") 英偉達推出基石世界模型Cosmos,解決智駕與機器人具身智能訓(xùn)練數(shù)據(jù)問題
英偉達推出基石世界模型Cosmos,解決智駕與機器人具身智能訓(xùn)練數(shù)據(jù)問題
CES 2025展會上,英偉達推出了基石世界模型Cosmos,World Foundation Model基石世界模型,簡稱WFM。
物理 AI 模型的開發(fā)成本很高并且需要大量真實數(shù)據(jù)和測試。Cosmos 世界基礎(chǔ)模型(WFM)使開發(fā)者能夠輕松生成大量基于物理學(xué)的逼真合成數(shù)據(jù),以用于訓(xùn)練和評估其現(xiàn)有的模型。開發(fā)者還可以通過微調(diào) Cosmos WFM 構(gòu)建自定義模型。
為加速機器人和自動駕駛汽車行業(yè)的工作,Cosmos 模型將以開放模型許可證的方式提供。開發(fā)者可以在 NVIDIA API 目錄中預(yù)覽首批模型,也可以從 NVIDIA NGC 目錄或 Hugging Face下載整個系列的模型和微調(diào)框架。
Cosmos 的首批用戶包括 1X、Agile Robots、Agility、Figure AI、Foretellix、Fourier、Galbot、Hillbot、IntBot、Neura Robotics、Skild AI、Virtual Incision、Waabi 和小鵬汽車等領(lǐng)先機器人和汽車公司以及共享出行巨頭 Uber。
Cosmos主要功能,生成虛擬世界狀態(tài):Cosmos能根據(jù)文本、圖像或視頻的提示生成高度仿真的虛擬世界狀態(tài),適用于自動駕駛和機器人應(yīng)用。
