") 手勢(shì)識(shí)別在車(chē)內(nèi)交互領(lǐng)域能否煥發(fā)新生?
手勢(shì)識(shí)別在車(chē)內(nèi)交互領(lǐng)域能否煥發(fā)新生?
2017年9月7日,中德合璧的拜騰汽車(chē)橫空出世,致力于做國(guó)內(nèi)版“特斯拉”的這家公司,除了在南京設(shè)有生產(chǎn)基地外,整個(gè)產(chǎn)品平臺(tái)、產(chǎn)品設(shè)計(jì)、產(chǎn)品技術(shù)和配件等都在慕尼黑。
發(fā)布會(huì)上,拜騰推出了將于2019年面世的首款產(chǎn)品-純電動(dòng)中型SUV車(chē)型,這輛車(chē)最大的亮點(diǎn)是——配有一款尺寸驚人的液晶屏,具體尺寸是長(zhǎng)125厘米、高25厘米。
這塊屏幕在2018CES上大出風(fēng)頭,但隱藏在其背后的,還有另外一項(xiàng)功能:動(dòng)態(tài)手勢(shì)操控。
什么是動(dòng)態(tài)手勢(shì)操控?這還得從手勢(shì)本身說(shuō)起。
手勢(shì)是人手或者手和手臂結(jié)合產(chǎn)生的多種動(dòng)作,通常分為靜態(tài)手勢(shì)和動(dòng)態(tài)手勢(shì)。簡(jiǎn)單來(lái)說(shuō),靜態(tài)手勢(shì)只需要判斷某個(gè)時(shí)間點(diǎn)上手勢(shì)的外形特征即可,而動(dòng)態(tài)手勢(shì)則需采集一段時(shí)間內(nèi)持續(xù)的動(dòng)作,進(jìn)行分析,增加了時(shí)間信息和動(dòng)作特征。因此動(dòng)態(tài)手勢(shì)識(shí)別的難度要大于靜態(tài)手勢(shì)。
手勢(shì)識(shí)別通常是出現(xiàn)在VR/AR領(lǐng)域,原本多用于家庭娛樂(lè)、智能穿戴領(lǐng)域,但由于價(jià)格高昂,此項(xiàng)技術(shù)一直沒(méi)有大規(guī)模應(yīng)用。而原本在此領(lǐng)域扮演重要角色的手勢(shì)識(shí)別,也沒(méi)能大展身手。那么作為一個(gè)新的應(yīng)用場(chǎng)景,手勢(shì)識(shí)別在車(chē)內(nèi)交互領(lǐng)域能否煥發(fā)新生?
《高工智能汽車(chē)》采訪(fǎng)了凌感科技(Usens)美國(guó)產(chǎn)品和運(yùn)營(yíng)副總裁王亞明,來(lái)聽(tīng)聽(tīng)他怎么說(shuō)。
王亞明畢業(yè)于麻省理工學(xué)院,有20年的軟件和嵌入式系統(tǒng)經(jīng)驗(yàn)。此前曾擔(dān)任美國(guó)微軟、Intel風(fēng)河公司、聯(lián)發(fā)科的高層,擔(dān)任產(chǎn)品總監(jiān)和企業(yè)高級(jí)管理,現(xiàn)任凌感科技美國(guó)公司總經(jīng)理。
手勢(shì)識(shí)別的二三事兒
手勢(shì)識(shí)別的實(shí)現(xiàn)方式,經(jīng)歷了二維到三維的轉(zhuǎn)變。二維手型識(shí)別,也稱(chēng)靜態(tài)二維手勢(shì)識(shí)別,識(shí)別的是手勢(shì)中最簡(jiǎn)單的一類(lèi)。只能識(shí)別出幾個(gè)靜態(tài)的手勢(shì)動(dòng)作,比如握拳或者五指張開(kāi)。這種手勢(shì)識(shí)別本身是通過(guò)視覺(jué)分析算法,得到預(yù)設(shè)圖像和拍攝圖像的差異,然后理解手勢(shì)的含義。
