 三菱PLC-QD77定位控制的目的與用途
三菱PLC-QD77定位控制的目的與用途
1. 定位控制的目的與用途
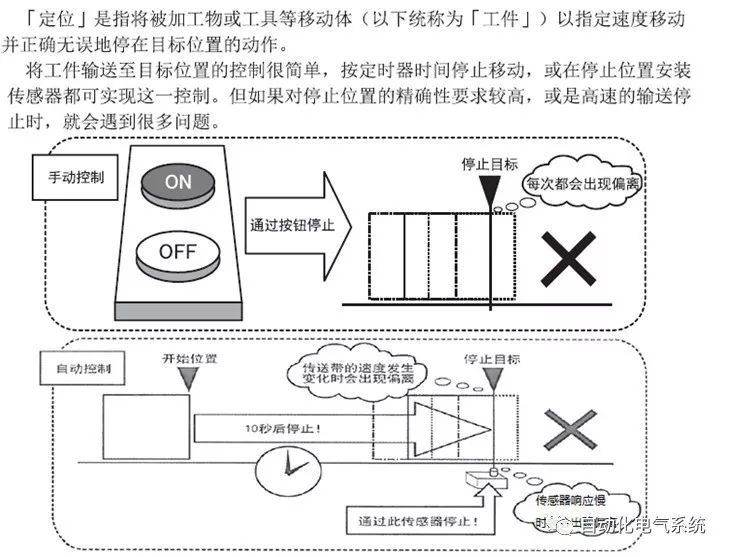
1.1什么是定位控制

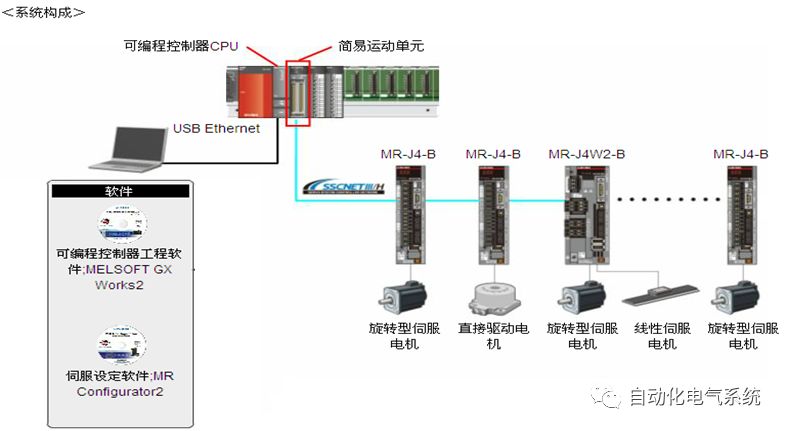
1.2定位系統的構成
精確定位控制的系統,又叫伺服系統。
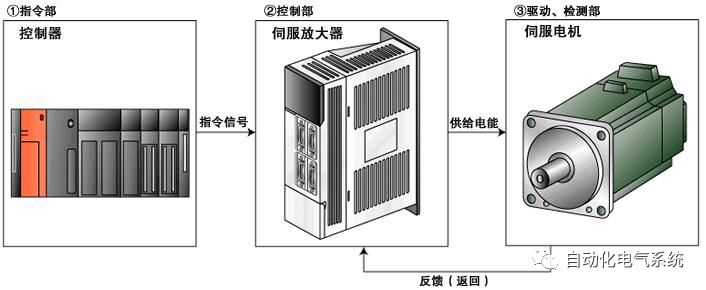
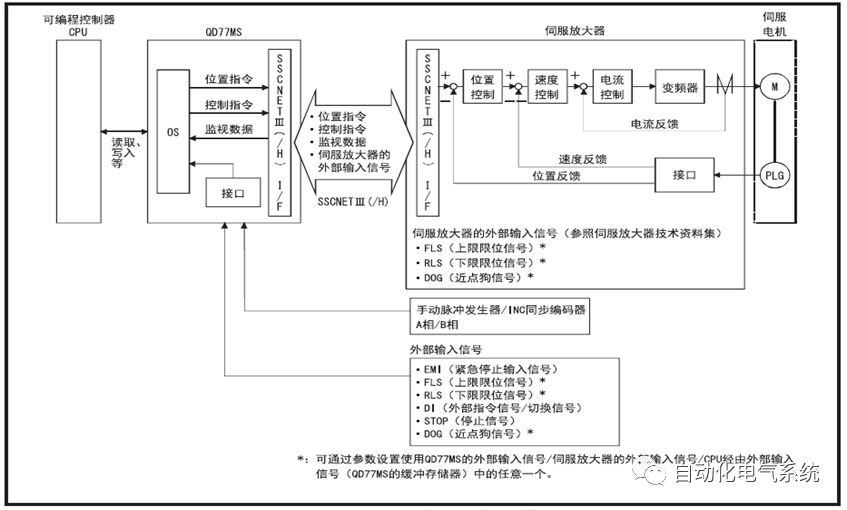
伺服放大器就是根據用戶在控制器輸入了目標值(位置,速度等)后,接受到伺服系統控制器的位置指令信息對當前值(位置,速度等反饋信號)進行檢測,驅動伺服電機始終朝縮小與目標值差距的方向進行控制的機構
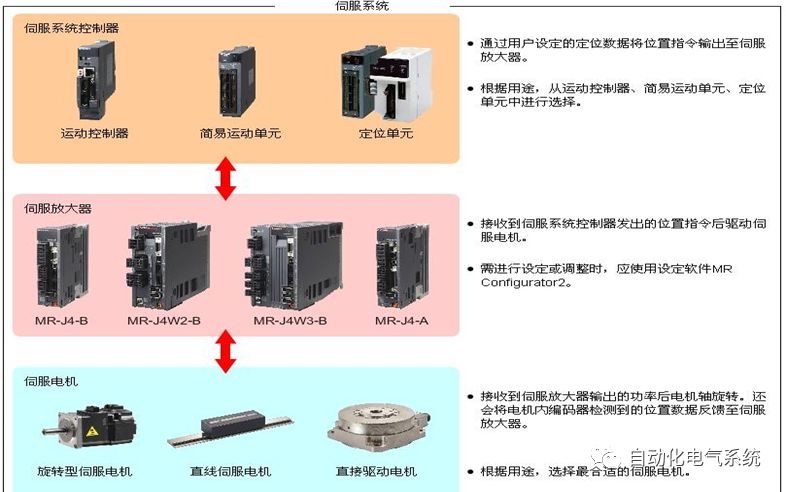
簡易運動單元構成的定位系統是指由可編程控制器CPU進行控制,輕松實現定位控制的智能單元。
QD77MS定位控制
1.3 定位控制的大致設計
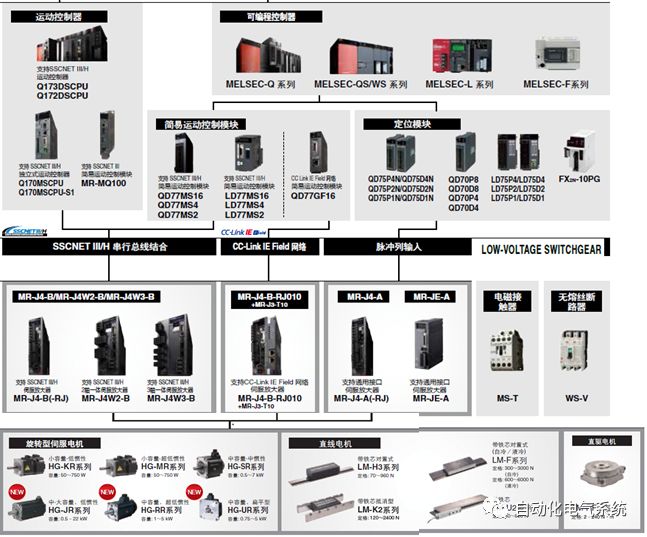
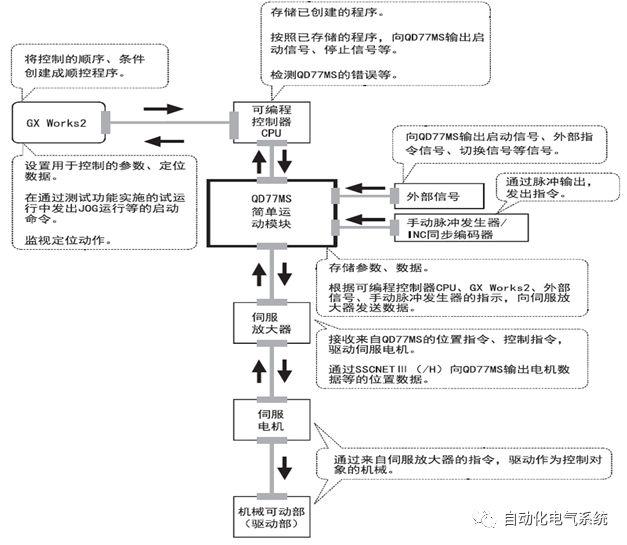
