 康謀分享 | aiSim5 物理相機傳感器模型驗證方法(一)
康謀分享 | aiSim5 物理相機傳感器模型驗證方法(一)
摘要:
aiSim5可以實時模擬復雜的傳感器配置,在多GPU分布式渲支持的支持下,aiSim可以渲染20多個攝像頭、10多個雷達和10多個激光雷達在同一環境下運行。aiSim5獨有的實時渲染引擎能夠滿足對物理精確環境和天氣模擬的所有要求,具有完全的決定性和可重復性。
 圖1:aiSim 重建場景
圖1:aiSim 重建場景 圖2:真實場景
圖2:真實場景aiSim5基于物理的相機模型將會通過以下方法驗證其與真實世界的相關性:
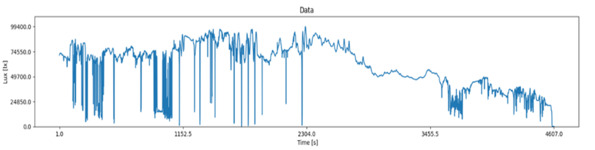
一、光照度測試
aiSim 擁有內置的光照度傳感器,因此可以使用光照度傳感器對aiSim的照明模型和材質進行端到端的驗證。
1、案例1
在 aiSim 中重新模擬一個高速公路場景,并匹配相應的天氣效果。
 ?圖3
?圖3目前正在 aiSim 中重建這一場景并測試這一光照度測量結果。
2、案例2
驗證人工照明模型以及aiSim車庫地圖的相關性時,可以在車庫使用匹配的光照屬性進行重新模擬,aiSim 中會產生相似的結果。
 ?圖4:真實世界中進行傳感器標定的場景
?圖4:真實世界中進行傳感器標定的場景 圖5:aiSim中搭建的用于相機標定車庫場景
圖5:aiSim中搭建的用于相機標定車庫場景二、色彩校準測試
1、簡介
在進行相機圖像匹配時,使用Color Correction Matrix (CCM) 是一種有效的方法,可以通過對已知相機拍攝的參考照片和aiSim渲染的Macbeth色板圖表進行比較來計算CCM。
 圖6
圖6 圖7
圖72、具體步驟
- 準備參考照片:首先,需要一張使用已知相機拍攝的Macbeth色板的照片。Macbeth色板是一個標準化的顏色樣本集,通常用于色彩管理和校準。
- 獲取aiSim渲染的Macbeth色板:接著,你需要在aiSim中創建一個Macbeth色板的渲染圖。確保渲染環境的光照條件與參考照片盡可能一致,以便更準確地匹配顏色。
- 應用CCM:計算出CCM后,aiSim可以將其應用于aiSim的圖像輸出,進行顏色校正。
- 驗證和調整:應用CCM后,比較aiSim輸出的顏色與參考照片的顏色。如果存在差異,可能需要進一步調整CCM的參數或重新計算,直到達到滿意的匹配效果。
通過這種方法,可以確保aiSim的輸出顏色與實際拍攝的照片顏色盡可能一致,從而提高圖像的真實性和準確性。
三、離線仿真器驗證
1、簡介
也可以采用基于物理的渲染(PBR)離線渲染器進行比較。
2、具體步驟
- 構建相同樣本場景:在aiSim和參考渲染器中構建相同的樣本場景。這包括場景中的所有物體、材質、光照條件等,以確保兩個環境中的變量盡可能一致。
- 使用相同的相機參數:使用相同的相機外部參數(extrinsic)和內部參數(intrinsic)來拍攝場景。外部參數涉及相機在世界空間中的位置和方向,而內部參數則包括焦距、畸變等相機特有的屬性。
- 進行HDR或LDR驗證:無論是高動態范圍(HDR)還是低動態范圍(LDR)驗證,都可以用于比較兩個渲染器生成的圖像。選擇哪種驗證方式取決于場景的光照條件和所需的驗證精度。
- 比較生成圖像的差異:對aiSim生成的圖像和參考渲染器生成的圖像進行比較。可以通過視覺檢查或使用圖像分析工具來量化差異,如計算顏色偏差、亮度對比度等。
- 多場景驗證:通過多個不同的場景來驗證系統的不同部分,例如只驗證人工光源,或者只驗證天空和太陽的效果等。可以幫助識別和隔離特定問題,提高驗證的針對性和效率。
以上方法均適用于驗證aiSim相機傳感器模型與現實世界或高精度的離線渲染器的相關性。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2553文章
51400瀏覽量
756609 -
自動駕駛
+關注
關注
785文章
13931瀏覽量
167008 -
汽車自動駕駛
+關注
關注
0文章
11瀏覽量
3756
發布評論請先 登錄
相關推薦
光纖傳感器的信號處理方法
光纖中傳播時,其特性(如光強、相位、偏振等)會受到外部環境的影響。通過測量這些變化,可以間接地獲取被測物理量的信息。 光纖傳感器的類型 強度調制型光纖傳感器 :通過測量光強的變化來獲取信息。 相位調制型光纖
Sony偏振傳感器加持 Blackfly S工業相機突破視覺成像反光難題
Q為什么采用傳感器偏振?A:視覺系統一直都在試圖克服玻璃、塑料和金屬等反光表面產生的動態或多余光線、反射、朦朧和眩光影響。TeledyneFLIR的BlackflyS機器視覺工業相機具有Sony