生成式模型:平臺基于生成式模型快速生成與真實世界場景相似的數(shù)據(jù),幫助開發(fā)者訓(xùn)練和評估現(xiàn)有的AI模型。
高級標(biāo)記器和數(shù)據(jù)處理:Cosmos集成了高級標(biāo)記器和加速視頻處理管道,生成的數(shù)據(jù)在后續(xù)的模型訓(xùn)練中發(fā)揮更大的作用。
安全與合規(guī):平臺還提供了安全防護機制,確保數(shù)據(jù)的安全與合規(guī)。
開放模型許可:Cosmos將以開放模型許可的形式在Hugging Face和NVIDIA NGC目錄中提供,支持開發(fā)者進行定制化應(yīng)用。
Cosmos的技術(shù)原理
生成式世界基礎(chǔ)模型(WFM):Cosmos使用先進的生成式模型技術(shù),模型包括擴散模型和自回歸Transformer模型,能生成與真實世界高度一致的場景。
駕駛環(huán)境模擬:Cosmos能生成各種天氣和路況條件下的合成數(shù)據(jù),為自動駕駛系統(tǒng)的訓(xùn)練提供豐富的場景。
策略模型優(yōu)化:通過生成大量逼真的駕駛場景,Cosmos可以幫助自動駕駛系統(tǒng)在模擬環(huán)境中進行強化學(xué)習(xí),優(yōu)化決策策略模型,測試在不同場景下的性能。
復(fù)雜環(huán)境適應(yīng)性訓(xùn)練:Cosmos可以為機器人提供復(fù)雜環(huán)境的實時模擬,使其感知系統(tǒng)通過合成數(shù)據(jù)進行訓(xùn)練。
導(dǎo)航與任務(wù)執(zhí)行:基于Cosmos生成的虛擬世界狀態(tài),機器人可以更好地理解和適應(yīng)周圍環(huán)境,實現(xiàn)更精準(zhǔn)的導(dǎo)航和任務(wù)執(zhí)行。
