 評估MEMS陀螺儀信號中常見噪聲源的簡單流程
評估MEMS陀螺儀信號中常見噪聲源的簡單流程

當MEMS慣性測量單元(IMU)用作
你,必須了解陀螺儀的噪聲情況,
因為,它會在所監視的平臺上造成
不必要的物理運動。
根據具體情況,針對特定MEMS IMU進行早期應用目標噪聲估算時需要考慮多個潛在的誤差源。在此過程中需要考慮的三個常見陀螺儀特性——其固有噪聲、線性振動響應和對準誤差。
圖 1的簡單模型顯示了會影響各誤差源評估的幾個特性:噪聲源、傳感器響應和濾波。此模型給出了對這些特性進行頻譜分析所需的基準。

圖1.陀螺儀噪聲源和信號鏈
傳感器固有噪聲
傳感器固有噪聲代表的是陀螺儀在靜態慣性和環境條件下運行時其輸出中的隨機振動。MEMS IMU數據手冊通常會提供速率噪聲密度(RND)參數來描述陀螺儀相對于頻率的固有噪聲。此參數通常使用單位°/s/√Hz,是預測特定濾波器配置固有噪聲的關鍵。這里的公式給出了一種簡單方法來估算與特定頻率響應(噪聲帶寬)和RND相關的噪聲。
 |
當RND的頻率響應遵循單極點或雙極點低通濾波器曲線時,噪聲帶寬(fNBW)和濾波器截止頻率(fC)將有如下的關系。
|
|


除了RND參數外,MEMS IMU數據手冊有時會使用輸出噪聲等參數指定特定濾波器配置的陀螺儀固有噪聲。輸出噪聲通常使用角速率標準單位(°/s),并使用均方根(rms)等統計術語來描述總噪聲幅度。
線性振動
由于陀螺儀用于測量旋轉角速率,因此其對線性運動的響應會引入測量誤差。MEMS IMU數據手冊通常通過“線性加速度對偏置的影響”或“線性加速度”等參數來描述對線性運動的這一響應,這些參數通常使用單位°/s/g。線性振動是一種重復的慣性運動,其幅度大小可通過位移(m)、線性速度(m/s)或線性加 速度(m/s2或g)表示。在特定的振動頻率(fLV)下,位移(|dLV|)、速度(|vLV|)和加速度(|aLV|)之間的幅度關系如公式4所示。
 |
當振動幅度以加速度(grms)表示時,與線性加速度參數相乘可估算陀螺儀測量中產生的噪聲。例如,當ADIS16488A承受5g(rms)的振動時,由于線性加速度等于0.009°/s/g,因此其陀螺儀中的 噪聲估算值將為0.045°/s (rms)。
 |
如圖1所示,陀螺儀信號鏈常常包括濾波器,這有助于減少線性振動引起的噪聲。以頻譜項(幅度、頻率)定義振動可在估算噪聲貢獻時考慮濾波器的影響。加速度頻譜密度(ASD)函數是以頻譜項表達振動的常見方式,通常使用單位g2/Hz。下面通過示例說明已知ASD和陀螺儀頻率響應(HG)時估算噪聲幅度的步驟:
1
ASD函數乘以陀螺儀頻率響應的平方值;
 |
2
利用帕塞瓦爾定理,通過在目標頻率范圍內對ASDF進行積分來計算“濾波振動曲線”中的平均功率;
 |
3
求取噪聲功率估算值的平方根,然后與線性加速度系數(HLG)相乘即可計算出陀螺儀噪聲幅度。
 |
運動控制系統通常會建立慣性參考系,其中包含三個相互垂直90°的軸。這三個軸為MEMS IMU中的各個傳感器提供方位參考。理想情況下,陀螺儀的各個旋轉軸將與系統參考系中的軸完全對齊,將IMU安裝到平臺上之后,其將監視運行情況。這種情況下,在慣性參考系中圍繞其中一個軸旋轉,只有該軸的陀螺 儀會生成響應。實際操作中,無法實現這種效果,因為機械缺陷必定會造成一些對齊誤差,從而導致離軸陀螺儀響應慣性參考系中圍繞一個軸的旋轉運動。量化此響應需要一些三角恒等式,并謹慎定義陀螺儀的對齊誤差。
每個陀螺儀的對齊誤差均具有兩個分量,分別定義其相對于慣性參考系中另一個軸的對齊誤差。例如,對于圖2中的系統,θXZ代表x軸陀螺儀相對于z軸的對齊誤差。此對齊誤差定義有助于建立公式以計算離軸陀螺儀對系統慣性參考系中圍繞另一個軸旋轉運動的響應。公式中給出了一個示例,其量化了x 軸陀螺儀相對于z軸的對齊誤差(θXZ)和圍繞z軸旋轉(ωZR)而產生的響應(ωGX)。
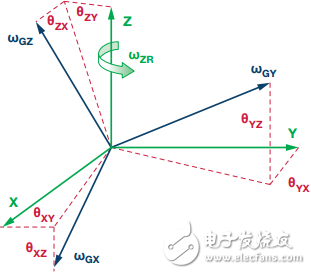
圖2.三軸式陀螺儀對齊誤差