康謀技術 | 毫米波雷達技術解析
自動駕駛技術飛速發展,毫米波雷達已成為自動駕駛傳感器套件的關鍵。為此,康謀為您深度解析毫米波雷達技術,從概述到工作原理,再到前沿的4D技術,全面揭示其在自動駕駛中的重要作用。快來了解,一

康謀分享 | 汽車仿真與AI的結合應用
實現高質量的虛擬傳感器輸出是自動駕駛領域的一項關鍵挑戰,然而傳統方案對廣角鏡頭的渲染和處理等方面仍存在一定的局限性。為此,康謀為您介紹

電感傳感器能夠測量哪些物理量?
電感傳感器是一種利用電感效應來檢測物理量的裝置,它將被測量轉換為線圈的自感或互感的變化來測量。電感傳感器能夠測量的物理量相當廣泛,主要包括但
康謀技術 | 自動駕駛傳感器標定技術:從單一到聯合標定
進行標定以獲取各個傳感器的安裝位置。具體來說,就是通過標定確定車身坐標系下傳感器的位置。SensorCalibration傳感器標定類型在一輛具備L2+級別智駕車上

康謀分享 | 自動駕駛聯合仿真——功能模型接口FMI(三)
功能模型接口是一個開放且獨立于工具的標準,便于實現自動駕駛仿真工具間的模型交換和聯合仿真。本文以康謀ai

溫度傳感器的常見故障及處理方法
溫度傳感器是工業和日常生活中非常重要的設備,用于測量和監控溫度。以下是一些常見的溫度傳感器故障及其處理方法: 傳感器讀數不準確 : 原因 :
康謀分享|aiSim5基于生成式AI擴大仿真測試范圍(終)
在場景重建和測試流程閉環的過程中,難免會面臨3D場景制作重建耗時長、成本高、擴展性低以及交通狀況復雜程度難以滿足等問題。康謀aiSim中NeRF和3DGS可以自動化生成3D靜態場景并添加動態實例編輯,從而縮短測試流程,擴大仿真測

康謀分享 | aiSim5仿真場景重建感知置信度評估(三)
aiSim5能重建高精度的賽道、車庫、高速公路等真實交通場景,用于測試和訓練ADAS/AD系統。通過全局行動日志,能將駕駛數據轉化為場景重建,車道線檢測算法和多目標檢測算法在仿真與現實世界的相關性測試中誤差極為相近。

康謀分享|aiSim5激光雷達LiDAR模型驗證方法(二)
aiSim中的LiDAR是一種基于光線追蹤的傳感器,能夠模擬真實LiDAR發射的激光束,將會生成LASv1.4標準格式的3D點云,包含了方位角、俯仰角和距離等。aiSim能夠模擬LiD

康謀技術 |深入探討:自動駕駛中的相機標定技術
算法之間,是確保傳感器數據準確性的基礎,同時也是實現傳感器融合的關鍵先決條件。在眾多傳感器中,相機以其豐富的信息獲取能力和成本效益而成為自動駕駛系統中的首選。

指紋傳感器的定義 指紋傳感器的應用
指紋傳感器的定義 指紋傳感器的應用? 指紋傳感器是一種生物識別技術,通過檢測和分析人體指紋特征來驗證用戶身份。它基于指紋獨特性和穩定性的基本





 工商網監
工商網監
評論