逼真場景生成:Cosmos能生成高度仿真的虛擬世界狀態(tài),適用于虛擬現(xiàn)實游戲和仿真訓(xùn)練。例如,開發(fā)者可以使用Omniverse創(chuàng)建三維場景,然后通過Cosmos將其轉(zhuǎn)換為逼真的場景,使機器人在模擬環(huán)境中進行訓(xùn)練。
工業(yè)數(shù)字孿生:結(jié)合NVIDIA的Omniverse和Cosmos,可以創(chuàng)建工業(yè)數(shù)字孿生環(huán)境,用于工廠和倉庫的模擬、測試和優(yōu)化。這使得在復(fù)雜生產(chǎn)設(shè)施和配送中心網(wǎng)絡(luò)中,能更好地進行手動設(shè)計、操作和優(yōu)化。
Cosmos的應(yīng)用案例
Uber自動駕駛開發(fā):Uber作為首批采用Cosmos的公司之一,基于生成式AI能力,加速了安全、可擴展的自動駕駛解決方案的進程。為Uber的自動駕駛系統(tǒng)提供了豐富的合成數(shù)據(jù),幫助其在不同駕駛場景下進行模型訓(xùn)練和優(yōu)化,提升自動駕駛技術(shù)的安全性和可靠性。
小鵬汽車模擬訓(xùn)練:小鵬汽車也采用了Cosmos平臺,通過生成各種天氣和路況條件下的合成駕駛數(shù)據(jù),對自動駕駛算法進行模擬訓(xùn)練。例如,在模擬雨、雪、霧、霾等惡劣天氣下,以及城市道路、高速公路等不同路況的場景中,自動駕駛系統(tǒng)可以學(xué)習(xí)如何更好地感知環(huán)境、做出決策和執(zhí)行操作,提高算法在真實街景中的表現(xiàn)。
