 更智能更柔性化,AGV導航方式的創新與演進!
更智能更柔性化,AGV導航方式的創新與演進!
高效、低成本的物料運輸是許多制造工廠和倉庫改進運營 情況的一項重要措施。AGV小車可以實現高效的、低成本的物料運輸,并且在安全性方面,與其他的材料運輸方法相比, AGV是非常安全的,特別是與人工搬運的方式相比較。
AGV的主要優點之一是它們不會破壞人員或基礎設施。事實確實如此,AGV比傳統的手動車輛如傳統叉車更安全。
AGV的導航是指其決定AGV運行方向和路徑的方法。目前常用的AGV導航導引方式主要有磁導引、電磁導引、光帶導引、慣性導航、激光導航、視覺導航、二維碼導航、直接坐標導航、GPS導航等9種導航方式。
可以說AGV的技術發展史,也就是AGV導航導引方式的演進史。隨著技術的變革與應用,AGV導航方式也從最初的固定路徑導引(電磁導引),發展到半固定路徑導引(磁導引和光帶導引),再發展到自由路徑導引(如基于“燈塔”信息的激光導航、GPS導航,基于地標信息的慣性導航、標簽導航,基于環境信息的環境導航或自然導航等)。隨著導航技術的發展,AGV對特定標志物的依賴逐漸較少,對環境的適應性則逐漸增強。

AGV小車激光導航
最初的激光導航需要反射板來做輔助,稱為反射板激光導航模式,即在AGV行駛路徑的周圍安裝位置精確的激光反射板,AGV通過發射激光束,同時采集由反射板反射的激光束,來確定其當前的位置和方向,并通過連續的三角幾何運算來實現AGV的導航。依據同樣的導航原理,若將激光掃描器更換為紅外發射器或超聲波發射器,則反光板激光導航可以變為紅外導航或超聲波導航。

AGV無人叉車
激光導航的主要優點為定位精確,能適應復雜的路徑條件及工作環境,能快速變更行駛路徑和修改運行參數;主要缺點則為激光定位裝置成本較高。對環境要求(如外界光線、地面要求、能見度要求等)相對較高,不適合室外(尤其是易受雨、雪、霧的影響)應用。
目前,基于SLAM(Simultaneouslocalization and mapping,同步定位與地圖創建)技術的無反射板激光導航,由于突破了諸多局限,實現了AGV在復雜環境下也能精準定位、快速部署而備受關注,成為許多AGV廠商的研發方向。

