 伺服控制系統的結構組成和工作原理
伺服控制系統的結構組成和工作原理
一、引言
伺服控制系統,作為現代工業自動化領域的核心組成部分,其工作原理的深入理解和應用對于提高系統性能、優化生產效率具有至關重要的作用。本文旨在全面、詳細地闡述伺服控制系統的工作原理,包括其基本概念、結構組成、控制原理以及主要指標等方面,以期為相關技術人員提供參考。
二、伺服控制系統的基本概念
伺服控制系統是一種能對試驗裝置的機械運動按預定要求進行自動控制的操作系統。在很多情況下,伺服系統專指被控制量(系統的輸出量)是機械位移或位移速度、加速度的反饋控制系統,其作用是使輸出的機械位移(或轉角)準確地跟蹤輸入的位移(或轉角)。伺服系統的結構組成和其他形式的反饋控制系統沒有原則上的區別,但其在精度、穩定性、響應特性和工作頻率等方面具有更高的要求。
三、伺服控制系統的結構組成
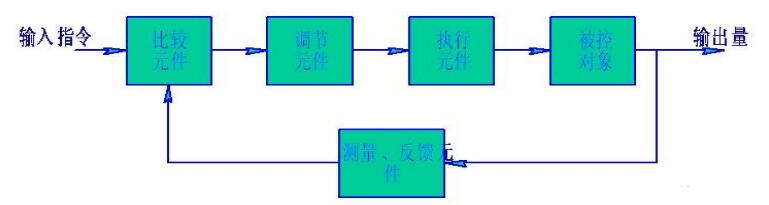
伺服控制系統一般包括控制器、被控對象、執行環節、檢測環節和比較環節等五部分。
控制器:通常是計算機或PID控制電路,其主要任務是對比較元件輸出的偏差信號進行變換處理,以控制執行元件按要求動作。控制器接收來自比較環節的偏差信號,并根據預定的控制算法(如PID算法)計算出控制信號,然后傳遞給執行環節。
被控對象:指需要控制的機械系統或設備,其參數量包括位移、速度、加速度、力和力矩等。被控對象根據控制信號進行相應的動作,以實現對機械位移或速度等的精確控制。
執行環節:其作用是按控制信號的要求,將輸入的各種形式的能量轉化成機械能,驅動被控對象工作。在伺服系統中,執行環節一般為伺服電機或液壓、氣動伺服機構等。
檢測環節:能夠對輸出進行測量并轉換成比較環節所需的信號形式。檢測環節通常包括傳感器和測量電路等,用于實時監測被控對象的實際位置、速度等參數,并將這些信息反饋給控制器。
比較環節:將輸入的指令信號與系統的反饋信號進行比較,以獲得輸出與輸入間的偏差信號的環節。比較環節通常由專門的電路或計算機來實現,其輸出的偏差信號是控制器進行信號處理的重要依據。
四、伺服控制系統的控制原理
伺服控制系統的控制原理基于閉環控制理論,通常包括以下幾個步驟:
設定目標位置:根據控制要求,設定電動機需要達到的目標位置、速度或加速度。這些設定值由控制器接收并存儲。
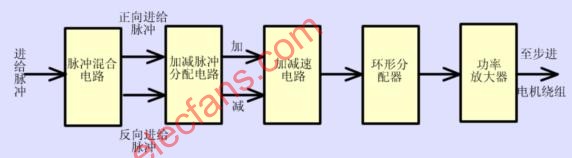
發送控制指令:控制器根據設定的目標值生成控制指令,并通過驅動器傳遞給電動機。控制指令的形式可以是模擬量信號、脈沖信號或數字信號等。
檢測實際位置:傳感器監測電動機的實際位置、速度和加速度,并將信息反饋給控制器。這些信息通常以模擬量信號或數字信號的形式傳輸。
比較與調整:控制器將反饋信號與設定值進行比較,計算出偏差,并根據偏差大小調整控制指令,以減少偏差。這個過程是一個動態的過程,控制器需要不斷地比較、計算和調整,以確保被控對象的輸出能夠準確地跟蹤輸入。
執行控制:驅動器根據調整后的控制指令驅動電動機運動,直到達到目標值。在執行過程中,控制器會不斷地接收來自檢測環節的反饋信號,并根據這些信號調整控制指令,以確保系統的穩定性和精度。
五、伺服控制系統的主要指標
衡量伺服控制系統性能的主要指標包括系統精度、穩定性、響應特性和工作頻率四大方面。
系統精度:指系統輸出量與實際輸入量之間的偏差程度。伺服系統的精度主要決定于所用的測量元件的精度,因此必須采用高精度的測量元件。此外,還可通過附加措施(如精測粗測系統或雙通道系統)來提高系統的精度。
穩定性:指系統在受到外界干擾或內部參數變化時,能否保持其輸出量穩定不變的能力。穩定性是伺服系統的重要指標之一,對于保證系統的正常運行和長期穩定性具有重要意義。
響應特性:指系統對輸入信號的響應速度和響應質量。響應特性反映了系統的動態性能,對于要求快速響應和高精度控制的場合尤為重要。
工作頻率:指系統能夠正常工作的頻率范圍。伺服系統的帶寬反映了其跟蹤的快速性,帶寬越大,快速性越好。因此,提高伺服系統的帶寬是提高其工作頻率的有效途徑之一。
六、結論
綜上所述,伺服控制系統的工作原理是基于閉環控制理論的,通過設定目標位置、發送控制指令、檢測實際位置、比較與調整以及執行控制等步驟實現對被控對象的精確控制。同時,伺服控制系統具有高精度、穩定性好、響應快等特點,廣泛應用于各種工業自動化領域。在實際應用中,需要根據具體需求和實際情況進行選擇和調整,以達到最佳的控制效果。
-
控制器
+關注
關注
112文章
16445瀏覽量
179444 -
伺服控制系統
+關注
關注
1文章
55瀏覽量
12298
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論