1X機器人動態(tài)規(guī)劃:1X公司用Cosmos的仿真引擎,為機器人提供了高保真的力學(xué)、運動學(xué)和動態(tài)交互建模能力。通過閉環(huán)模擬,1X機器人可以在虛擬環(huán)境中進行動態(tài)規(guī)劃與環(huán)境適應(yīng)性優(yōu)化,在實際應(yīng)用場景中實現(xiàn)更精準(zhǔn)的導(dǎo)航和任務(wù)執(zhí)行。
Waabi是一家從自動駕駛汽車開始致力于開發(fā)物理世界生成式 AI 的先驅(qū)。該公司正在評估 Cosmos 在自動駕駛汽車軟件開發(fā)和仿真中數(shù)據(jù)整理的應(yīng)用。
Wayve是一家致力于開發(fā)自動駕駛 AI 基礎(chǔ)模型的公司。該公司正在評估使用 Cosmos 搜索用于提高安全性和驗證的極端駕駛場景。
自動駕駛汽車工具鏈提供商Foretellix將使用 Cosmos 與 NVIDIA Omniverse Sensor RTX API大規(guī)模評估和生成高保真測試場景與訓(xùn)練數(shù)據(jù)。
我們來具體看一下Cosmos,英偉達搜集了2000萬小時的視頻,這些視頻數(shù)據(jù)篩選或者說編審(curation)管線借助許多經(jīng)過預(yù)訓(xùn)練的圖像/視頻理解模型,從中抽出1億個2-60秒的片段,每個片段使用VLM視覺語言模型,每256幀提供一個視覺解說(caption),英偉達采用自回歸即transformer和擴散diffusion兩種模式來生成盡可能多的可用于訓(xùn)練的視頻。英偉達使用一萬張H100顯卡,用時三個月,訓(xùn)練出了Cosmos,當(dāng)然這個模型會一直升級,英偉達的運算資源自然是不成問題的。
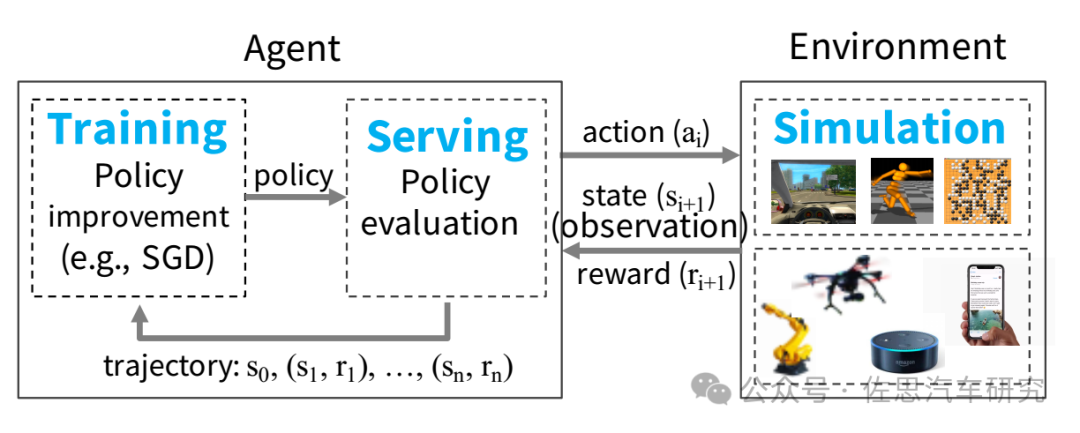
英偉達打造了一種Ray-based orchestration的管線,用于端到端特別是強化學(xué)習(xí)訓(xùn)練中。
