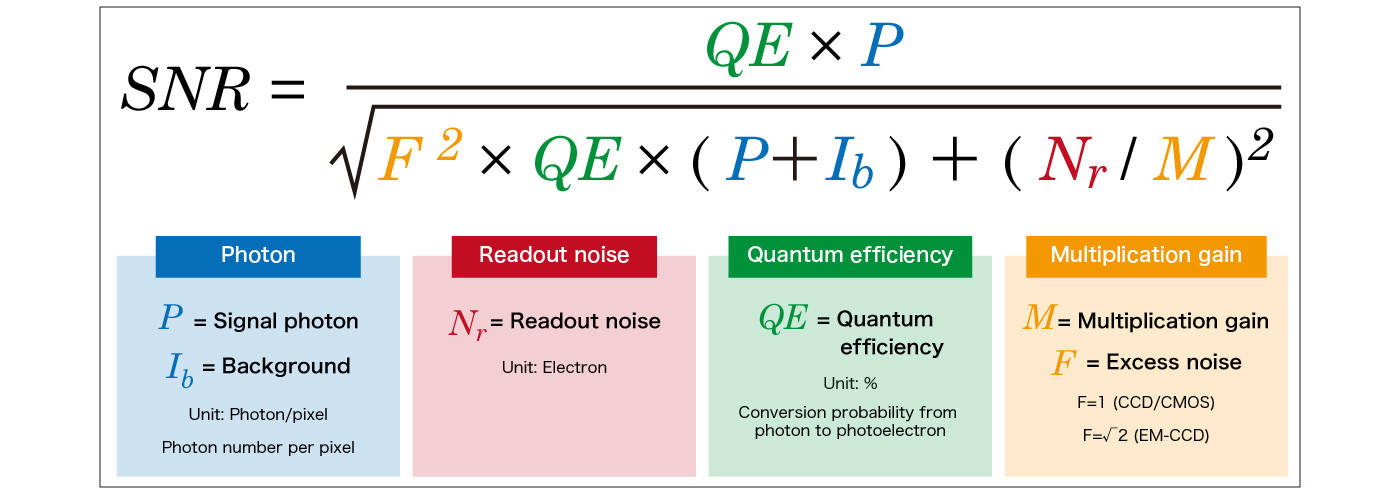
圖4.信噪比公式
信噪比取決于傳感器的入射光量,因此在按入射光水平比較多個相機時,通常有兩個條件需要比較,即:
1.當每個像素的光子強度相等時
2.當每個傳感器區域的光子強度相等時
圖5顯示了qCMOS(ORCA-Quest)、EM-CCD(ImagEM X2)和第三代sCMOS(ORCA-Fusion BT,前幾代ORCA-Quest)在每像素光強相等時的SNR比較,圖6顯示了每個傳感器區域的光強度相等時的SNR比較。這些圖表顯示了相對信噪比 (rSNR),其中所有數據都歸一化為像素尺寸為 6.5 μm、零噪聲和 100% QE 的假想“完美相機”。
讓我們看一下每個像素的光強度相等的情況(圖 5)。這種情況假設最佳光學系統是針對每個相機的像素大小構建的。在CMOS相機中,SNR也會隨著光強度的降低而降低,因為無論光強度如何,讀出噪聲都是恒定的。另一方面,EM-CCD相機使用乘法來最小化讀出噪聲,因此信噪比隨光照水平變化不大,但由于倍增波動的持續存在,信噪比在明亮區域區域的SNR小于CMOS相機。