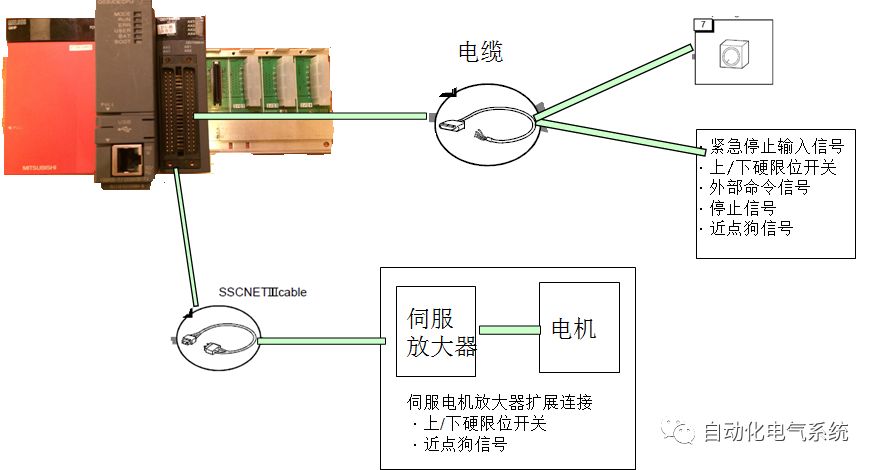
使用了QD77簡易運動單元的定位系統大概設計如下
QD77MS系統全貌
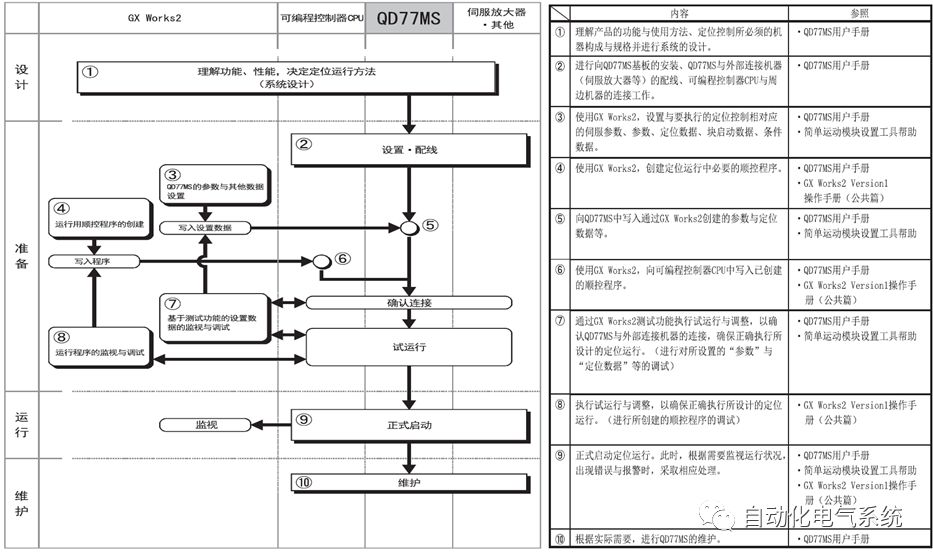
1.4定位系統應用流程
1.5QD77MS系統安裝個數


2.簡易運動模塊QD77的規格與功能
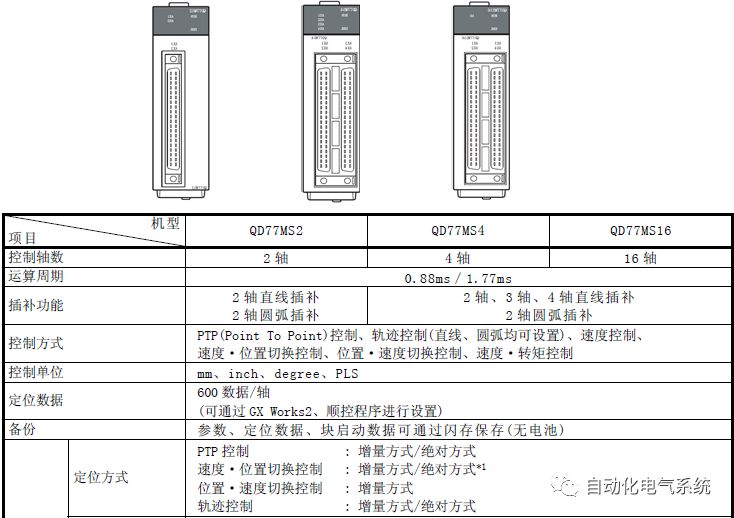
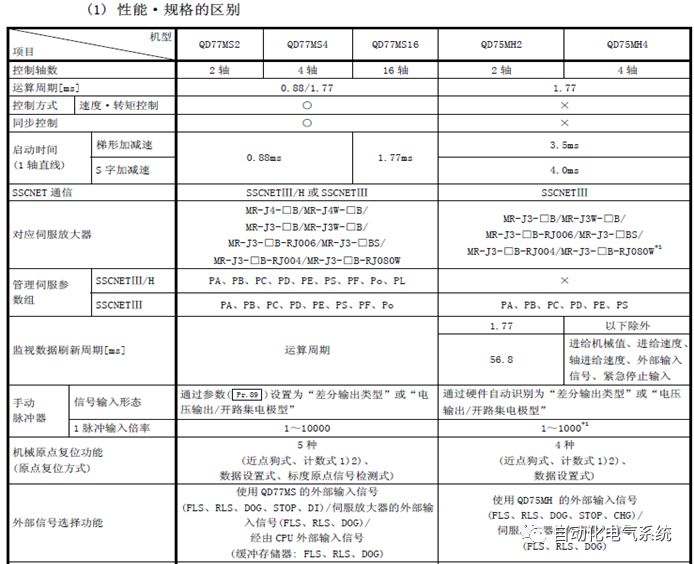
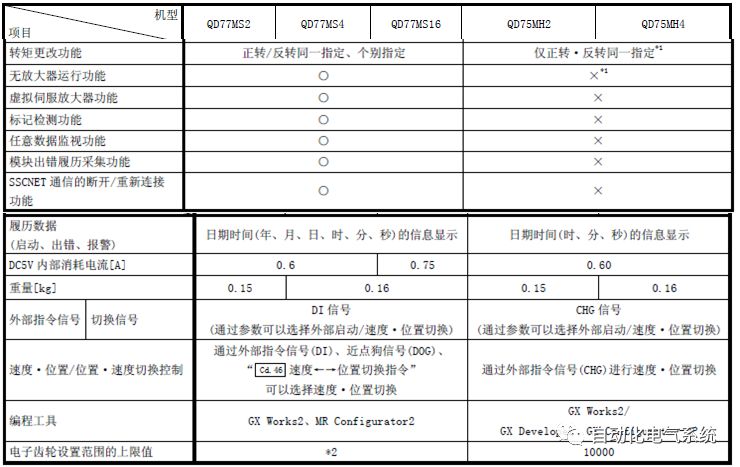
2.1QD77MS性能規格
2.2QD77MS與QD75MH的區別
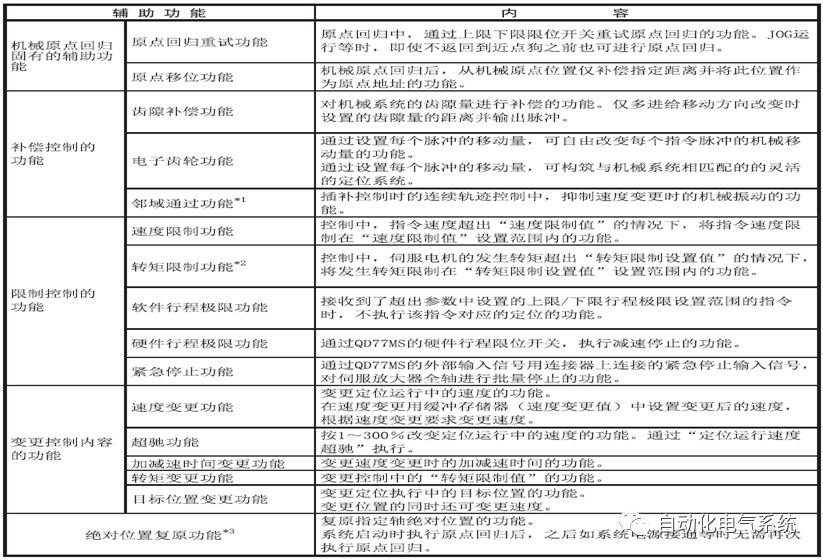
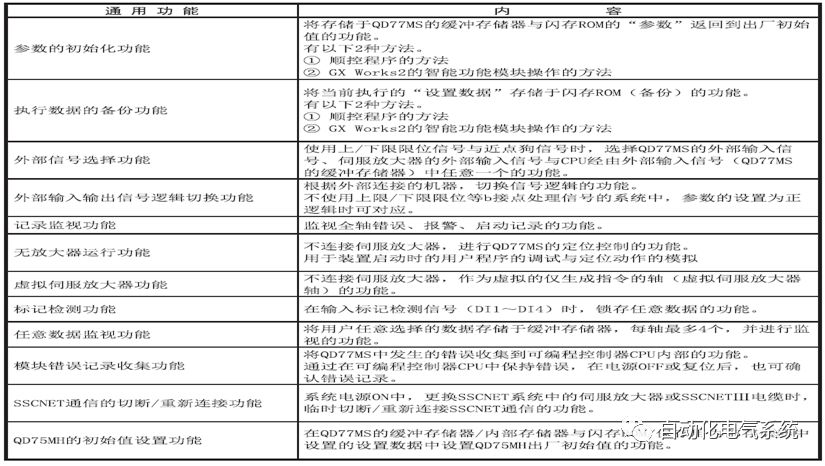
QD77MS的功能分為主要控制功能、通用功能以及輔助功能三部分。參考教材3-6。
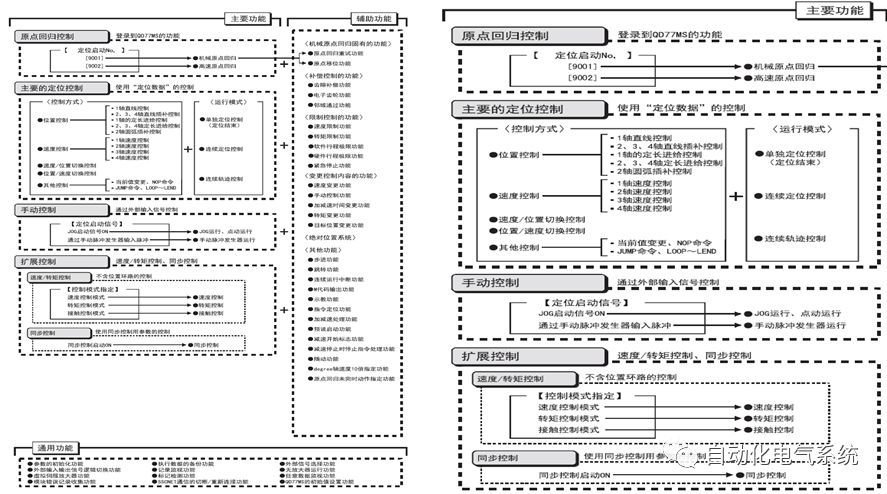
2.3QD77MS的功能