強化學(xué)習(xí)訓(xùn)練
圖片來源:論文《Ray: A Distributed Framework for Emerging AI Applications》
Ray架構(gòu)
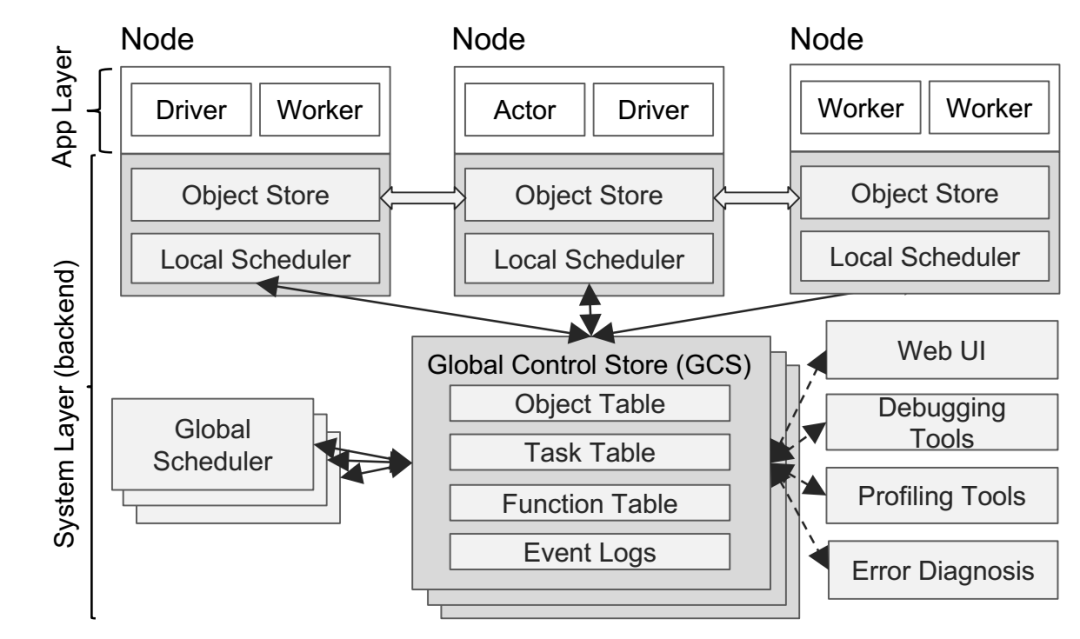
圖片來源:論文《Ray: A Distributed Framework for Emerging AI Applications》
Cosmos實例
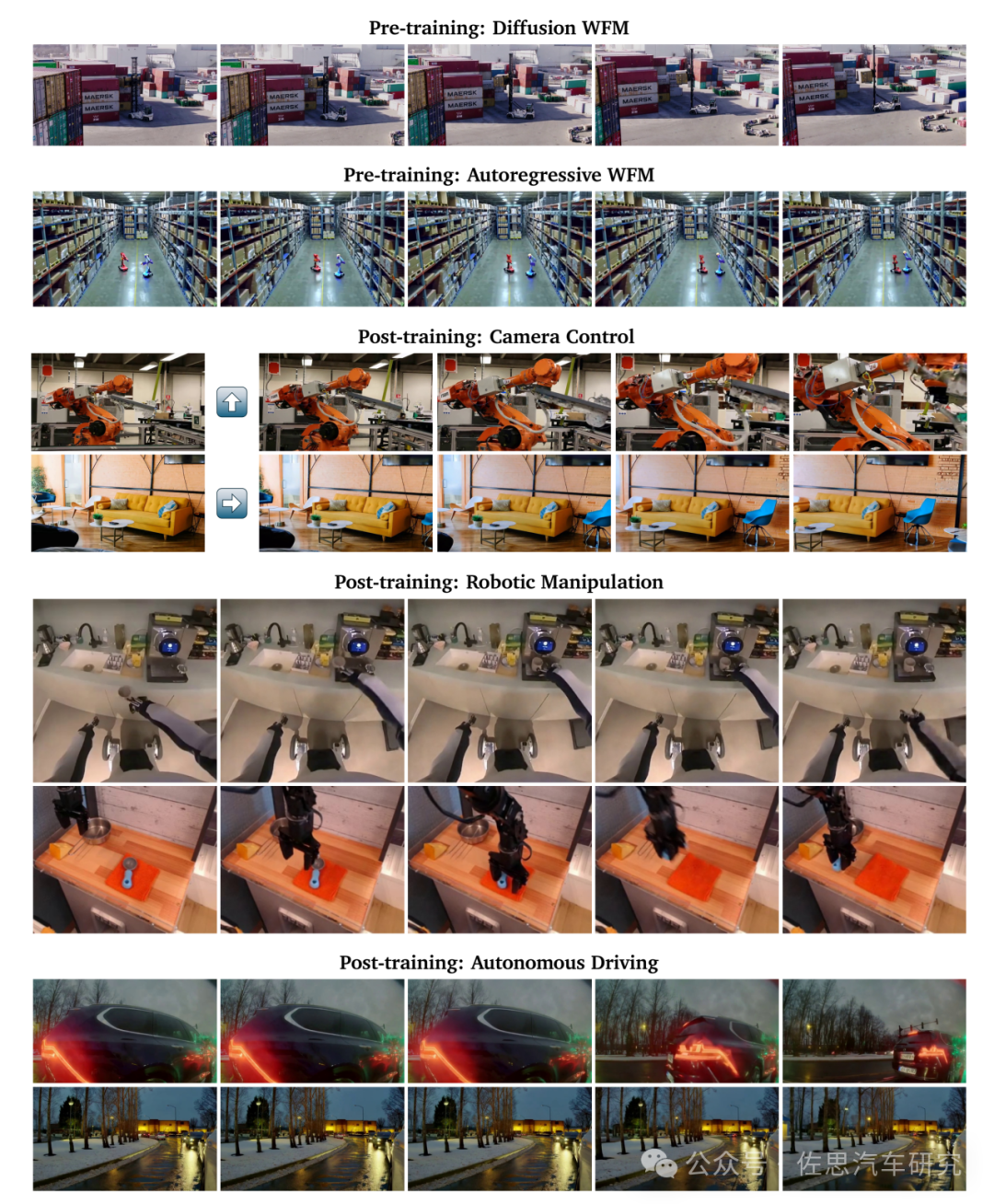
圖片來源:英偉達
預(yù)訓(xùn)練的Cosmos WFM生成高質(zhì)量的3D視頻并且包含正確的物理世界分布與反應(yīng)。使用連續(xù)和分離潛在表示(latent representation)來訓(xùn)練視頻。

圖片來源:英偉達
WFM是基石,再根據(jù)下游具體應(yīng)用做出對應(yīng)的定制數(shù)據(jù)集,再進行訓(xùn)練。
華為DriveGPT4
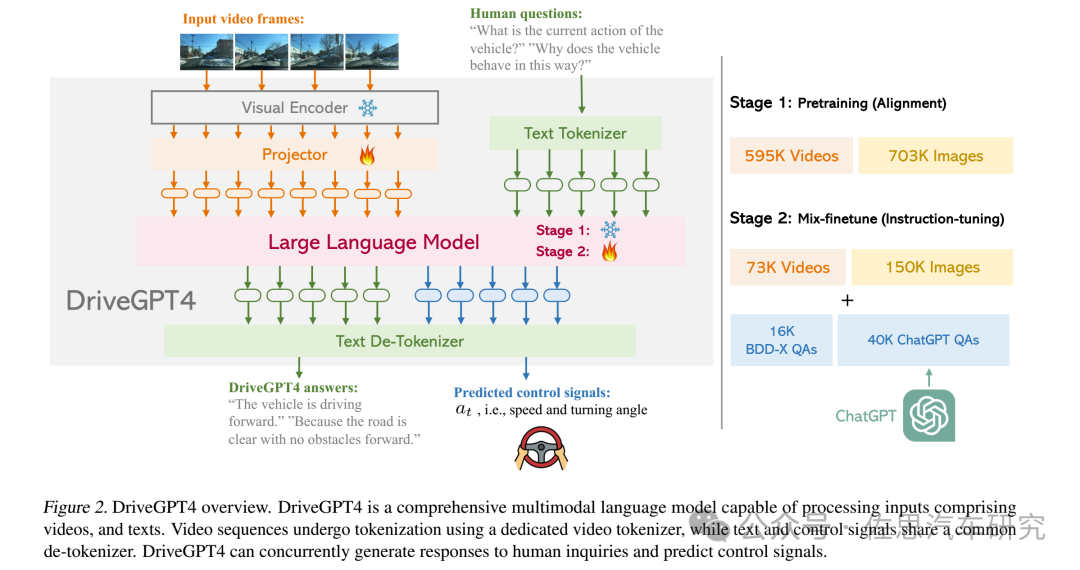
圖片來源:華為DriveGPT4論文
這和自動駕駛領(lǐng)域?qū)LM微調(diào)一樣,華為使用的是META開源的LLaMA 2,使用BDD-X和ChatGPT做指令微調(diào)。這些指令實際就是prompt,它包括動作命令、軌跡規(guī)劃和具體指令。這些prompt需要從現(xiàn)實物理世界中搜集,并做一一對應(yīng)。
Cosmos構(gòu)成
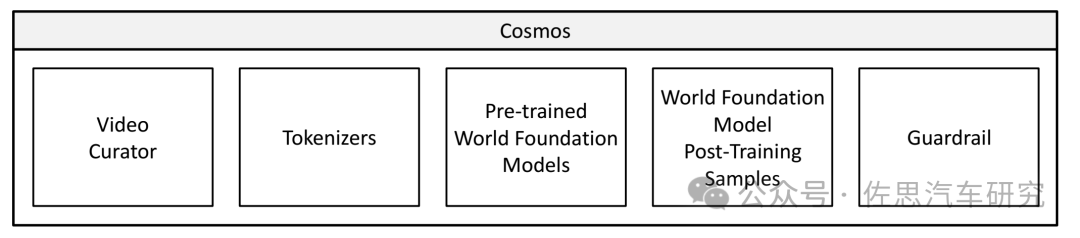
圖片來源:英偉達