因此,傳統趨勢是sCMOS相機在明亮區域更勝一籌,而EM-CCD相機在低光區域更勝一籌。然而,隨著CMOS技術的最新發展,即使在0.1光子/像素/幀下,qCMOS相機在極低光度區域的SNR也與EM-CCD相機相當。
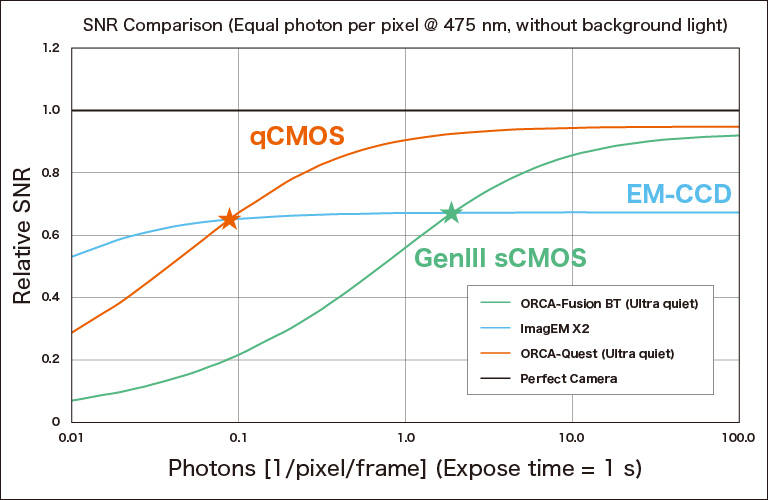
圖5.每像素光強度相等時的信噪比比較
接下來,讓我們看一下每個傳感器區域的光強度相等的情況(圖 6)。這種情況假設相機更換為光學元件不變。由于CMOS相機的像素尺寸比EM-CCD相機小,因此每個像素的光量更小,因此本比較包括CMOS相機的SNR數據,與EM-CCD相比,CMOS相機具有合并功能,可將等效的光量輸入到像素單元中。
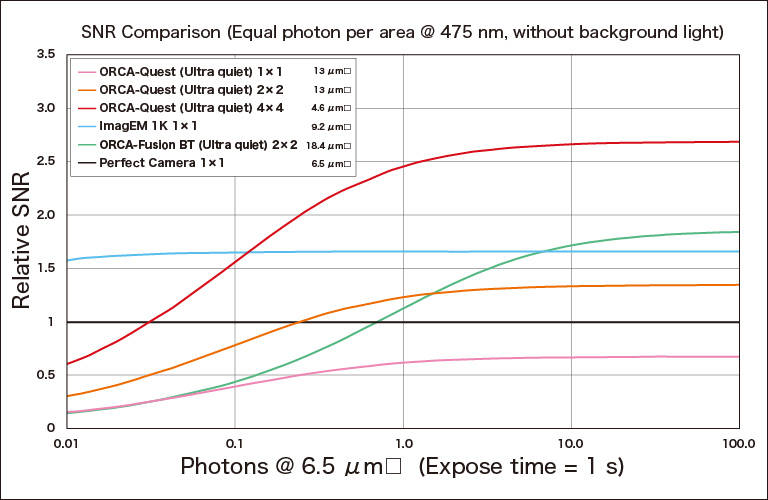
圖6.每個傳感器區域的光強度相等時的信噪比比較
表2顯示了比較條件和適合這些條件的實際情況。
由于CMOS傳感器的架構,當執行NXN像素合并時,每個像素合并像素的讀出噪聲比單個像素的讀出噪聲增加N倍。因此,在用qCMOS相機替換像素尺寸較大的相機時,建議構建一個針對qCMOS相機像素尺寸進行優化的光學系統,而無需合并,以最大限度地提高其性能,以便進行公平的比較。

