") 智能駕駛與傳統(tǒng)駕駛的區(qū)別
智能駕駛與傳統(tǒng)駕駛的區(qū)別
智能駕駛與傳統(tǒng)駕駛在多個方面存在顯著差異。以下是對兩者區(qū)別的分析:
一、駕駛方式與操控性
- 智能駕駛 :
- 傳統(tǒng)駕駛 :
- 依賴人類駕駛員進(jìn)行操控,駕駛員需要時刻注意交通規(guī)則、道路信號和其他駕駛員行為。
- 通過手動操作方向盤、油門和剎車等來控制車輛行駛,駕駛過程需要駕駛員的高度專注和反應(yīng)速度。
二、安全性與事故預(yù)防
- 智能駕駛 :
- 能夠?qū)崟r監(jiān)測和識別道路上的障礙物、行人和其他車輛,并做出相應(yīng)的反應(yīng),大大降低了人為駕駛錯誤和交通事故的風(fēng)險。
- 可以在危險情況下主動采取措施,如自動剎車、緊急避讓等,提高行車的安全性。
- 傳統(tǒng)駕駛 :
- 人為因素如疲勞駕駛、酒駕、分心駕駛等是導(dǎo)致交通事故的重要原因。
- 駕駛員的判斷能力和反應(yīng)速度也受到個人經(jīng)驗和技能水平的限制,增加了事故發(fā)生的可能性。
三、環(huán)保性與能效
- 智能駕駛 :
- 許多智能駕駛汽車采用電力驅(qū)動系統(tǒng),減少了對傳統(tǒng)燃油的依賴,從而降低了尾氣排放和碳排放量。
- 能夠通過智能化路徑規(guī)劃和交通管制系統(tǒng)的配合,優(yōu)化車輛行駛路線,減少擁堵和能源消耗。
- 傳統(tǒng)駕駛 :
- 主要依賴內(nèi)燃機(jī)驅(qū)動,使用石油作為燃料,排放大量二氧化碳等有害氣體,對環(huán)境造成污染。
- 由于交通擁堵和駕駛不當(dāng)?shù)仍颍部赡軐?dǎo)致燃油消耗的增加和運營成本的上升。
四、駕駛體驗與效率
- 智能駕駛 :
- 提高了駕駛效率和用戶體驗,無需人工駕駛的情況下,駕駛者可以專注于其他任務(wù)。
- 可以根據(jù)實時交通情況選擇最佳行駛路線,減少交通堵塞和擁堵。
- 傳統(tǒng)駕駛 :
- 駕駛過程中需要駕駛員的高度專注和反應(yīng)速度,駕駛員需要承擔(dān)較大的精神壓力。
- 在交通擁堵或復(fù)雜路況下,駕駛體驗可能會受到影響。
五、技術(shù)集成與發(fā)展趨勢
- 智能駕駛 :
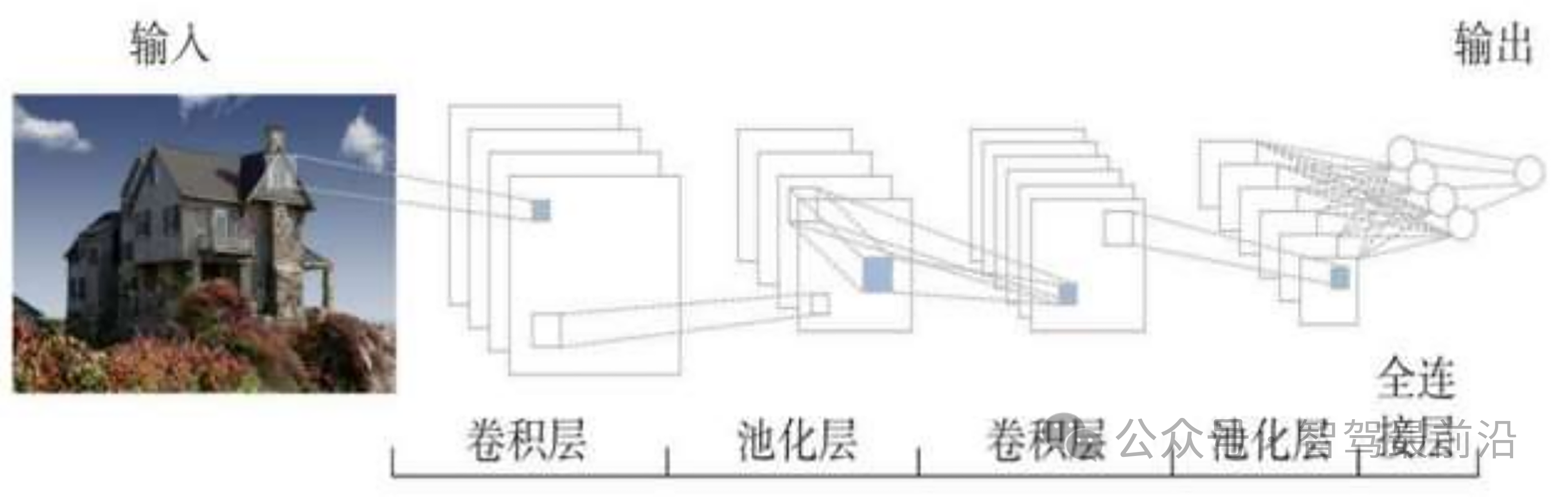
- 集成了多種先進(jìn)技術(shù),如人工智能、視覺計算、雷達(dá)、監(jiān)控裝置和全球定位系統(tǒng)等。
- 這些技術(shù)的不斷發(fā)展和創(chuàng)新為智能駕駛的發(fā)展提供了強(qiáng)大的支持,未來有望實現(xiàn)更高級別的自動駕駛。
- 傳統(tǒng)駕駛 :
- 雖然也采用了許多先進(jìn)技術(shù),如發(fā)動機(jī)技術(shù)、底盤技術(shù)等。
- 但相對于智能駕駛來說,其技術(shù)水平和技術(shù)含量較低,缺乏智能化和自主化的能力。
綜上所述,智能駕駛與傳統(tǒng)駕駛在駕駛方式、安全性、環(huán)保性、駕駛體驗以及技術(shù)集成等多個方面都存在顯著差異。隨著科技的不斷發(fā)展和進(jìn)步,智能駕駛將在未來交通出行領(lǐng)域發(fā)揮越來越重要的作用。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
傳感器
+關(guān)注
關(guān)注
2553文章
51390瀏覽量
756566 -
攝像頭
+關(guān)注
關(guān)注
60文章
4862瀏覽量
96299 -
人工智能
+關(guān)注
關(guān)注
1796文章
47666瀏覽量
240272 -
智能駕駛
+關(guān)注
關(guān)注
3文章
2589瀏覽量
48919
發(fā)布評論請先 登錄
相關(guān)推薦