AGV非標定制車
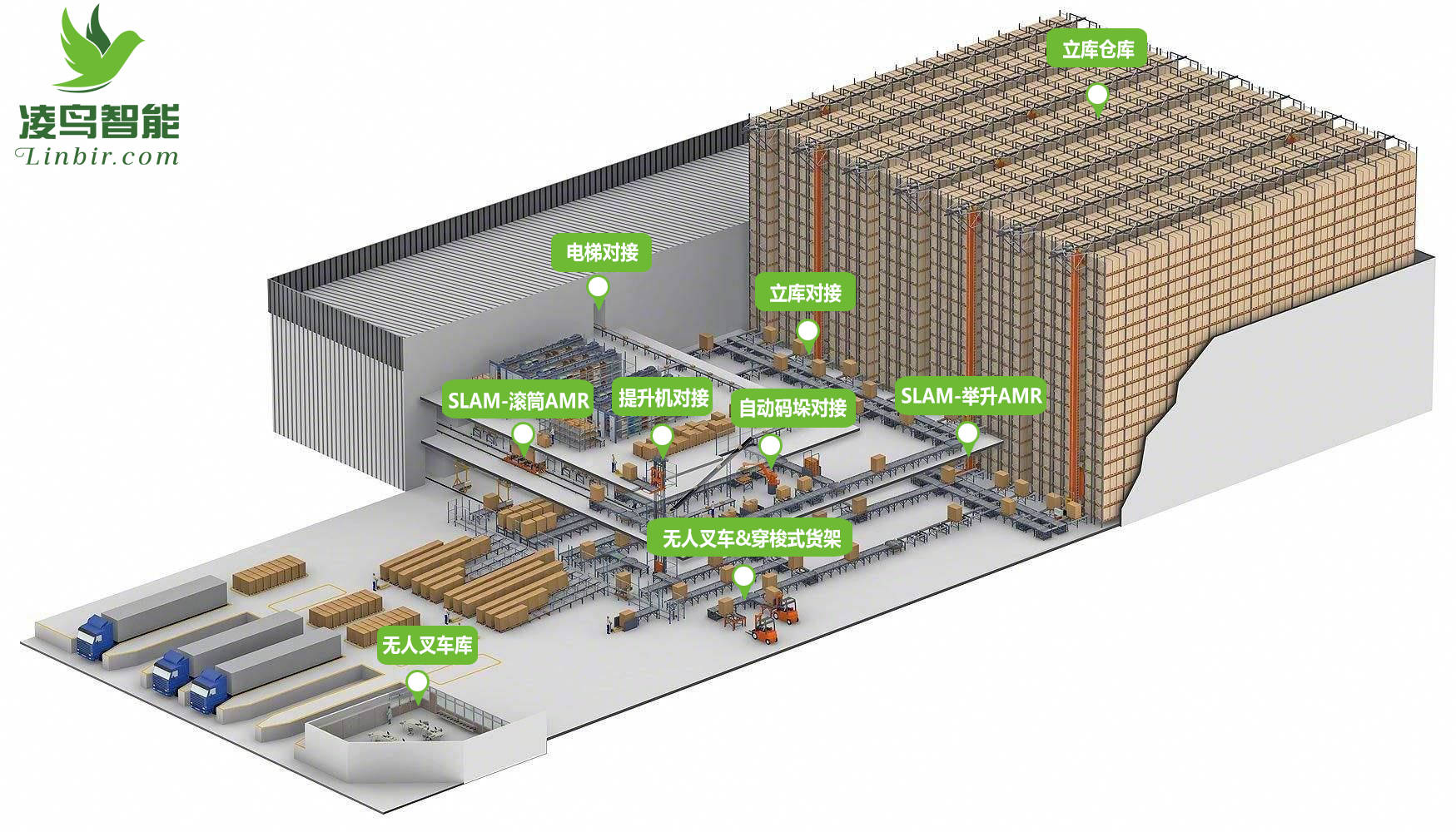
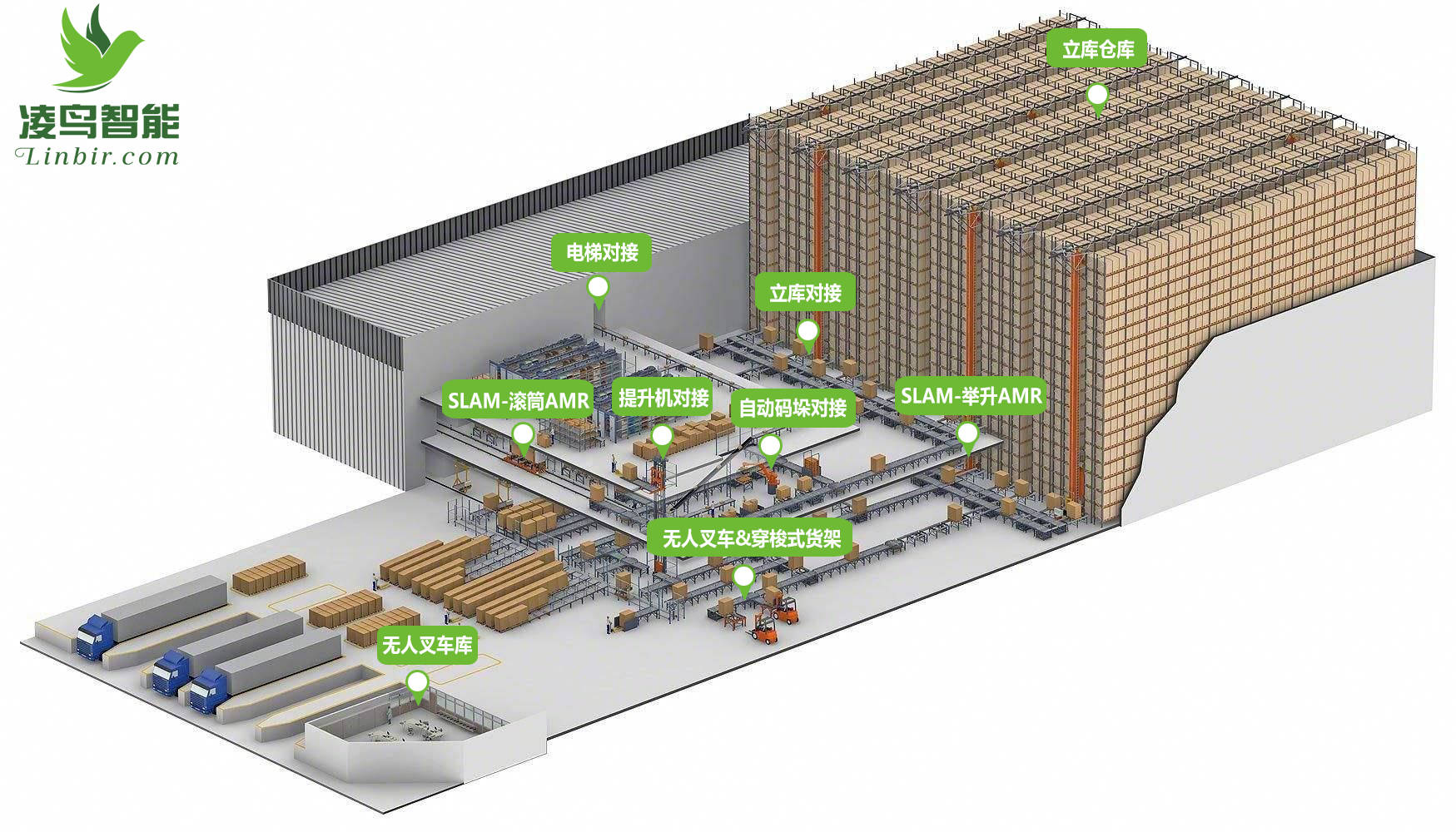
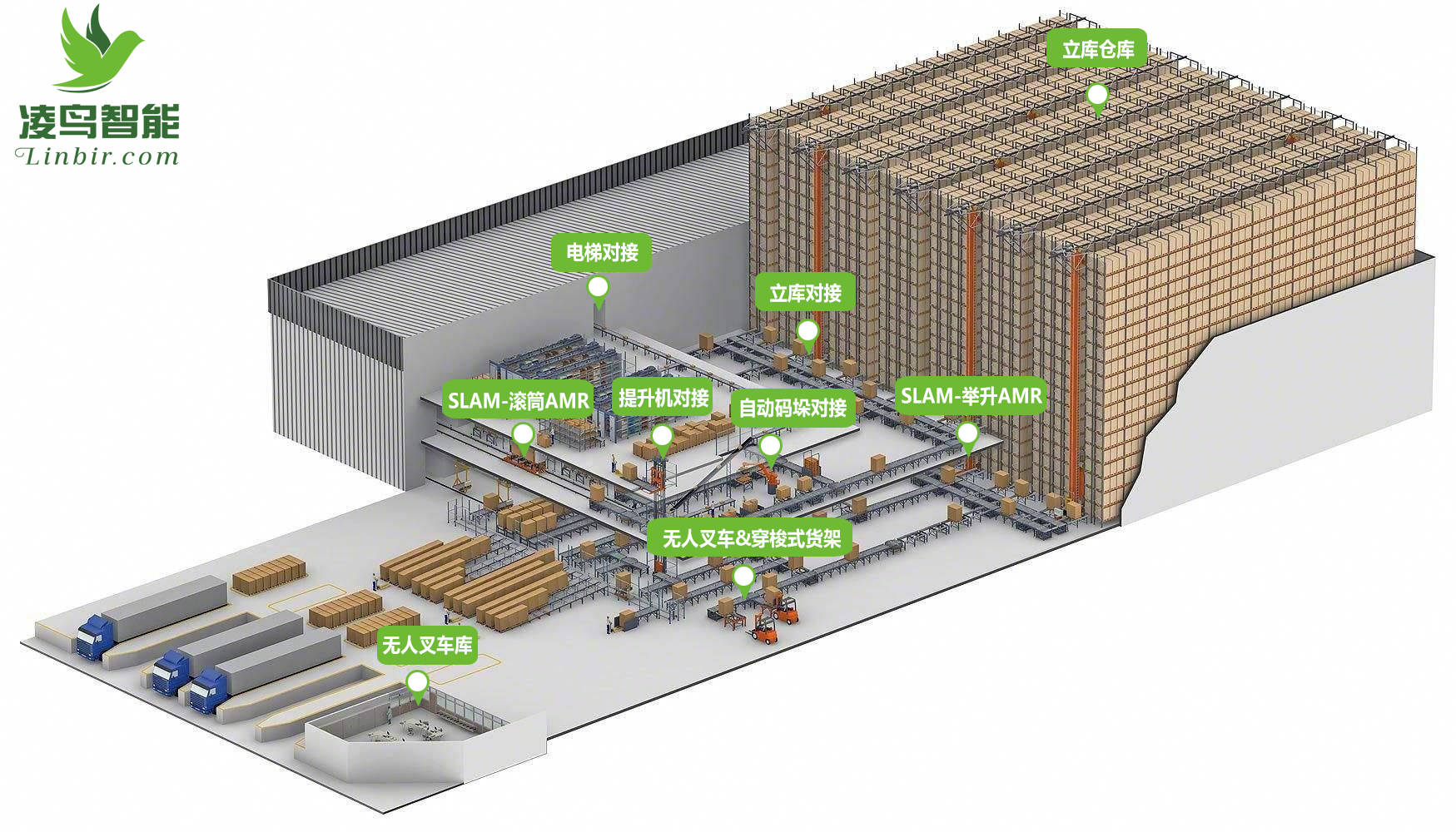
無論在流程型還是離散型的制造業中,AGV在智能生產和智能物流上都發揮了重要作用:搬運型AGV實現了物料的自動化搬運,提高了物料配送的效率和準確率;裝配型AGV代替了傳統剛性產線,實現了柔性化、定制化生產;倉儲型AGV實現了庫內貨物的自動化管理和調度,提升了倉庫的使用和周轉效率;