表 2.信噪比比較條件及相應情況
qCMOS相機的多功能性
將qCMOS相機與EM-CCD相機進行比較時,qCMOS相機的優勢之一是多功能性。qCMOS相機是一種混合相機,它結合了傳統sCMOS相機的優點和與EM-CCD相當的極低噪聲。以下是可以使用qCMOS相機的應用列表。
● 具有極致定量性的超靈敏成像,能夠以較慢的幀速率解析光子數。
● 高幀率高靈敏度成像(EM-CCD中的幀速率較慢)
● 高動態范圍的高靈敏度成像(EM-CCD因電子倍增而犧牲動態范圍)
● 寬視場和高分辨率成像,像素數大
● CMOS相機中的旗艦暗電流性能,適用于需要長時間曝光的應用
EM-CCD相機的主要區域
圖5和圖6中的相對SNR比較表明,EM-CCD相機在低于0.1光子/像素/幀的極低光區域性能優于qCMOS相機。然而,0.1光子/像素/幀的“絕對信噪比值”非常小,以至于樣本幾乎看不見,埋在噪聲中。圖 7 顯示了使用 Hamamatsu Photonics 的相機仿真引擎對測試圖表樣本(入射光水平:0.1、0.5、1.0、10 個光子/像素/幀,波長:475 nm,成像區域:512X512 像素,背景光:0,每個圖像相對于自身自動縮放)的圖像模擬。如這些圖像所示,兩臺相機都無法在0.1光子/像素/幀下檢測到大部分樣本,因此這意味著EM-CCD在這種光水平下的SNR優勢毫無意義。
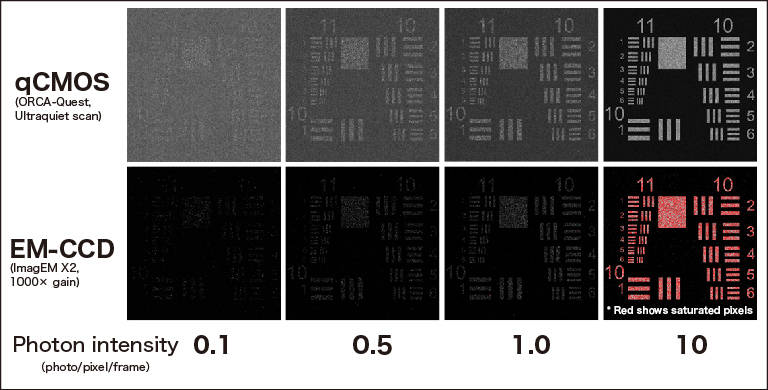
圖7.弱光區域測試圖表樣品仿真結果
EM-CCD相機使用電子倍增來盡可能減少讀出噪聲,因此在沒有背景光的情況下,黑暗區域幾乎沒有噪聲,如圖7所示。然而,在存在背景光的實際情況下,背景光也會成倍增加,從而在黑暗區域產生明顯的噪點。
對于這種極低光區域的應用,成像通常在非常長的曝光時間下進行,以實現可觀察到的信噪比,例如超過 1 個光子/像素/幀。在這種情況下,EM-CCD相機在極低光下區域進行長時間曝光時仍然比qCMOS相機具有優勢,因為傳感器的冷卻性能實現了極低的暗電流。
EM-CCD是一種成熟的傳感器技術,由于CMOS技術的不斷發展,其優勢正在逐漸喪失。然而,在實驗中,仍然需要根據光照水平和曝光時間來判斷qCMOS相機或EM-CCD相機是否具有更好的SNR。
結論
qCMOS相機是一種混合相機,它結合了傳統sCMOS相機的優點和相當于EM-CCD相機的極低噪聲,因此qCMOS相機將為傳統的科學測量帶來新的突破。
隨著CMOS技術的不斷發展,qCMOS傳感器將變得更好。我們希望本文能成為客戶了解qCMOS相機新技術的起點,并通過比較其與其他光子計數探測器(如EM-CCD)的性能來選擇理想探測器。
審核編輯 黃宇
-
傳感器
+關注
關注
2553文章
51393瀏覽量
756597 -
CMOS
+關注
關注
58文章
5735瀏覽量
236092 -
光子
+關注
關注
0文章
111瀏覽量
14463
發布評論請先 登錄
相關推薦
電子倍增CCD圖像傳感器(EM-CCD)
使用EM-CCD和qCMOS?相機ORCA? -Quest進行單分子顯微成像的比較

采用背照式技術的新型科學 CMOS 相機
靈活的電子架構擴展了科學相機的實用性


基于FPGA的CCD工業相機系統設計
基于SPAD單光子相機的LiDAR技術革新

EMCCD相機與ICCD相機在三個性能上的比較分析
針尖增強拉曼散射中的 qCMOS 相機評估
相機標定技術的性能分析與工具比較
面陣相機和線陣相機的區別





 工商網監
工商網監
評論