MXsteerWheel與DYNA4的強(qiáng)強(qiáng)聯(lián)手#ADAS #智能駕駛 #線控轉(zhuǎn)向
智能駕駛
北匯信息POLELINK
發(fā)布于 :2024年11月19日 18:49:07
從特斯拉看智能駕駛未來發(fā)展
編者語:「智駕最前沿」微信公眾號后臺回復(fù):C-0587,獲取本文參考報告:《從特斯拉視角,看智能駕駛研究框架》pdf下載方式。 隨著自動駕駛技術(shù)的快速發(fā)展,智能
智能駕駛在共享出行中的作用
智能駕駛在共享出行中發(fā)揮著至關(guān)重要的作用,它不僅改變了傳統(tǒng)的出行方式,還提高了出行效率、安全性和用戶體驗。以下是對智能駕駛在共享出行中作用的
智能駕駛用戶體驗優(yōu)化建議
針對智能駕駛用戶體驗的優(yōu)化,可以從以下幾個方面提出具體建議: 一、提升系統(tǒng)性能與穩(wěn)定性 優(yōu)化路線識別算法 : 針對智能駕駛輔助系統(tǒng)(如NCA)在高架橋上行駛時出現(xiàn)的無端減速現(xiàn)象,應(yīng)優(yōu)化
智能駕駛與自動駕駛的關(guān)系
智能駕駛與自動駕駛在概念上存在一定的聯(lián)系和區(qū)別,以下是對兩者關(guān)系的介紹: 一、概念定義 智能駕駛
智能駕駛對交通安全的影響
智能駕駛對交通安全的影響是顯著且深遠(yuǎn)的,主要體現(xiàn)在以下幾個方面: 一、提高行車安全性 智能駕駛技術(shù)通過集成先進(jìn)的傳感器、高精度地圖、人工智能
如何選擇智能駕駛輔助系統(tǒng)
在選擇智能駕駛輔助系統(tǒng)時,消費者需要考慮多個因素以確保所選系統(tǒng)能夠滿足自己的需求并提供安全、可靠的駕駛體驗。以下是一些關(guān)鍵的選擇要素: 一、系統(tǒng)穩(wěn)定性與可靠性 穩(wěn)定性 :確保智能
智能駕駛和自動駕駛區(qū)別是什么
智能駕駛與自動駕駛,這兩個概念在近年來隨著科技的飛速發(fā)展而逐漸進(jìn)入公眾視野,成為汽車行業(yè)乃至整個交通領(lǐng)域的熱門話題。盡管兩者在名稱上相似,但實際上它們之間存在著顯著的差異。 一、技術(shù)原理 智能
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA(Field-Programmable Gate Array,現(xiàn)場可編程門陣列)在自動駕駛領(lǐng)域具有顯著的優(yōu)勢,這些優(yōu)勢使得FPGA成為自動駕駛技術(shù)中不可或缺的一部分。以下是FPGA在自動駕駛
發(fā)表于 07-29 17:11
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
FPGA(Field-Programmable Gate Array,現(xiàn)場可編程門陣列)在自動駕駛領(lǐng)域具有廣泛的應(yīng)用,其高性能、可配置性、低功耗和低延遲等特點為自動駕駛的實現(xiàn)提供了強(qiáng)有力的支持。以下
發(fā)表于 07-29 17:09
華為智能駕駛:領(lǐng)跑全球的智能駕駛新紀(jì)元
在智能駕駛的浪潮中,許多科技巨頭曾試圖在這片藍(lán)海中探尋新的增長點。然而,谷歌、蘋果、三星等科技巨頭紛紛宣布放棄自動駕駛系統(tǒng)的研發(fā),原因是他們發(fā)現(xiàn)這一領(lǐng)域競爭激烈,投入巨大且市場應(yīng)用前景不明朗。然而
智能駕駛基本概念定義 中國智能駕駛格局分析
在行車領(lǐng)域,產(chǎn)品迭代路線包括低級輔助駕駛到高級駕駛輔助,涵蓋了諸如LKA、AEB、ACC、LCC、ALC、HWA等功能。城市NOA和高速NOA則實現(xiàn)了在城市和高速場景下的智能駕駛。
發(fā)表于 04-12 11:36
?1357次閱讀

未來已來,多傳感器融合感知是自動駕駛破局的關(guān)鍵
/L4級自動駕駛賽跑的元年。
馬斯克評論FSD 12.3版本的左轉(zhuǎn)彎操作就像人類司機(jī)一樣。如果FSD 12.3版本成功,將基本顛覆目前市場上的智能駕駛技術(shù)路線。基于“數(shù)據(jù)/算法/算力”的無人駕
發(fā)表于 04-11 10:26





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論