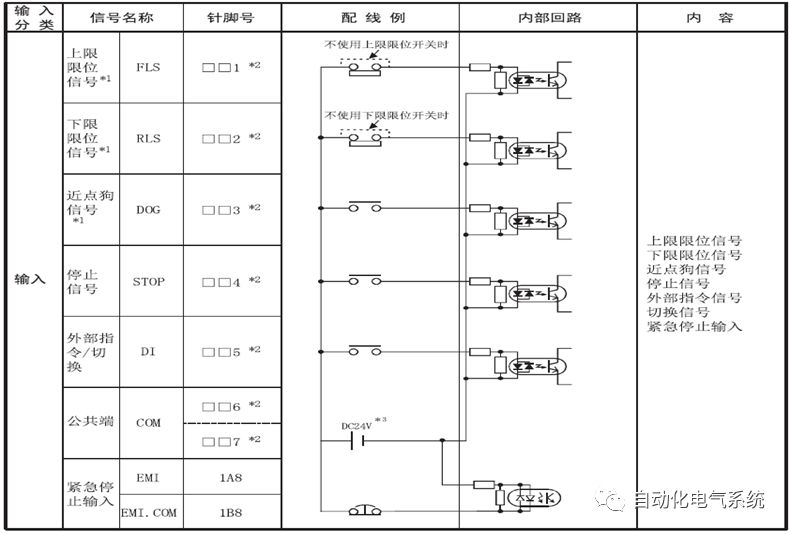
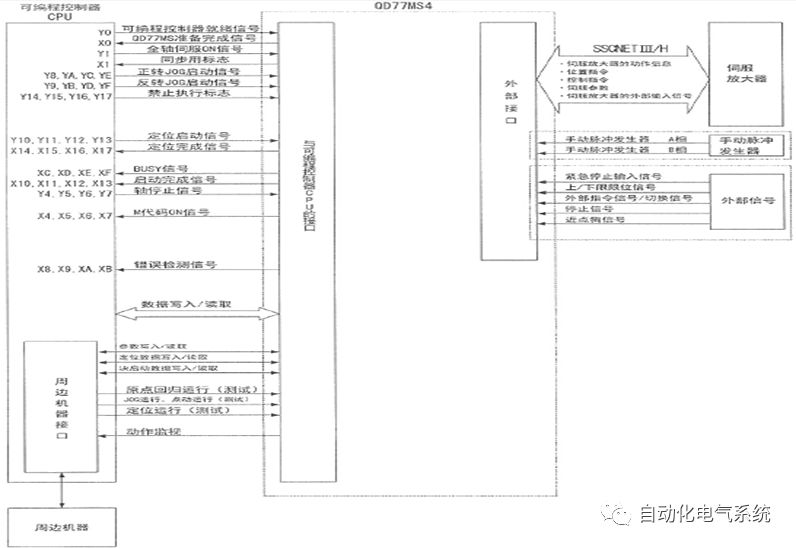
2.4與外部輸入輸出的接口
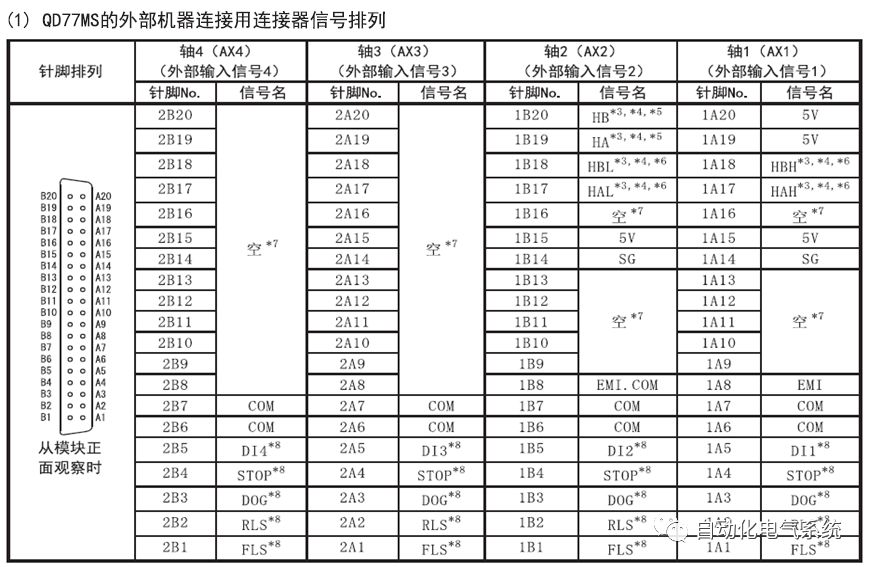
a)與外部輸入信號/緊急停止輸入信號的接口
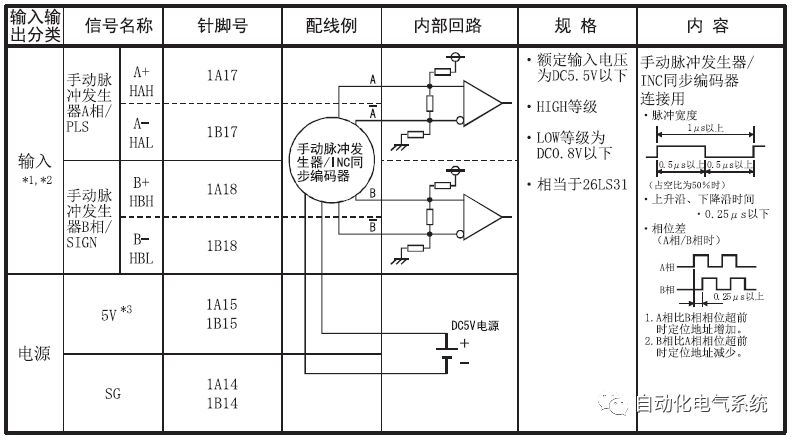
b)手動脈沖發生器/INC同步編碼器
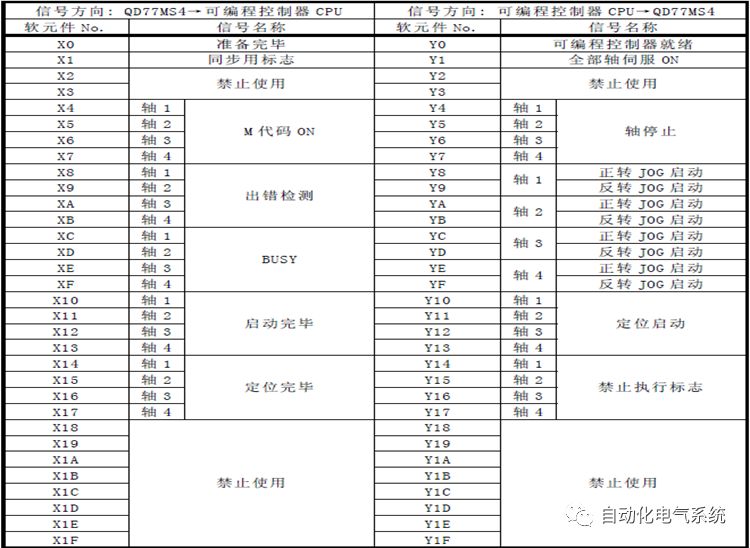
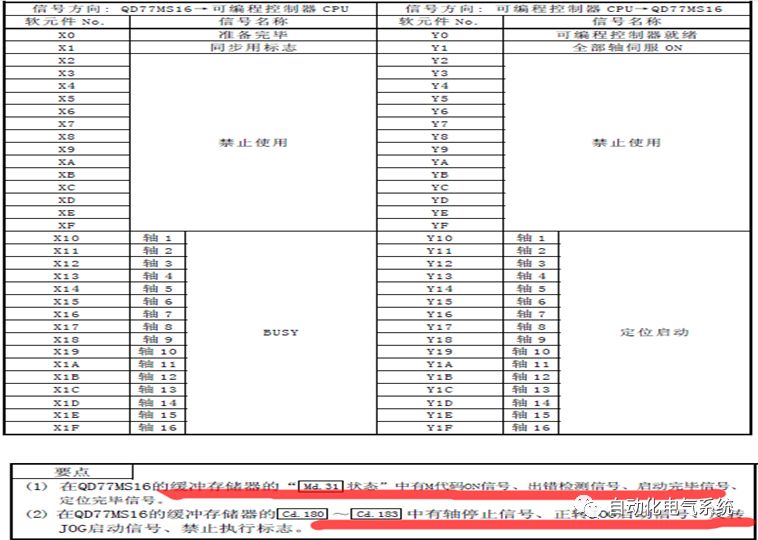
2.5QD77MS與PLC的輸入輸出信號規格
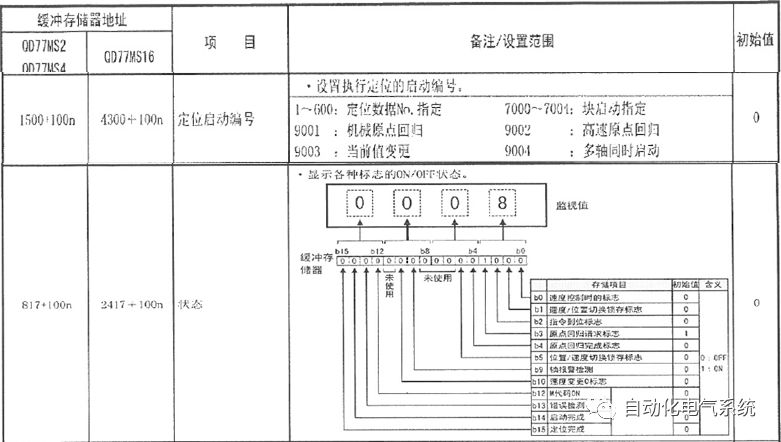
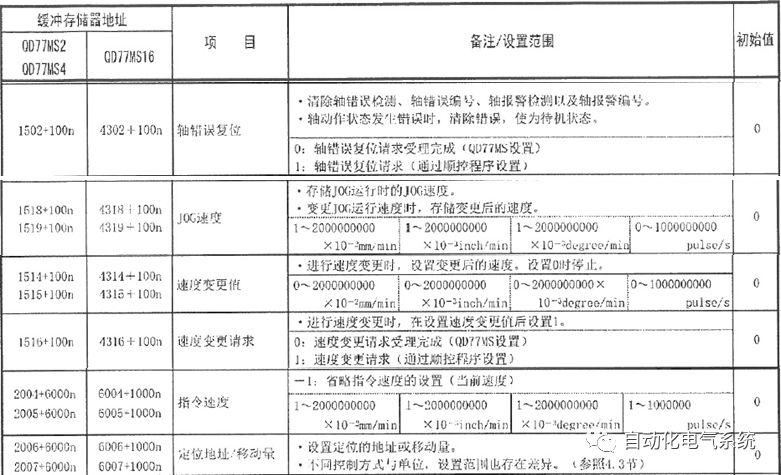
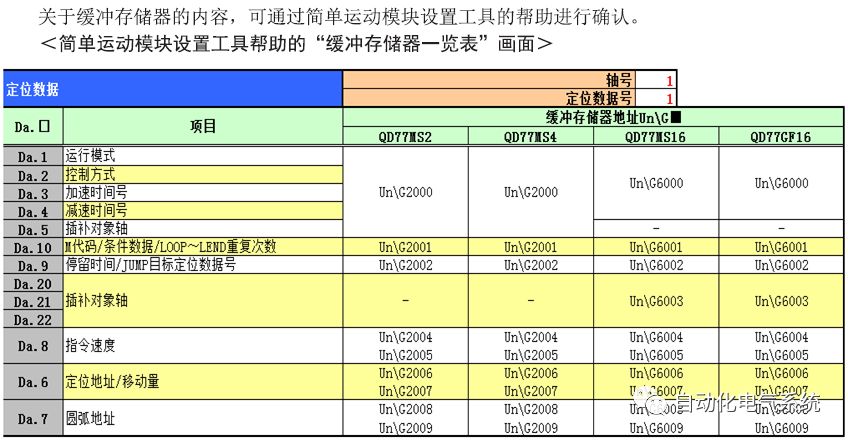
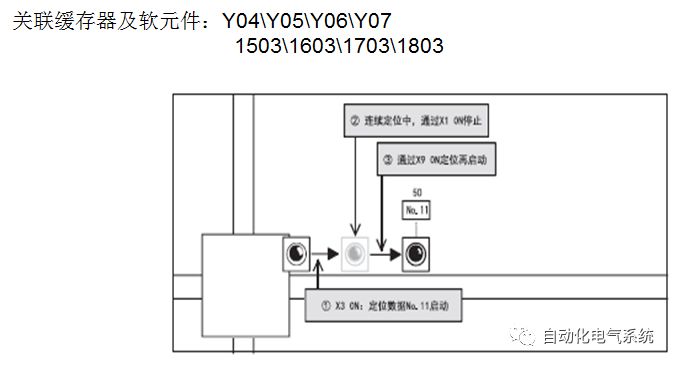
2.6常用的緩沖存儲器
QD77MS中有緩沖存儲器,通過順控程序進行讀取、寫入可實現高級控制,下面介紹常用的緩沖存儲器