復合型AGV與機器人協作實現了自動化生產線的搭建和優化;巡檢型AGV搭載傳感器和攝像頭等,實現了對生產現場及過程監測……
總之,AGV在智能制造中的應用非常廣泛,可以實現生產過程的自動化、智能化和高效化,在提高生產效率和質量的同時,也為制造企業帶來了巨大的經濟效益。
審核編輯 黃宇
-
機器人
+關注
關注
211文章
28641瀏覽量
208412 -
AGV
+關注
關注
27文章
1331瀏覽量
41257 -
AGV小車
+關注
關注
4文章
173瀏覽量
11197
發布評論請先 登錄
相關推薦

智能倉庫風險管控:AGV叉車與行人協同作業指南

AGV激光導航定位技術與構建地圖

智能呼叫、激光導航、自動避障,為什么AGV機器人被需要?

告別人工搬運,AGV倉儲物流已起飛!
AGV搬運機器人的“雙腿”——AGV系統
解讀 AGV 關鍵連接對物流自動化發展的意義


Agv無人叉車常見的5種導航方式大盤點!優缺點分析 哪種更適合你?
AGV選型要點及步驟,保證企業選擇的AGV小車更實用

AGV導航精度怎么更準確?利用3D相機打造更智能的AGV輔助系統
高性能纖維應變傳感器,實現可穿戴設備的柔性化、舒適化、便攜化







 工商網監
工商網監
評論