Cosmos視頻篩選步驟
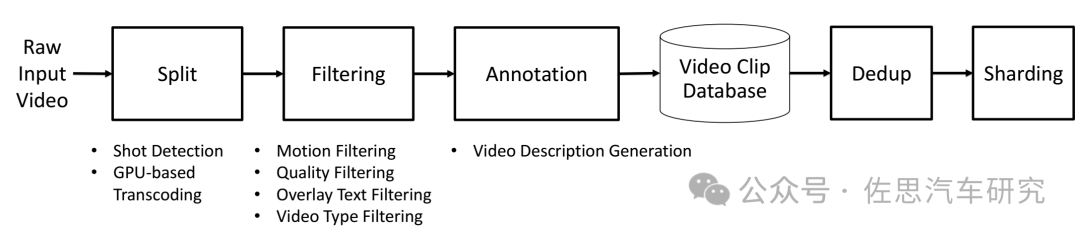
圖片來源:英偉達
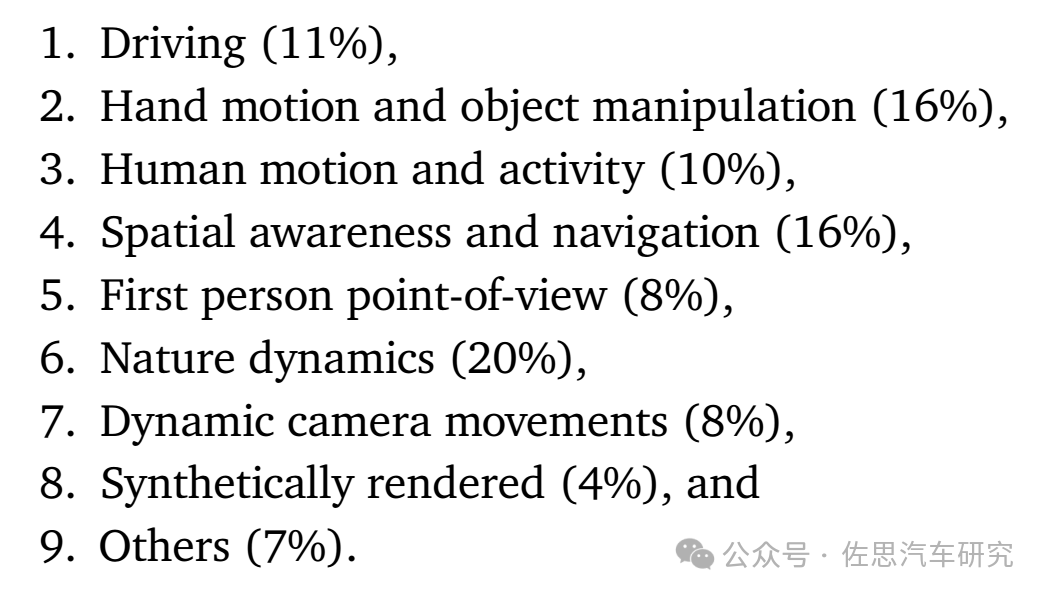
上面是Cosmos視頻類型構(gòu)成,駕駛類占了11%,手動作和物體操縱占16%,人類動作和活動占10%,空間認知和導(dǎo)航占16%,第一人稱視角占8%,自然動態(tài)占20%。由此看出,Cosmos主要還是面向機器人和具身智能的。
Cosmos的Tokenizer
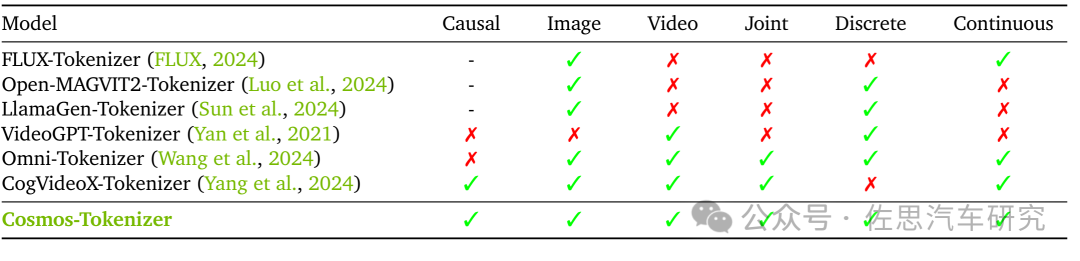
圖片來源:英偉達
Cosmos的Tokenizer可以對應(yīng)各種類型的輸入。
Cosmos擴散WFM模型1.0版架構(gòu)
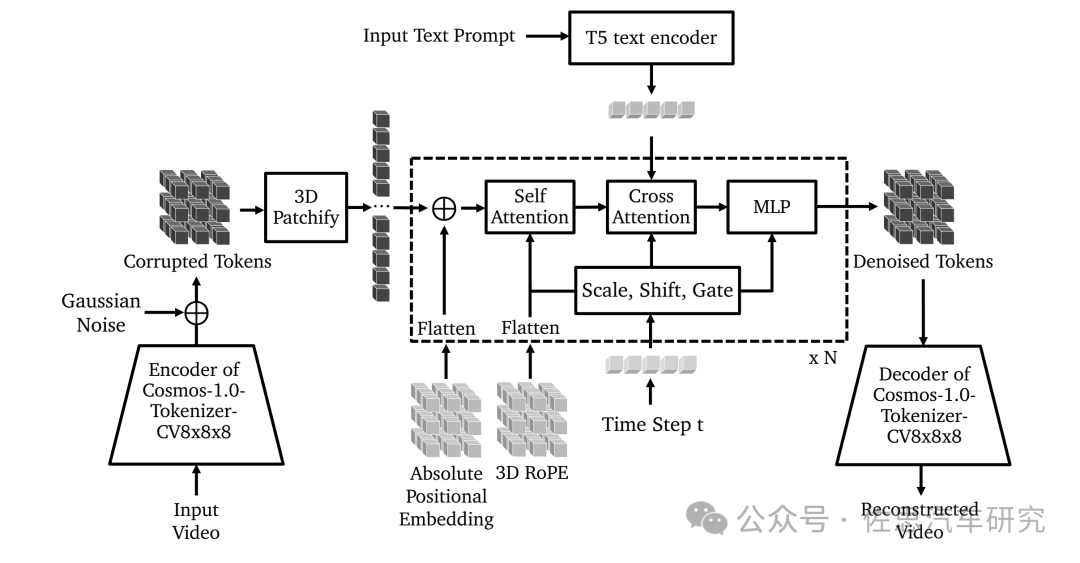
圖片來源:英偉達
Cosmos擴散WFM模型1.0版架構(gòu),tokenizer分的很細,且是3D的,國內(nèi)受限于計算資源,都盡量減少token數(shù)量,這會導(dǎo)致準(zhǔn)確率下降。英偉達自然是絲毫不在意計算資源的。
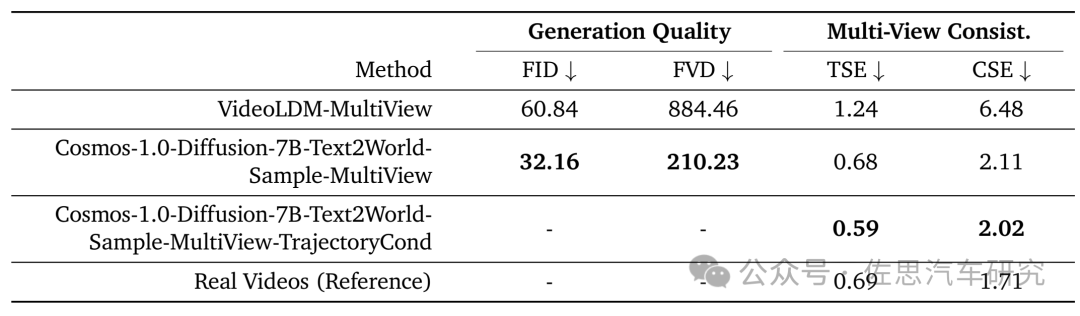
Cosmos生成多個視角視頻
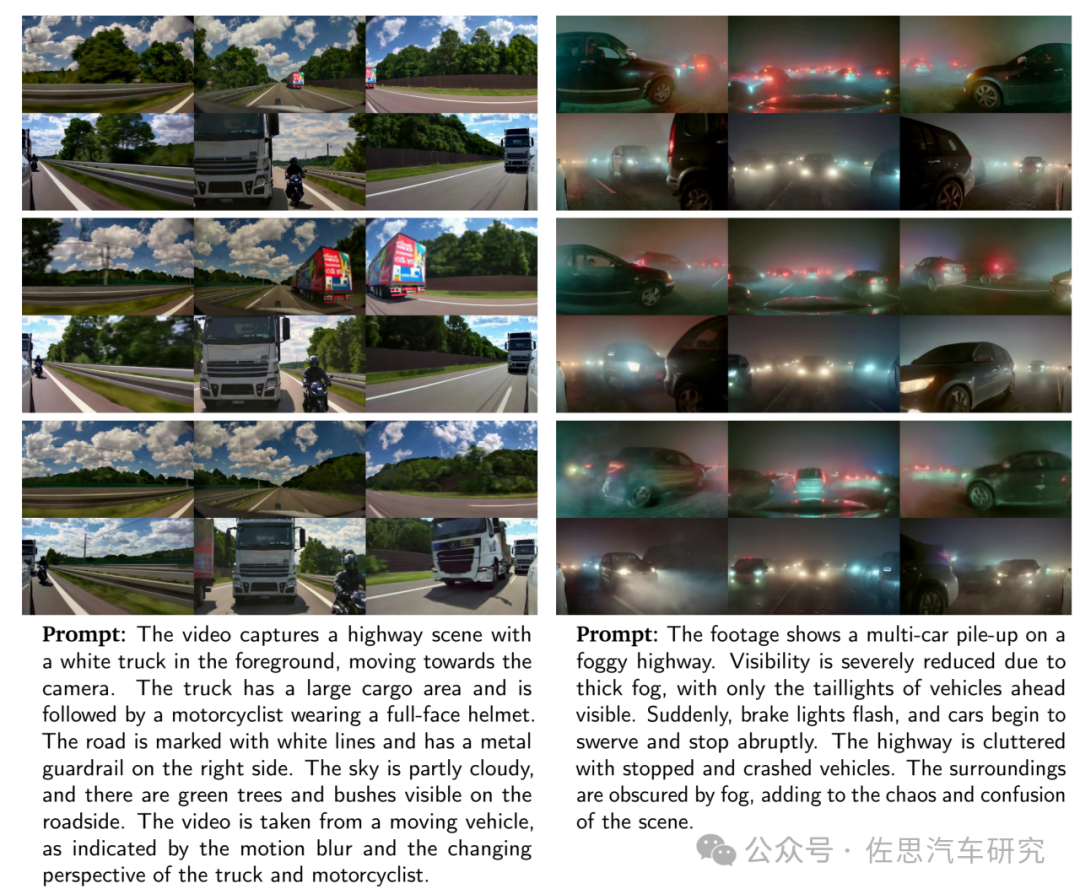
Text-conditioned samples generated by Cosmos-1.0-Di?usion-7B-Text2World-SampleMultiView, extended to 8 seconds by Cosmos-1.0-Di?usion-7B-Video2World-Sample-MultiView.
