 如何降低輸入引起的穩態誤差
如何降低輸入引起的穩態誤差
- 引言
穩態誤差是指在給定輸入信號作用下,系統輸出與期望輸出之間的差異。在控制系統中,穩態誤差的存在會影響系統的性能和穩定性。因此,降低輸入引起的穩態誤差對于提高控制系統的性能至關重要。
- 穩態誤差的來源
穩態誤差的來源主要包括以下幾個方面:
2.1 系統本身的非線性特性
許多實際系統都存在非線性特性,這些非線性特性會導致系統在輸入信號作用下產生穩態誤差。
2.2 系統參數的不確定性
實際系統中的參數往往存在一定的不確定性,這些不確定性會導致系統在輸入信號作用下產生穩態誤差。
2.3 輸入信號的非理想性
輸入信號可能存在噪聲、干擾等非理想性因素,這些因素會導致系統在輸入信號作用下產生穩態誤差。
- 降低輸入引起的穩態誤差的方法
3.1 系統建模與辨識
準確建模和辨識系統是降低輸入引起的穩態誤差的基礎。通過建立準確的系統模型,可以更好地理解系統的動態特性和穩態特性,從而為后續的控制策略設計提供依據。
3.1.1 系統建模
系統建模是將實際系統抽象為數學模型的過程。常用的系統建模方法包括:
- 基于物理原理的建模:根據系統的物理原理,建立系統的數學模型。
- 基于實驗數據的建模:通過實驗數據,使用統計方法或機器學習方法建立系統的數學模型。
3.1.2 系統辨識
系統辨識是確定系統模型參數的過程。常用的系統辨識方法包括:
- 參數估計方法:如最小二乘法、極大似然法等。
- 非參數估計方法:如核方法、神經網絡方法等。
3.2 控制策略設計
設計合適的控制策略是降低輸入引起的穩態誤差的關鍵。常用的控制策略包括:
3.2.1 PID控制
PID控制是一種常見的控制策略,通過調整比例(P)、積分(I)和微分(D)三個參數,可以實現對系統的精確控制。
3.2.2 預測控制
預測控制是一種基于模型的控制策略,通過預測系統在未來一段時間內的行為,實現對系統的優化控制。
3.2.3 自適應控制
自適應控制是一種能夠適應系統參數變化的控制策略,通過在線調整控制器參數,實現對系統的穩定控制。
3.3 濾波器設計
濾波器設計是降低輸入信號非理想性對穩態誤差影響的有效方法。常用的濾波器包括:
3.3.1 低通濾波器
低通濾波器可以濾除輸入信號中的高頻噪聲,保留低頻成分,從而降低穩態誤差。
3.3.2 高通濾波器
高通濾波器可以濾除輸入信號中的低頻成分,保留高頻成分,適用于某些特定場景。
3.3.3 帶通濾波器
帶通濾波器可以濾除輸入信號中非目標頻率的成分,保留目標頻率成分,適用于頻域分析。
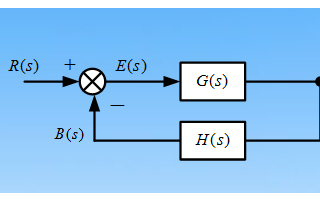
3.4 反饋校正
反饋校正是通過引入反饋環節來降低系統穩態誤差的方法。常用的反饋校正方法包括:
3.4.1 比例反饋
比例反饋是通過引入比例因子來調整系統的輸出,從而降低穩態誤差。
3.4.2 積分反饋
積分反饋是通過引入積分環節來消除系統的穩態誤差。
3.4.3 微分反饋
微分反饋是通過引入微分環節來提高系統的響應速度,從而降低穩態誤差。
- 降低輸入引起的穩態誤差的實際應用
4.1 工業過程控制
在工業過程控制中,降低輸入引起的穩態誤差對于提高生產效率和產品質量具有重要意義。通過采用先進的控制策略和濾波器設計,可以實現對工業過程的精確控制。
4.2 機器人控制
在機器人控制領域,降低輸入引起的穩態誤差對于提高機器人的定位精度和運動性能具有重要意義。通過采用自適應控制和預測控制等方法,可以實現對機器人的精確控制。
4.3 航空航天控制
在航空航天領域,降低輸入引起的穩態誤差對于提高飛行器的飛行性能和安全性具有重要意義。通過采用先進的控制策略和反饋校正方法,可以實現對飛行器的穩定控制。
- 結論
降低輸入引起的穩態誤差是提高控制系統性能的重要途徑。通過系統建模與辨識、控制策略設計、濾波器設計和反饋校正等方法,可以有效地降低輸入引起的穩態誤差。在實際應用中,應根據具體場景選擇合適的方法,以實現對系統的精確控制。
-
控制系統
+關注
關注
41文章
6659瀏覽量
110889 -
模型
+關注
關注
1文章
3313瀏覽量
49226 -
輸入信號
+關注
關注
0文章
469瀏覽量
12608 -
穩態誤差
+關注
關注
0文章
8瀏覽量
2123
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論