MEMS IMU通常具有兩種類型的對齊誤差,它們相互關聯,但在系統級建模中具有不同應用——軸到封裝和軸到軸:
-
“軸到封裝對齊誤差”描述陀螺儀相對于器件封裝上特定機械特性的對齊情況。將IMU安裝到系統后,如果系統無法支持慣性對齊,則軸到封裝對齊誤差將成為整體對齊誤差的主要因素之一。系統與 IMU的機械接口的機械缺陷也會增加整體對齊誤差;
-
“軸到軸對齊誤差”描述各個陀螺儀旋轉軸相對于其他兩個陀螺儀的相對對齊精度。在系統可以實現簡單的對齊過程時,此參數影響最大,此時通常沿系統的慣性參考系中的一個軸直線移動整個組件(IMU已安裝在系統平臺上),同時需要觀察傳感器。
如果對齊誤差不是IMU規格的一部分,則通過評估器件封裝中主要機械特性的物理容差就可以估算這些誤差。例如,以下情況會引入0.5°的對齊誤差:
-
4 mm × 4 mm LGA封裝上的焊接回流工藝具有35 μm的安裝誤差;
-
PCB上相距20 mm的兩個安裝孔之間具有0.175 mm的容差。
案例研究
為了說明這些原理,請看以下示例,其中估算ADIS16488A中的陀螺儀噪聲,該器件用于在以下配置/條件下運行的新型航電系統:
-
陀螺儀可用全帶寬
-
振動(ASD(f)):0.122g2/Hz;10 Hz到2000 Hz (總振動= 5grms)
-
最大旋轉速率 = ±100°/s,頻率范圍 = 5 Hz到50 Hz
全帶寬配置匹配與ADIS16488A針對固有傳感器噪聲的0.135°/s(rms)的輸出噪聲規格相關的條件。對于振動貢獻,圖3給出了曲線說明ASD(f)以及濾波曲線ASDF(f)。ASDF(f)中的頻率響應反映了與此IMU陀螺儀信號路徑中雙極點(404 Hz,757 Hz)低通濾波器相關的衰減曲線。

圖3.振動頻譜分析
利用公式通過線性加速度參數乘以ASDF (f)曲線幅值2.24grms,可估算產生的噪聲電平為0.02°/s (rms)。此噪聲電平比通過公式5到的0.045°/s (rms)低55%,利用公式的方法未采用頻譜項評估此噪聲源。這種改善是采用頻譜項定義振動曲線以獲取值的一個示例。
 |
通過如下公式可計算50 Hz頻率下圍繞z軸進行±100°/s旋轉振蕩時的x軸陀螺儀噪聲。由于50 Hz恰好位于雙極點濾波器的通帶中,因此濾波器無法抑制此噪聲源。此計算假設ADIS16488A的軸到軸對齊誤差是主要誤差源(也就是說,將IMU安裝到系統后,全面部署時將包括簡單的慣性參考系對齊過程)。
 |
表1總結了ADIS16488A中來自各個因素的陀螺儀噪聲。公式12給出了0.15°/s (rms)的整體噪聲估算值(ωNOISE),表示表1中所有三個噪聲源的平方和根值(RSS)。
|
表1.噪聲貢獻總結
|


上述這些方法利用相應數據手冊中的常用參數信息以及對慣性條件的初步見解或估算,給出了評估MEMS陀螺儀信號中常見噪聲源的簡單流程。了解和評估這些噪聲源有助于您確定重要的應用信息,指導IMU選擇流程,還可以發掘改善機會(簡單對齊,當IMU支持相應的軸到軸對齊誤差級別時)以使用更經濟的解決方案,反之則無法實現這種優勢。
-
mems
+關注
關注
129文章
3958瀏覽量
191102 -
陀螺儀
+關注
關注
44文章
792瀏覽量
98979
原文標題:ADI深度丨突破開關電源噪聲大的魔咒,最強“魔法”在此
文章出處:【微信號:analog_devices,微信公眾號:analog_devices】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
三軸MEMS陀螺儀:創新科技,精準感知
愛普生X2A0002710002 XV7011BB陀螺儀傳感器用于高精設備行業

優可測白光干涉儀:激光陀螺儀提升良率與精度的關鍵
愛普生(EPSON)陀螺儀傳感器的特點和應用領域介紹
愛普生開發出全新X2A0002710002 XV7011BB陀螺儀傳感器用于高精設備行業

XV7011BB陀螺儀傳感器廣泛用于工業應用
MEMS陀螺儀工作原理及性能提升方法的綜述

陀螺儀傳感器-它們是如何工作的,未來會發生什么
基于聚焦叉指換能器的環形SAW陀螺儀制造工藝及測量方案
陀螺儀x軸和y軸的應用
EPSON X2A0002710002 XV7011BB陀螺儀傳感器的特征和用途
EPSON的GGPM6083STD陀螺儀傳感器(壓電俠)
一文探秘MEMS陀螺儀工作原理與特性







 工商網監
工商網監
評論