3.數據的種類
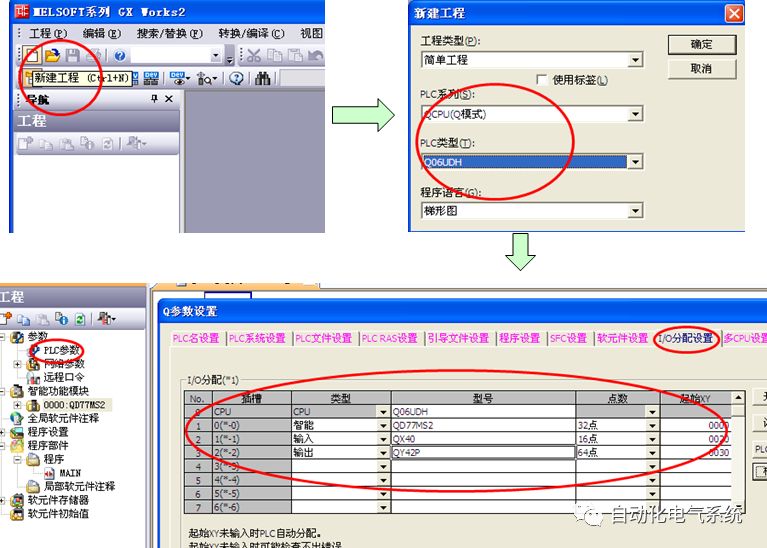
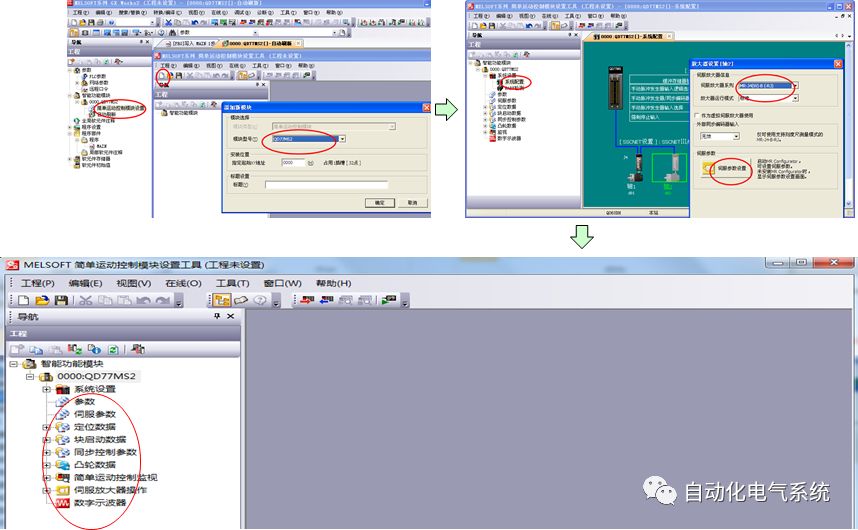
3.1QD77MS項目新建
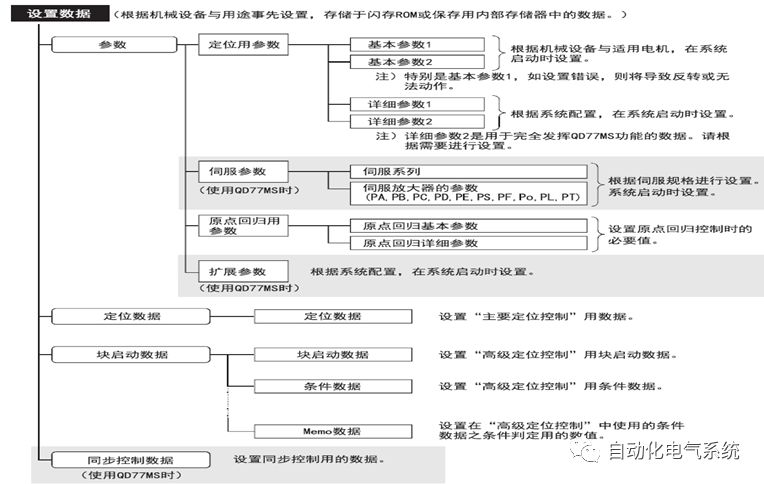
3.2數據的種類
進行使用QD77MS控制時所需參數與數據包括“設置數據”、“監視數據”、“控制數據”三種

3.3QD77MS參數
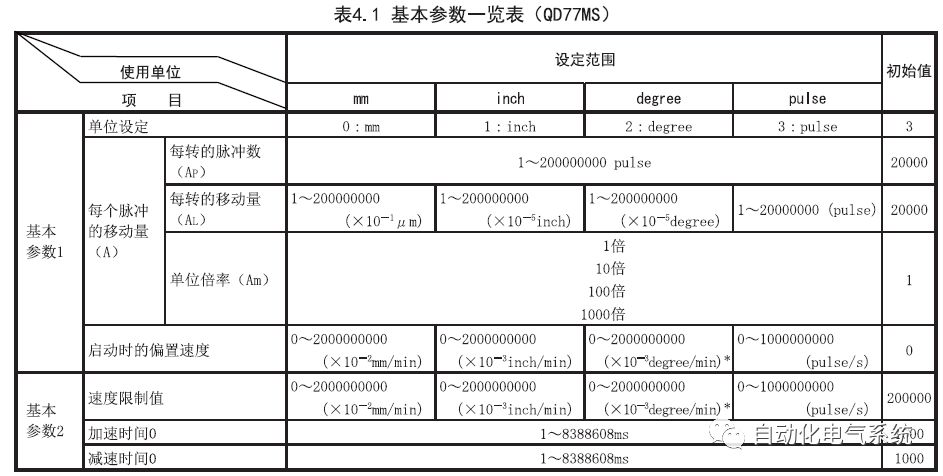
3.3.1基本參數
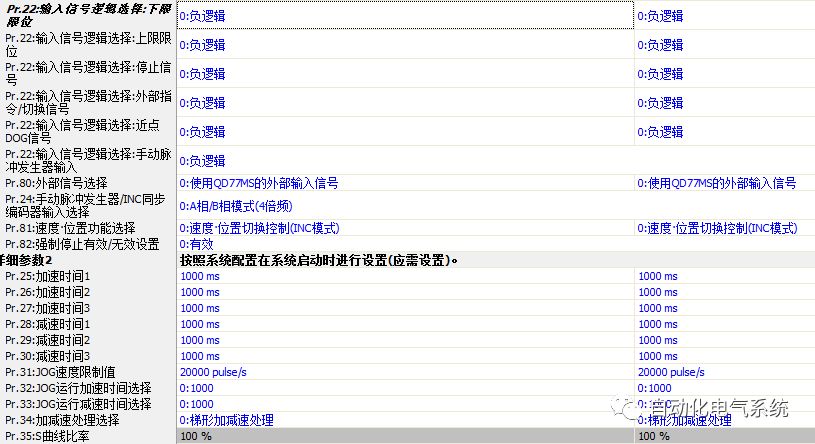
3.3.2詳細參數
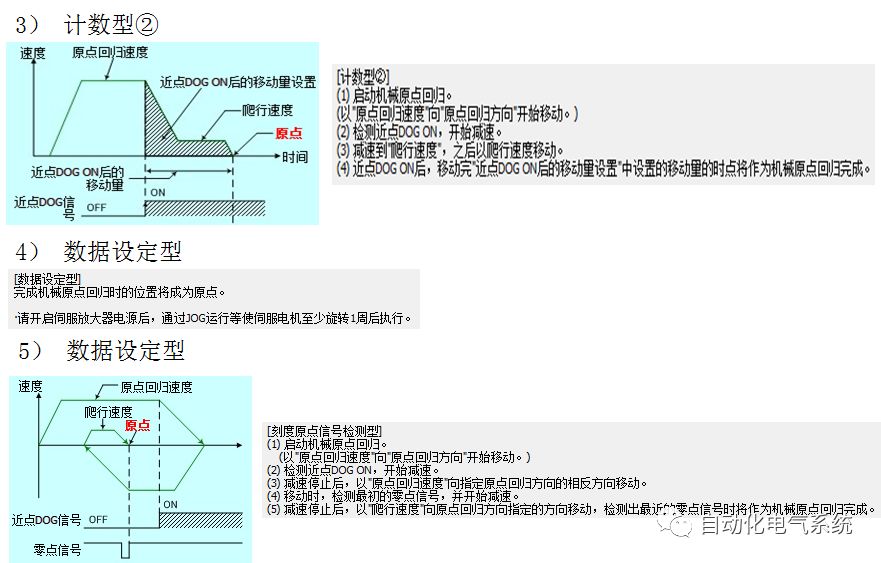
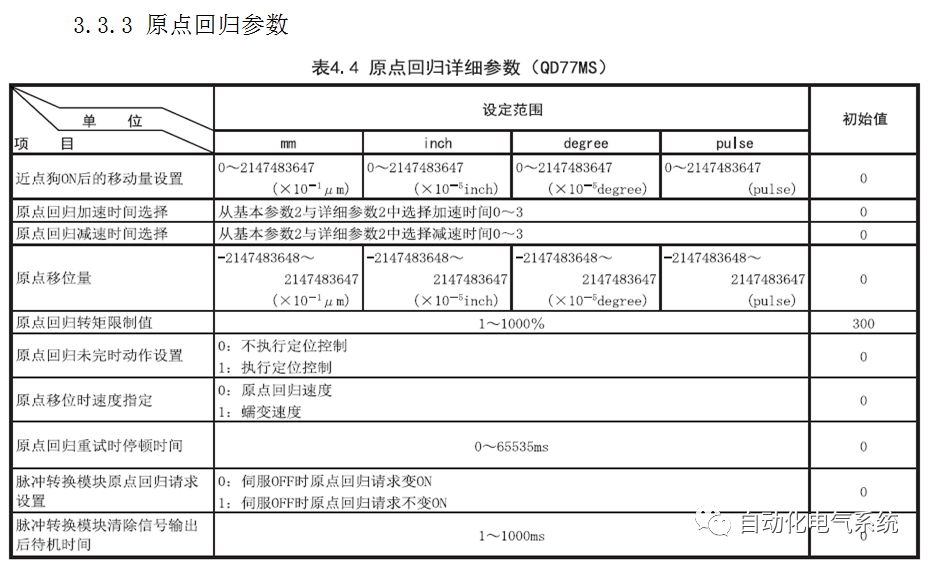
3.3.3原點回歸參數


3.4伺服參數

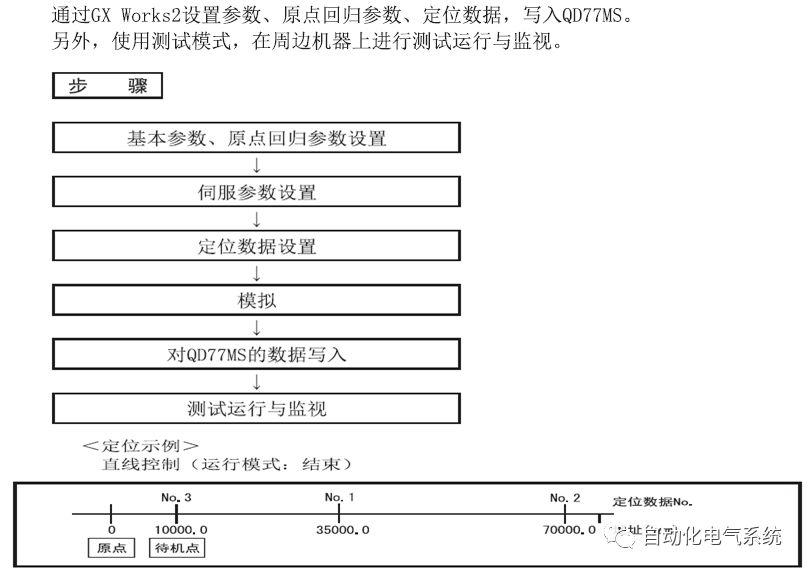
4.通過GX Works2實施測試運行
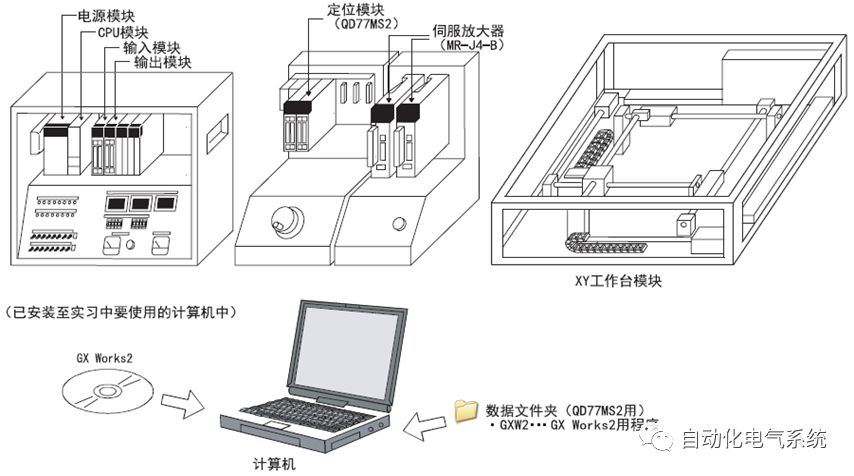
4.1實習設備的系統構成