圖片來源:英偉達
多視角視頻目前國內(nèi)已知的只有華為的MagicDriveDiT。
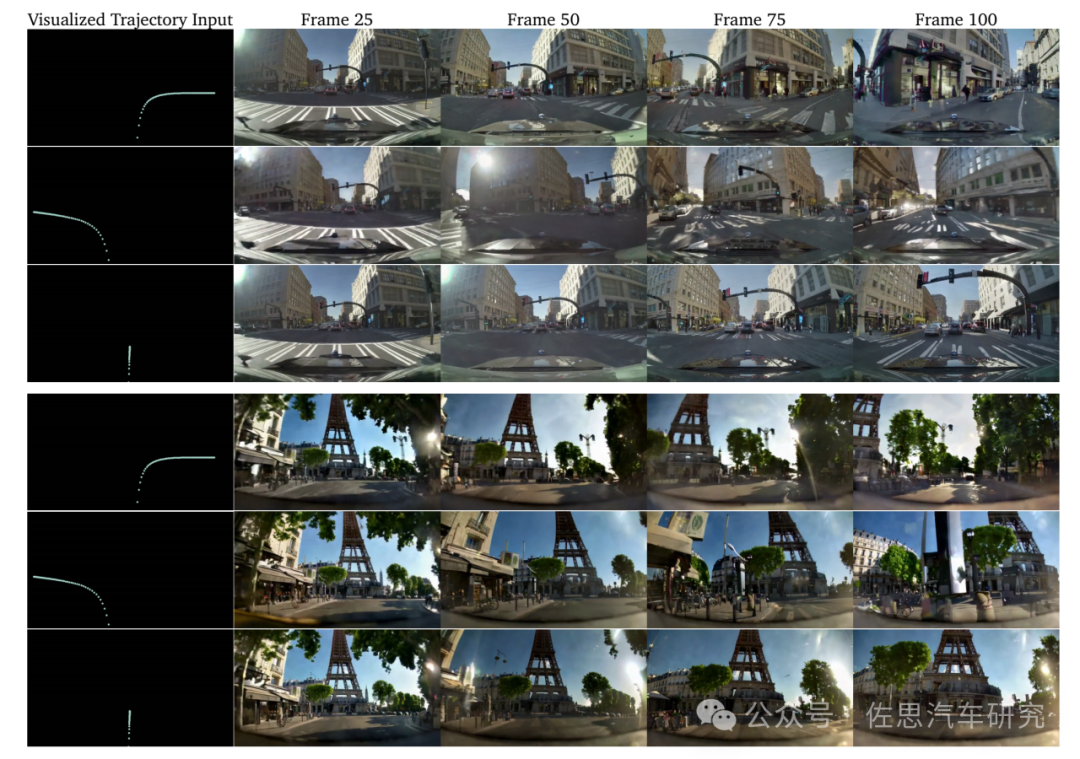
Trajectory-conditioned generated samples from Cosmos-1.0-Di?usion-7B-Text2World-SampleMultiView-TrajectoryCond.,給定軌跡,生成需要的視頻,同樣是多視角的,圖片只顯示了前攝像頭視角。
圖片來源:英偉達
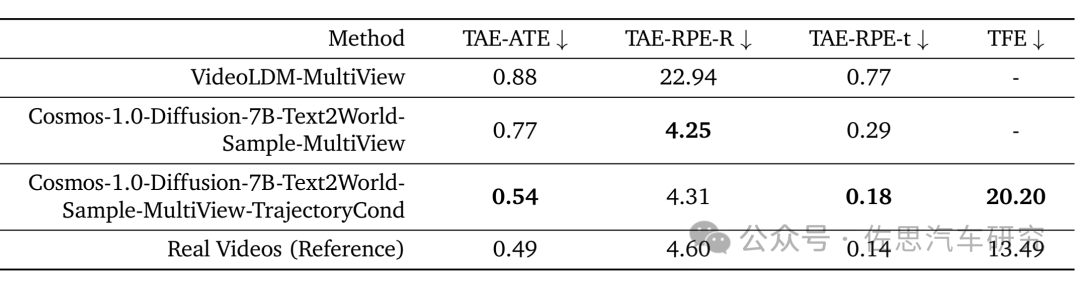
圖片來源:英偉達
軌跡誤差即TFE的單位是厘米,與真實即groundtruth的誤差小于7厘米。
圖片來源:英偉達
視頻生成質(zhì)量指標(biāo)主要是FID和FVD,F(xiàn)ID(Fréchet Inception Distance)是一種用于評估生成模型,尤其是在圖像生成任務(wù)中,生成圖像的質(zhì)量和多樣性的指標(biāo)。它通過比較生成圖像與真實圖像在特定空間內(nèi)的分布來工作。這個特定的空間通常是通過預(yù)訓(xùn)練的Inception網(wǎng)絡(luò)的某一層來定義的。對于生成圖像集和真實圖像集,分別通過Inception網(wǎng)絡(luò)(通常是Inception V3模型)計算它們的特征表示。這一步驟會得到每個圖像集的特征向量。計算每個集合的特征向量的均值和協(xié)方差矩陣,并做對比。FVD和FID接近,相當(dāng)于把FID的圖像特征提取網(wǎng)絡(luò)換成視頻特征提取網(wǎng)絡(luò),其他都差不多。