更確切的來(lái)講,是一種手形識(shí)別,而非手勢(shì),因?yàn)槭謩?shì)是三維動(dòng)態(tài)的。二維手勢(shì)識(shí)別拓展性差、控制感弱,因此通常只用來(lái)實(shí)現(xiàn)一些簡(jiǎn)單的功能。
另外一種二維手勢(shì)識(shí)別,通過(guò)更先進(jìn)的計(jì)算機(jī)視覺(jué)算法,具有了追蹤手勢(shì)運(yùn)動(dòng)的能力,體驗(yàn)上從純粹的狀態(tài)控制,變成了比較豐富的平面控制。
為了實(shí)現(xiàn)更豐富場(chǎng)景的應(yīng)用,手勢(shì)識(shí)別引入了三維的方式。三維的手勢(shì)識(shí)別主要是增加了Z軸的信息,即目標(biāo)的距離。二維的圖像在得到距離值后,便可以構(gòu)建出立體的模型,通過(guò)追蹤不同時(shí)刻目標(biāo)物體的三維立體形態(tài)變化,識(shí)別、認(rèn)識(shí)不同的形態(tài),也就可以到更多與之相匹配的的標(biāo)準(zhǔn)含義。這就直接豐富了手勢(shì)識(shí)別的數(shù)量、類(lèi)型。
三維手勢(shì)識(shí)別的實(shí)現(xiàn)方式,通常有三種,結(jié)構(gòu)光(Structure Light)、光飛時(shí)間(Time of Flight)、多角成像(Multi-camera)。結(jié)構(gòu)光是通過(guò)激光投射器投射激光束,經(jīng)過(guò)光柵打到物體上產(chǎn)生折射的位移,然后用攝像頭來(lái)采集圖樣,通過(guò)圖樣的位移變化,算出物體的位置、深度信息。這種方式使用的最佳范圍是1米到4米。
光飛時(shí)間的方式是用CMOS傳感器接收發(fā)光原件發(fā)射到物體上的反射光,然后通過(guò)光子的飛行時(shí)間計(jì)算距離,這種方式簡(jiǎn)單,不需要計(jì)算機(jī)視覺(jué)方面的能力。
還有一種就是多角成像的原理,使用兩個(gè)或者兩個(gè)以上的攝像頭同時(shí)攝取圖像,模擬人類(lèi)視覺(jué),得到目標(biāo)物體的距離信息,類(lèi)似于雙目測(cè)距。這種技術(shù)依賴(lài)于計(jì)算機(jī)視覺(jué)算法來(lái)匹配兩張圖片里的相同目標(biāo),相對(duì)前兩種技術(shù)而言,性?xún)r(jià)比較高。
結(jié)緣拜騰
凌感科技成立于2013年,是一家為AR/VR提供三維人機(jī)交互解決方案的高科技公司,目前已經(jīng)在硅谷、北京、杭州、深圳等地設(shè)立研發(fā)及運(yùn)營(yíng)中心。其核心技術(shù)通過(guò)識(shí)別手部22個(gè)關(guān)鍵點(diǎn),26個(gè)自由度,辨別手部姿態(tài),實(shí)現(xiàn)全手勢(shì)識(shí)別。
引以為傲的Inside-out追蹤技術(shù),檢測(cè)人頭部的旋轉(zhuǎn)及運(yùn)動(dòng)位移,實(shí)現(xiàn)6自由度位置跟蹤,真實(shí)還原人在現(xiàn)實(shí)世界中的體驗(yàn)效果,是VR沉浸感不可或缺的重要指標(biāo)之一。