此次培訓用實習設備由Q系列PLC實習設備,QD77MS簡易運動模塊,MR-J4-B伺服放大器及X-Y工作臺構成
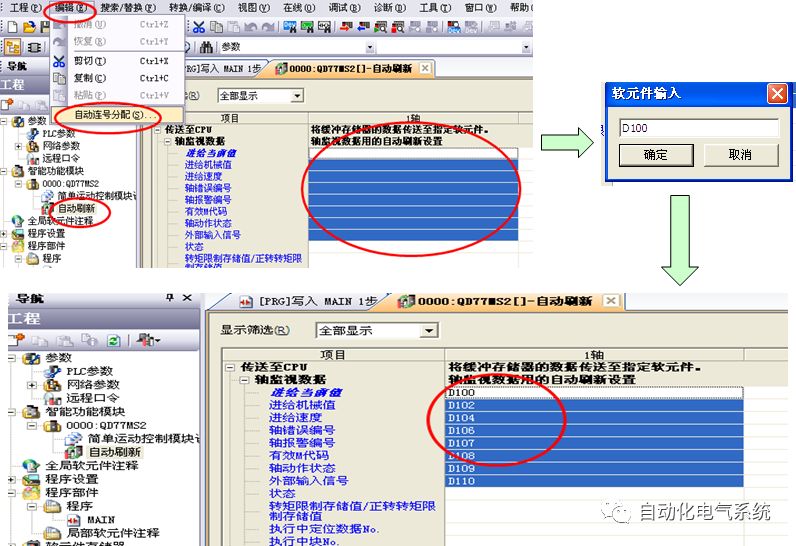
4.2自動刷新的設置
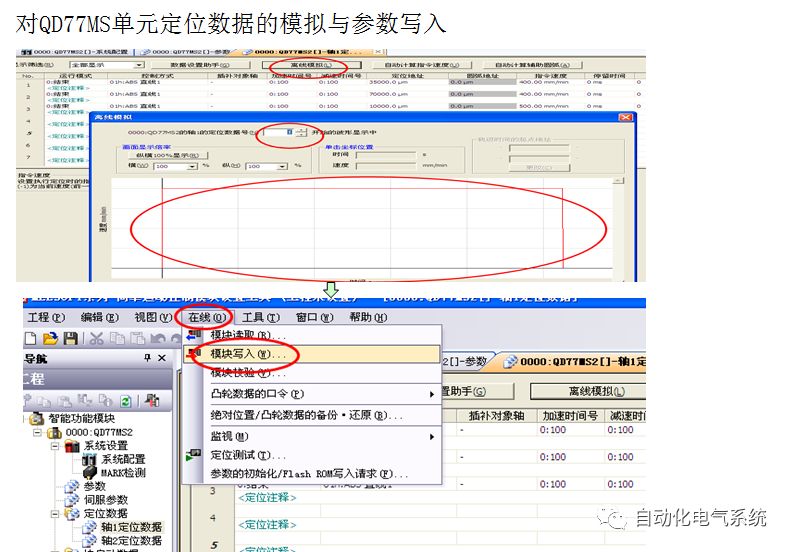
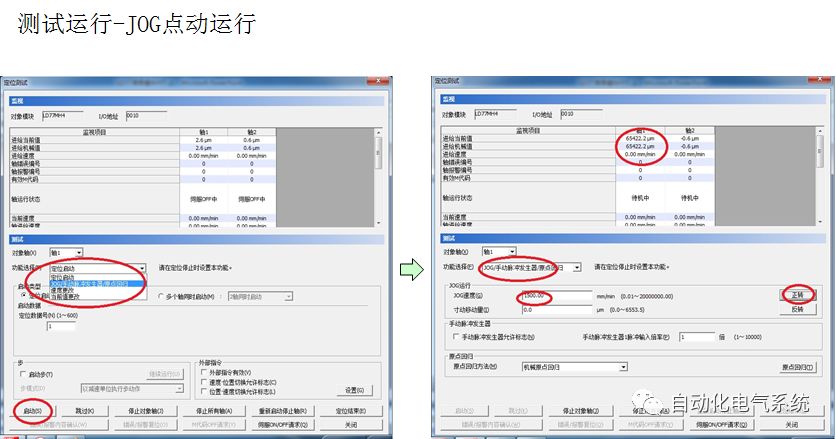
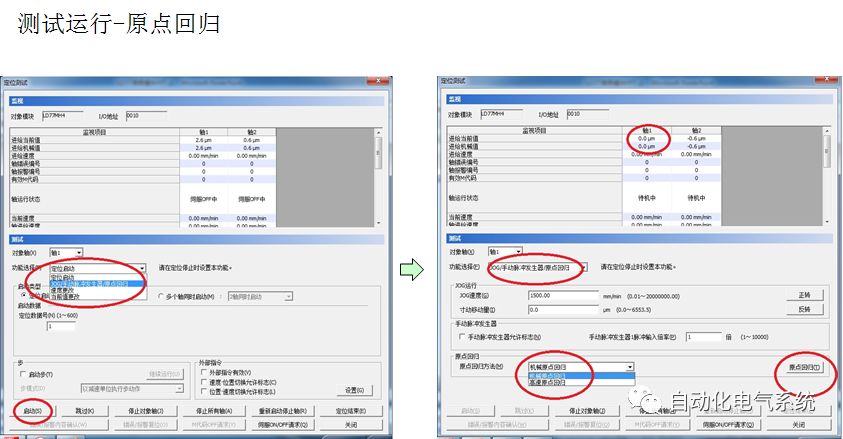
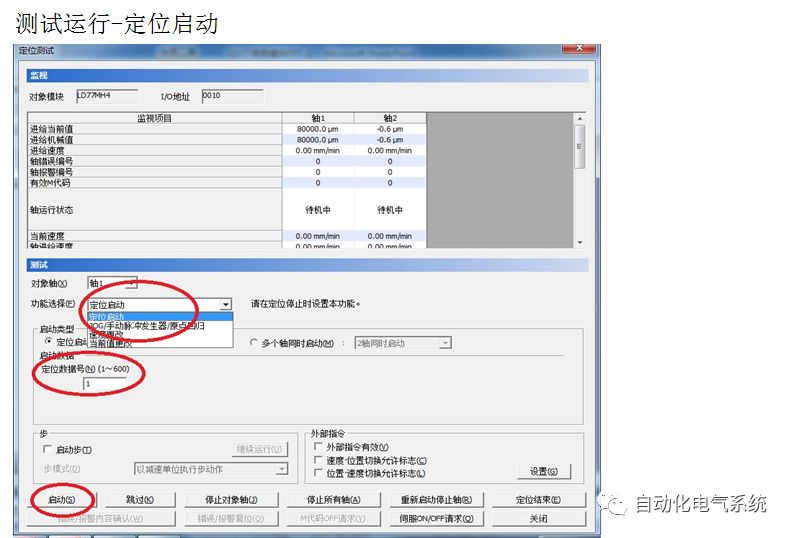
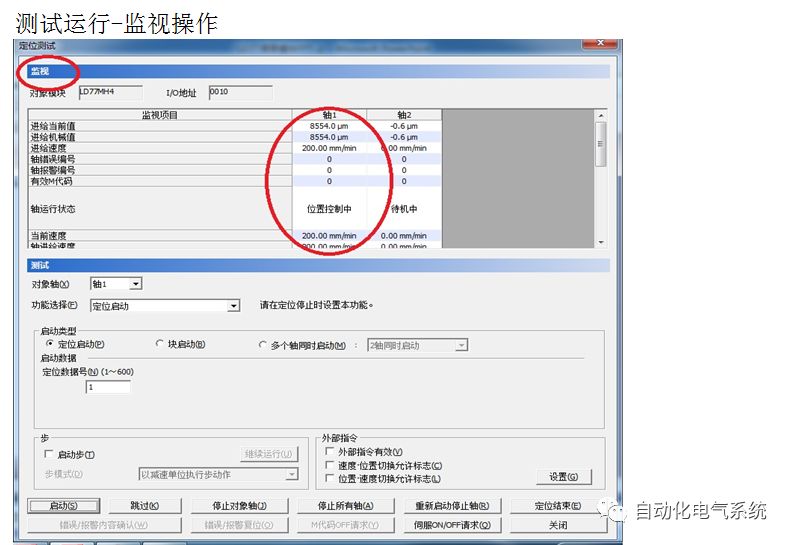
4.3通過GX Works2實施測試運行


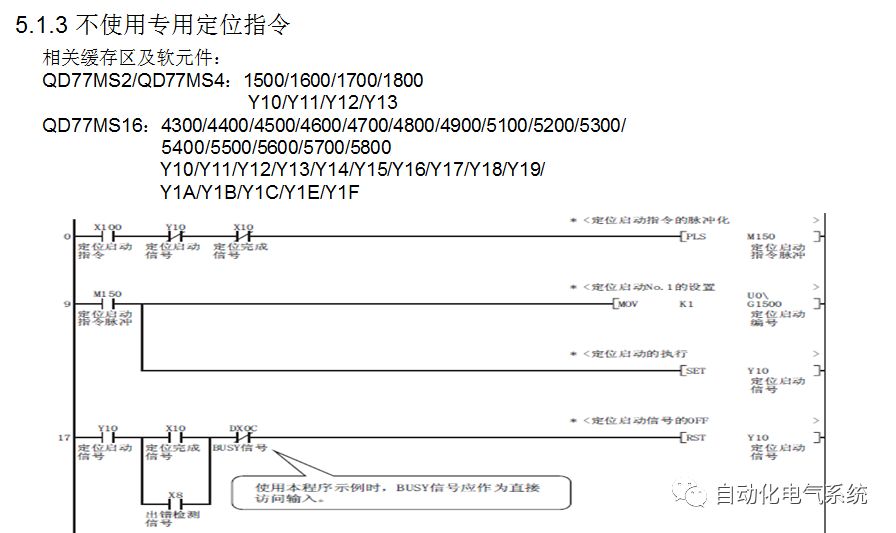
5.通過順控程序實施1軸的定位運行
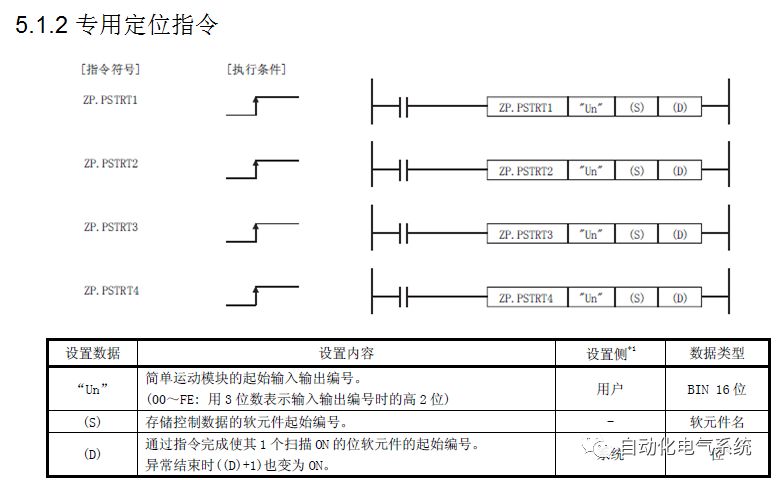
5.1操作指令


5.2手動控制
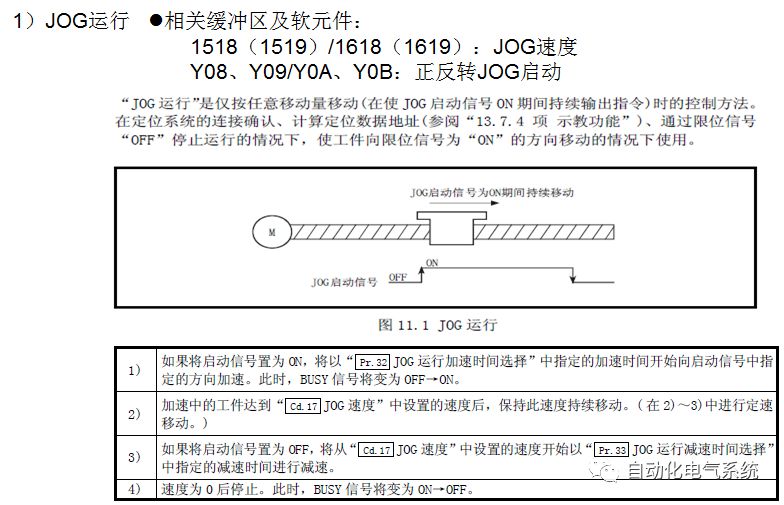
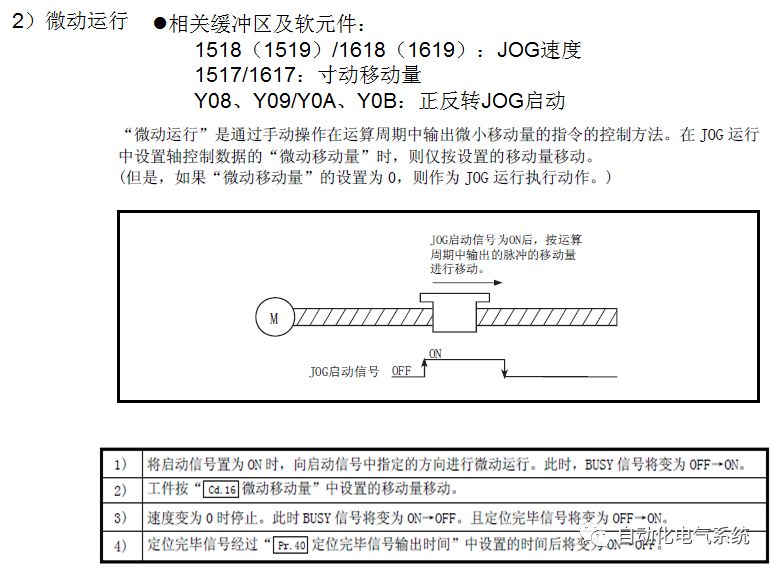