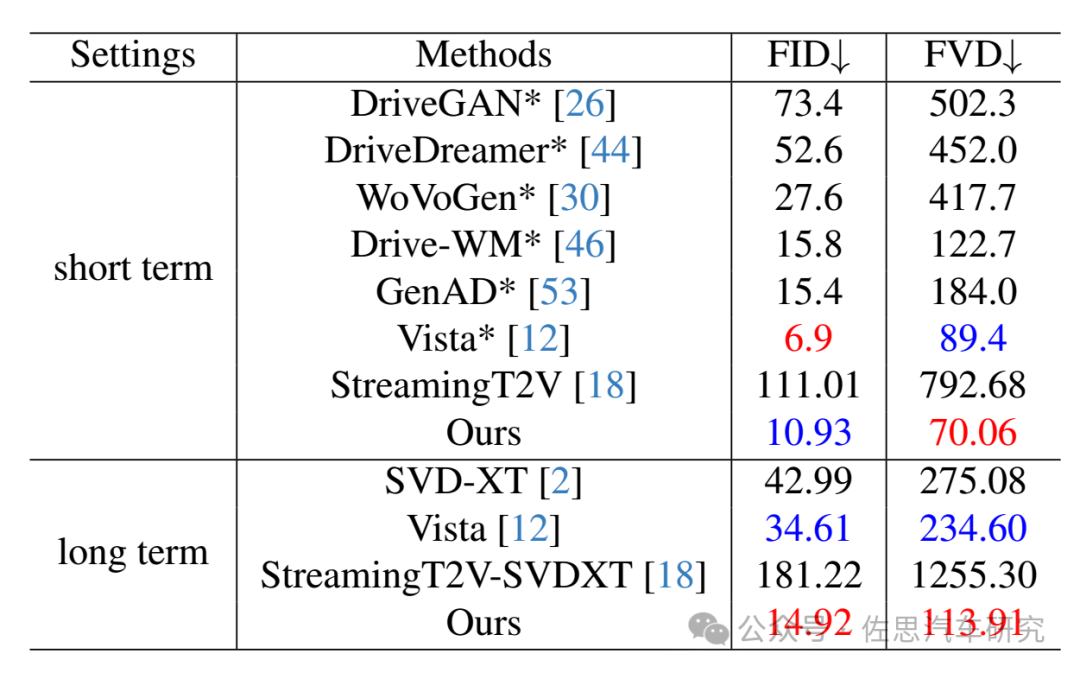
注:這里的Ours指商湯的InfinityDrive
圖片來源:商湯科技
商湯的要比英偉達優(yōu)秀很多,但英偉達是3D且是多視角,能達到中上游水平已經(jīng)是相當(dāng)優(yōu)秀了,英偉達在3D方面實力是最強的,沒有之一。
Cosmos的數(shù)據(jù)保護
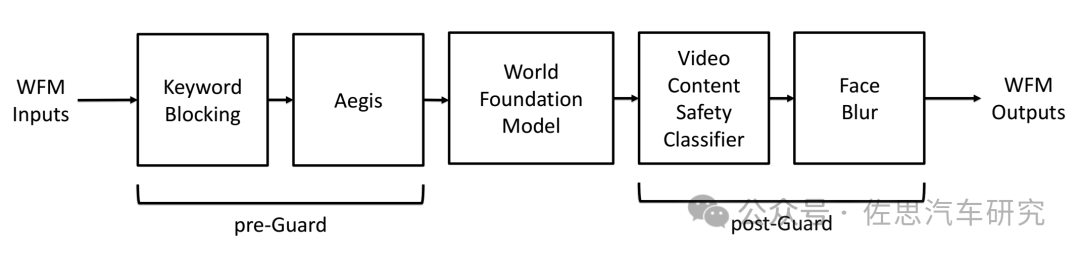
圖片來源:英偉達
視頻可能牽涉的隱私和安全問題,英偉達已經(jīng)替你想過了,完全不用擔(dān)心。
英偉達Cosmos的推出對于智能駕駛特別是端到端智能駕駛有了極大的幫助,廠家的數(shù)據(jù)成本下降至少95%,數(shù)據(jù)的質(zhì)量還更好,對于那些靠搜集真實數(shù)據(jù)的純數(shù)據(jù)集公司來說是滅頂之災(zāi),對于極佳、商湯和華為之流世界模型廠家則提出了嚴(yán)峻的挑戰(zhàn)。
-
機器人
+關(guān)注
關(guān)注
211文章
28641瀏覽量
208405 -
AI
+關(guān)注
關(guān)注
87文章
31513瀏覽量
270328 -
英偉達
+關(guān)注
關(guān)注
22文章
3847瀏覽量
91970
原文標(biāo)題:英偉達推出基石世界模型Cosmos,徹底解決智駕與機器人具身智能訓(xùn)練數(shù)據(jù)問題
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論