凌感科技在傳統(tǒng)的消費(fèi)者領(lǐng)域,手勢(shì)識(shí)別的能力較強(qiáng),但由于諸多原因,VR/AR并沒(méi)有如人們想象的一樣快速的成長(zhǎng)起來(lái),行業(yè)進(jìn)入了較長(zhǎng)的蟄伏期。
汽車(chē)的車(chē)內(nèi)交互方式,通常有語(yǔ)音、手勢(shì)、觸控、物理摁鍵等方式,隨著汽車(chē)的智能化來(lái)臨,前兩種方式逐漸有取代傳統(tǒng)交互方式的趨勢(shì)。
其中,車(chē)內(nèi)手勢(shì)交互屬于新事物,在存量車(chē)中較為少見(jiàn),大多出現(xiàn)在一些新的概念車(chē)中。相比于傳統(tǒng)的AR/VR領(lǐng)域,車(chē)內(nèi)手勢(shì)識(shí)別目前主要停留在簡(jiǎn)單動(dòng)作識(shí)別層面,要求可靠穩(wěn)定、快速響應(yīng)。
凌感科技的車(chē)內(nèi)交互之路,源于一次偶然。拜騰汽車(chē)在推出新款車(chē)型時(shí),準(zhǔn)備在車(chē)上加入手勢(shì)識(shí)別的功能。
拜騰汽車(chē)采用了50英寸共享全面屏,對(duì)這款屏幕的操作方式,公司希望可以實(shí)現(xiàn)手勢(shì)動(dòng)態(tài)操控。即駕駛員可通過(guò)手勢(shì),完成原有觸控、摁鍵要完成的功能。
對(duì)于原來(lái)做車(chē)內(nèi)手勢(shì)識(shí)別的企業(yè)而言,這種需求完成難度大,對(duì)手勢(shì)識(shí)別的精準(zhǔn)度、穩(wěn)定性以及響應(yīng)速度都提出了更高的要求,同時(shí)在功能的豐富性方面也不可同日而語(yǔ)。
但對(duì)于做AR/VR手勢(shì)識(shí)別出身的凌感科技而言,車(chē)載手勢(shì)識(shí)別從功能豐富性上是做了減法,需要適應(yīng)的是車(chē)載要求的一些規(guī)范。
由于凌感科技主要做的是軟件算法層面的工作,且手勢(shì)識(shí)別的方式有TOF、多角成像等方式,硬件層面只需要找相應(yīng)符合要求的攝像頭生產(chǎn)商即可。因此,滿(mǎn)足汽車(chē)要求的產(chǎn)品方案,并不難產(chǎn)。
彼時(shí)業(yè)內(nèi)符合其要求的,并沒(méi)有幾家,凌感科技接受了工作邀請(qǐng),并且完成了其車(chē)載手勢(shì)識(shí)別的第一次嘗試。應(yīng)用在拜騰汽車(chē)上的手勢(shì)識(shí)別,有“開(kāi)始”、“拖曳”、“指向”、“菜單”、“OK”五個(gè)手勢(shì),駕駛員只需要伸出右手,完成相應(yīng)動(dòng)作即可進(jìn)行操控。
跟拜騰的合作比較順利,也讓公司意識(shí)到,除了傳統(tǒng)領(lǐng)域,正在興起的智能汽車(chē)交互,也將會(huì)是另外一個(gè)市場(chǎng)。
TOF景深、單目IR
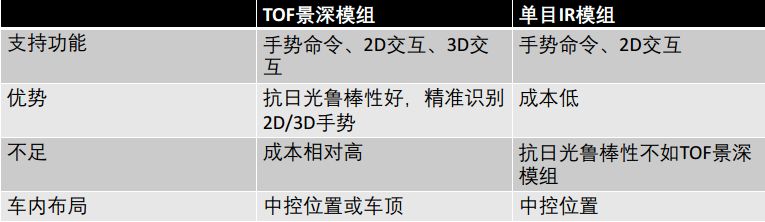
凌感科技目前提供的針對(duì)車(chē)載手勢(shì)交互的產(chǎn)品中,支持2種模組。其手勢(shì)識(shí)別可支持的使用范圍包括,主副駕駛、后排乘客交互的多種場(chǎng)景。
其中在主駕駛位上的交互,包含中控屏、HUD的交互,副駕駛位和中控屏的交互,以及后排乘客和乘客屏的交互。
交互的方式主要有:
? 命令式手勢(shì)(Gesture):接聽(tīng)電話(huà), 調(diào)節(jié)音量, 選取歌曲等