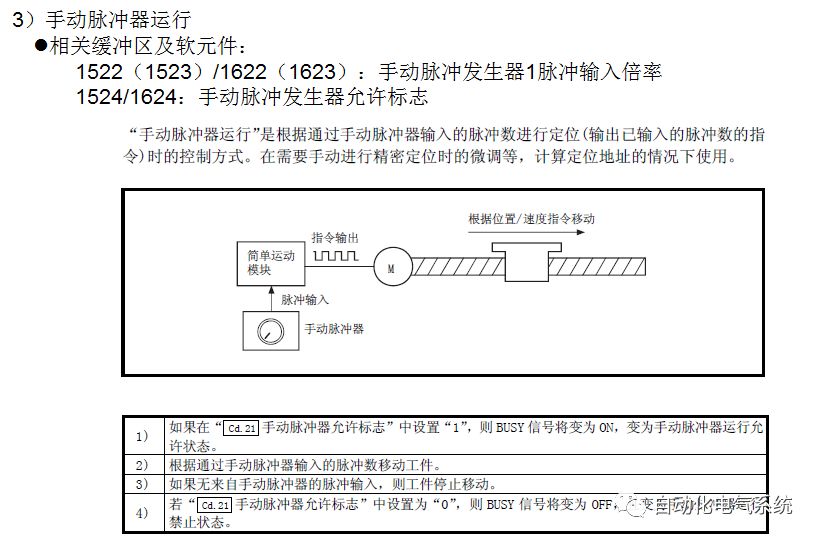
“手動控制”是不使用定位數據,根據來自于外部的信號輸入進行任意定位動作的控制。“手動控制”有JOG運行、微動運行、手動脈沖器運行3種控制方式。
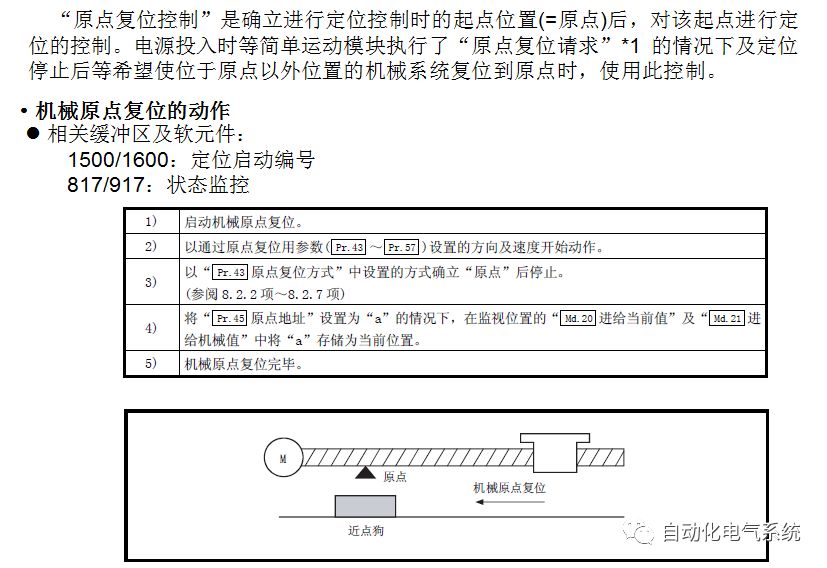
5.3原點復位控制
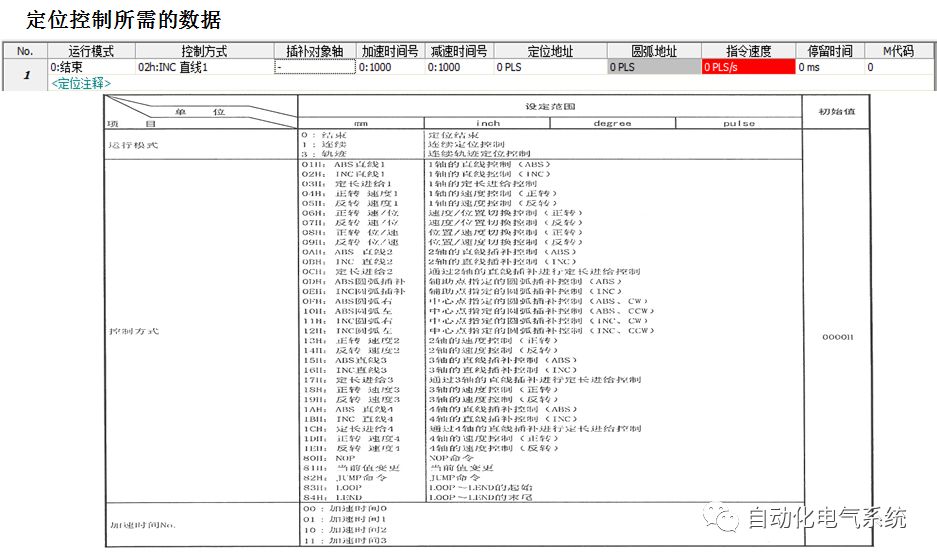
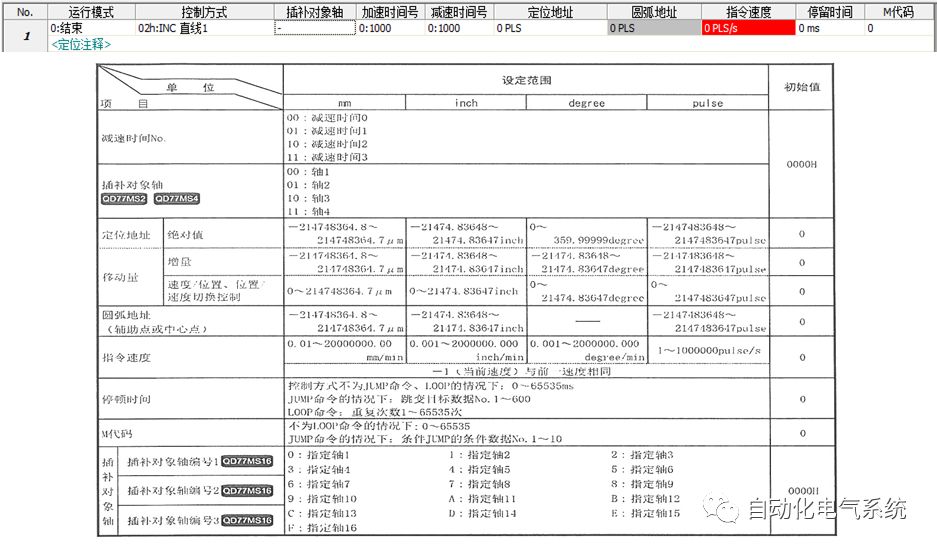
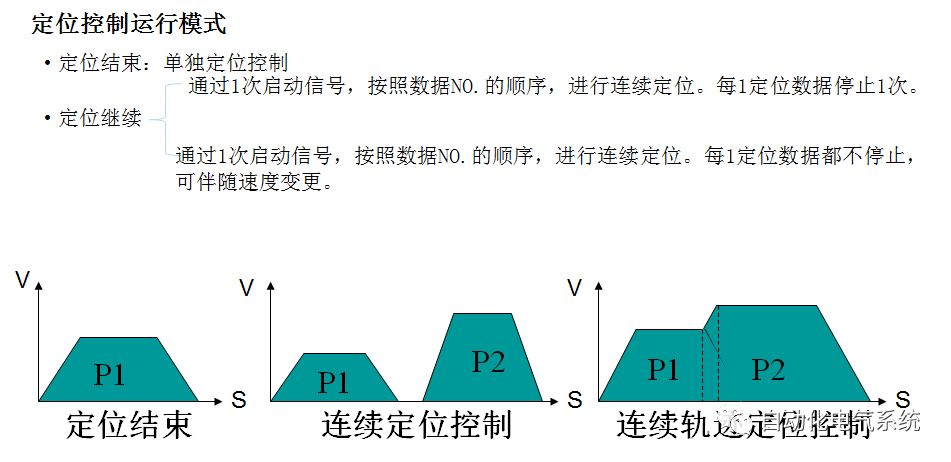
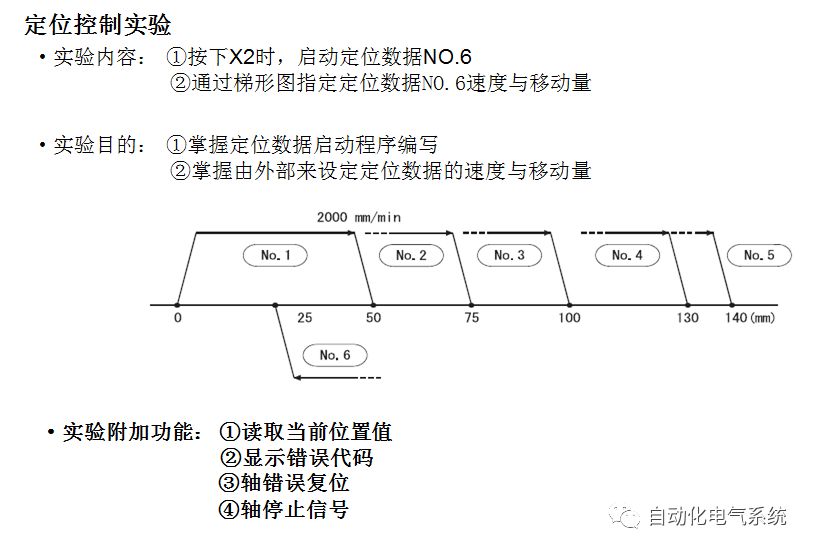
5.4定位控制
1)“定位控制”是使用簡單運動模塊中存儲的“定位數據”進行的控制。
2)位置控制及速度控制等是通過該“定位數據”設置必要的項目后,通過啟動該定位數據執行的。
3)“主要定位控制”的控制方式是在定位數據的設置項目“Da.2控制方式”中設置。
定義為“主要定位控制”的控制是根據“Da.2控制方式”設置進行如下所示的控制。但是,“Da.2控制方式”中設置的速度控制是對伺服放大器的指令中包括位置環路的速度控制。進行不包括位置環路的速度控制時,應使用“速度·轉矩控制”。