? 2D動(dòng)態(tài)交互:操作2D圖形界面, 娛樂(lè), 社交, 工作
? 3D動(dòng)態(tài)交互:操作圖形界面, 娛樂(lè), 社交
凌感科技美國(guó)產(chǎn)品和運(yùn)營(yíng)副總裁王亞明表示,就目前而言,車(chē)內(nèi)手勢(shì)交互限于硬件條件(液晶大屏尚未普及),只完成少數(shù)簡(jiǎn)單幾項(xiàng)的功能,并不豐富。
但手勢(shì)識(shí)別本質(zhì)上可以大大提升車(chē)內(nèi)操控的體驗(yàn),并不需要駕駛員分心,去觀(guān)察傳統(tǒng)觸控、摁鍵完成操控的位置以及功能,操作人員僅僅需要記住相應(yīng)功能的手勢(shì),即可完成操控。
而隨著車(chē)內(nèi)大屏的更新?lián)Q代,越來(lái)越多的功能需要觸控去完成,對(duì)于駕駛的安全有一定的影響,如果能用手勢(shì)代替原有的操控,將會(huì)大大提升駕乘體驗(yàn),
同時(shí),相比于車(chē)內(nèi)的另外一種交互方式——語(yǔ)音交互,手勢(shì)識(shí)別也有其它的一些優(yōu)勢(shì)。語(yǔ)音交互是通過(guò)機(jī)器識(shí)別人類(lèi)語(yǔ)言,完成功能響應(yīng)。
一方面,語(yǔ)音識(shí)別由于人類(lèi)語(yǔ)言的多樣性,識(shí)別算法的有效性,準(zhǔn)確性,很難達(dá)到通識(shí)天下語(yǔ)言,無(wú)往而不利。
另外一方面,人類(lèi)的一些操控行為,并不一定能全部用語(yǔ)言描述。比如對(duì)持續(xù)性命令的執(zhí)行(調(diào)節(jié)音量,調(diào)節(jié)音視頻播放速度、進(jìn)度等),較難量化的命令,語(yǔ)音識(shí)別就存在一定的局限性。
這類(lèi)似于鼠標(biāo)之于PC,其重要性很難被取代。
因此,手勢(shì)識(shí)別在未來(lái)的車(chē)內(nèi)交互領(lǐng)域,重要性一定會(huì)逐步體現(xiàn)。國(guó)際上一些傳統(tǒng)的汽車(chē)OEM廠(chǎng)商,已經(jīng)在其高端車(chē)上搭載了一些簡(jiǎn)單的手勢(shì)識(shí)別功能,其它車(chē)企也在觀(guān)望、試探階段。
王亞明相信,隨著汽車(chē)智能化的發(fā)展,手勢(shì)識(shí)別一定會(huì)廣泛進(jìn)入汽車(chē)市場(chǎng)。
車(chē)內(nèi)手勢(shì)識(shí)別的萌芽期
當(dāng)然,手勢(shì)識(shí)別的上車(chē)之路,還需要一定的過(guò)程。比如,最常見(jiàn)的就是手勢(shì)識(shí)別方案的成本、可靠性,準(zhǔn)確性,體驗(yàn)是否能達(dá)到廠(chǎng)商的要求。
公司目前針對(duì)汽車(chē)手勢(shì)識(shí)別,有兩種方案,一種是攝像頭放置在中控位,一種是在車(chē)頂位。
中控位的方式ToF景深模組和單目IR模組都適合。優(yōu)勢(shì)是能獲得比較清晰的手區(qū)域圖像, 遮擋小, 適合提取全手骨骼。不同車(chē)型的設(shè)置不一樣, 安裝的位置和角度需要根據(jù)實(shí)際車(chē)型調(diào)整, 算法也需要相應(yīng)進(jìn)行一定定制。
車(chē)頂位的方式適用深度攝像頭(比如BMW采用了這種方式) , 優(yōu)勢(shì)是能夠很好的控制水平方向距離, 適合手指類(lèi)的動(dòng)態(tài)操作、 點(diǎn)擊等。 劣勢(shì)是需要?jiǎng)幼鳂?biāo)準(zhǔn),否則隨意地動(dòng)作遮擋會(huì)多。