黃色:插補控制的插補軸側,因此不可設置
紅色:必須進行設定的項目,未設定或出故障
灰色:無需設定(設置無效)
-:無需設定(設置無效)

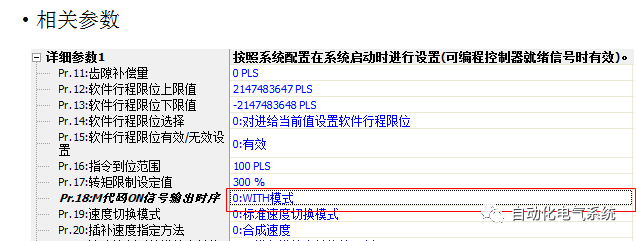
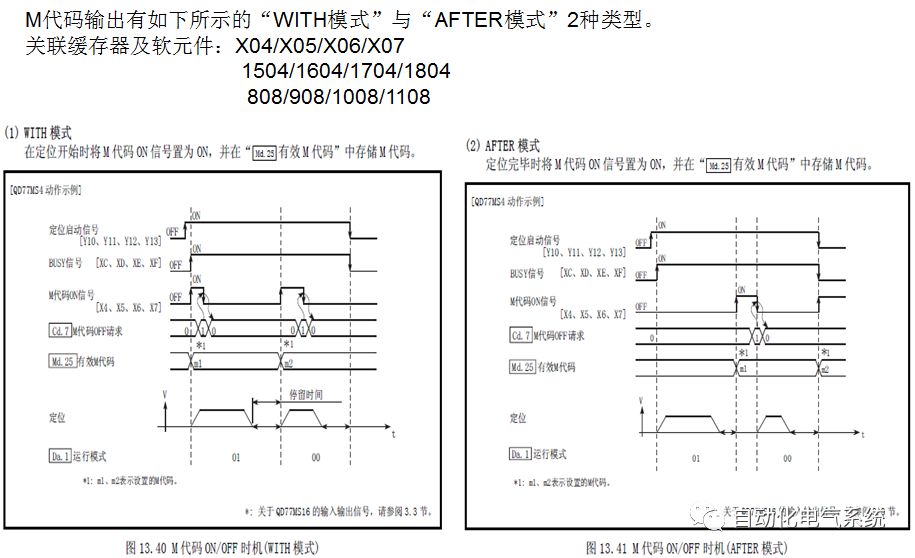
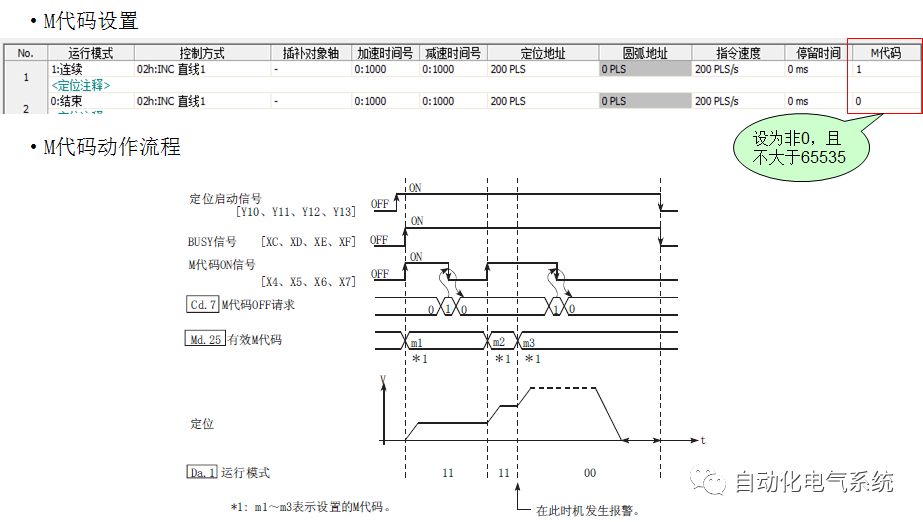
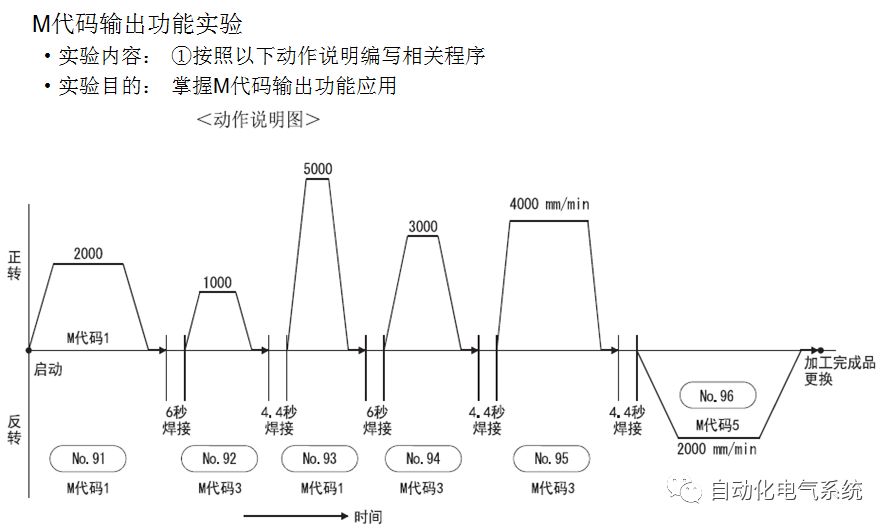
5.5M代碼輸出功能
“M代碼輸出功能”用于執行對應M代碼編號的輔助作業(停止夾緊或鉆孔、更換工具等)
指令的功能。每軸中,M代碼使用0-65535編號,附加到定位數據.
5.6動作暫時停止與再啟動
·暫時停止:通過軸停止信號ON,停止原點復位控制、定位控制、JOG運行、
微動運行、手動脈沖器運行、速度·轉矩控制等。
·重啟指令:由于某種原因在途中停止了定位時(軸動作狀態為“停止中”時),如果在
Cd.6中設置“1”,將從停止位置開始向停止的定位數據的終點再次進行定位。