王亞明表示,無(wú)論哪種方式,都需要同車(chē)企深度合作,在汽車(chē)設(shè)計(jì)早期就進(jìn)入共同的研發(fā)階段。而這,不僅需要公司的實(shí)力過(guò)硬,同時(shí)產(chǎn)品的功能也能夠豐富,多樣。
由于手勢(shì)識(shí)別需要深度學(xué)習(xí)以及視覺(jué)的實(shí)時(shí)處理,對(duì)于硬件的算力也有一定的要求。通常的做法是分享汽車(chē)ECU算力或者配置單獨(dú)處理器。前者容易適配,改裝容易、價(jià)格便宜,主機(jī)廠(chǎng)商也樂(lè)意,但需要手勢(shì)識(shí)別部分的算力不占用太多資源。后者成本高昂,主機(jī)廠(chǎng)商接受度較低。
手勢(shì)識(shí)別初期在少量歐美高端車(chē)上的應(yīng)用,給全球其它車(chē)企起到了一定的示范作用。目前國(guó)內(nèi)的一些車(chē)企也在籌劃手勢(shì)識(shí)別進(jìn)車(chē)的事宜,手勢(shì)識(shí)別進(jìn)入汽車(chē)的速度可能會(huì)超出外界想象。
因此公司未來(lái)也會(huì)將更多的注意力以及重心放在汽車(chē)手勢(shì)識(shí)別領(lǐng)域。同時(shí),由于國(guó)內(nèi)是全球最大的汽車(chē)消費(fèi)、生產(chǎn)市場(chǎng),公司的重心也轉(zhuǎn)移到了國(guó)內(nèi)。目前凌感科技全球共有60余人的團(tuán)隊(duì),其中2/3在中國(guó),王亞明表示,其非常看好未來(lái)手勢(shì)識(shí)別在車(chē)內(nèi)的應(yīng)用。
-
手勢(shì)識(shí)別
+關(guān)注
關(guān)注
8文章
225瀏覽量
47861 -
智能汽車(chē)
+關(guān)注
關(guān)注
30文章
2893瀏覽量
107570
原文標(biāo)題:始于AR/VR,邂逅智能汽車(chē),結(jié)緣拜騰后的uSens靈感迸發(fā) | GGAI專(zhuān)訪(fǎng)
文章出處:【微信號(hào):ilove-ev,微信公眾號(hào):高工智能汽車(chē)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于語(yǔ)音識(shí)別的智能會(huì)議系統(tǒng)具備哪些交互功能
標(biāo)貝智能語(yǔ)音識(shí)別在智能會(huì)議場(chǎng)景中的落地案例

落地式一體機(jī),讓博物館煥發(fā)新生
基于毫米波雷達(dá)的手勢(shì)識(shí)別算法
基于毫米波雷達(dá)的手勢(shì)識(shí)別神經(jīng)網(wǎng)絡(luò)
OpenHarmony實(shí)戰(zhàn)開(kāi)發(fā)-手勢(shì)事件
基于FPGA技術(shù)的手勢(shì)識(shí)別控制型多功能機(jī)械臂系統(tǒng)
蘋(píng)果智能手表新專(zhuān)利:涉及UWB、手勢(shì)識(shí)別、非侵入式體溫監(jiān)測(cè)
【開(kāi)源獲獎(jiǎng)案例】隔空手勢(shì)識(shí)別測(cè)試系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論