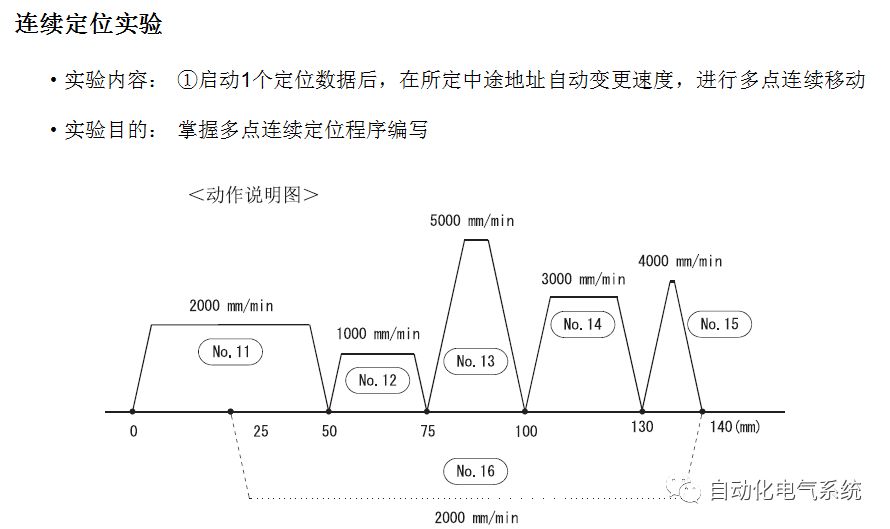
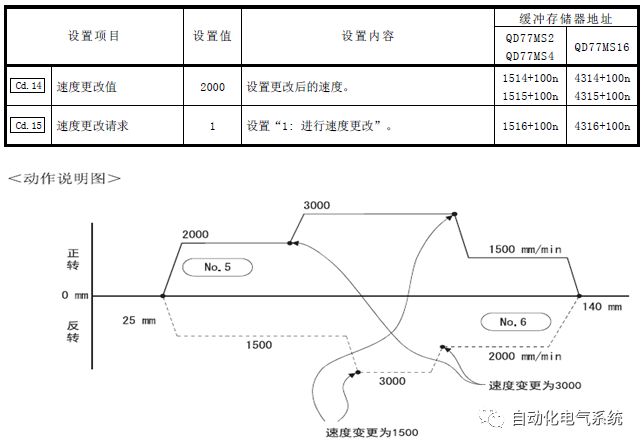
5.7定位控制中的速度更改
“速度更改功能” 是以任意時機將控制中的速度更改為新指定的速度的功能。
更改后的速度直接設置到緩沖存儲器中,并根據速度更改指令( Cd.15速度更改請求)
或者外部指令信號執行速度更改。
5.8定長進給
·在“1軸定長進給控制(“ Da.2控制方式”=定長進給1)中,使用1個電機進行設置的軸
方向的固定長度進給控制。

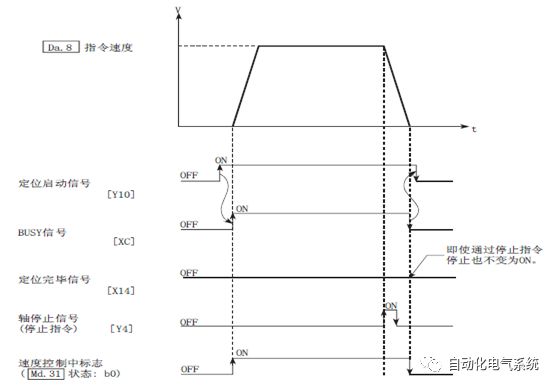
5.9速度控制
用于朝相同方向進行無止境的運行,如傳送帶、輸送機等的控制。
在“1軸速度控制”(“ Da.2控制方式”=正轉速度1、反轉速度1)中,沿著設置了定位數據的軸方向,連續輸出“Da.8指令速度”中設置的速度的脈沖進行控制直至輸入停止指令為止。
1軸速度控制有向正轉方向啟動的“正轉速度1”和向反轉方向啟動的“反轉速度1”2種。
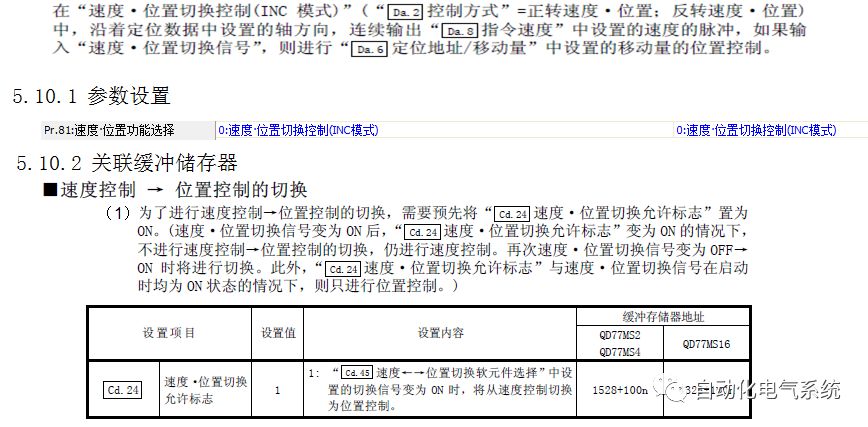
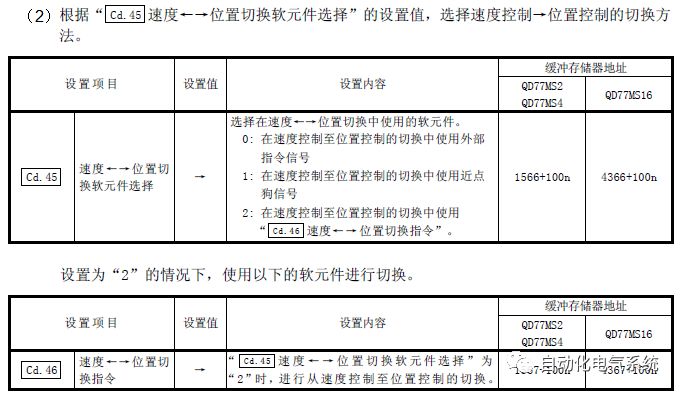
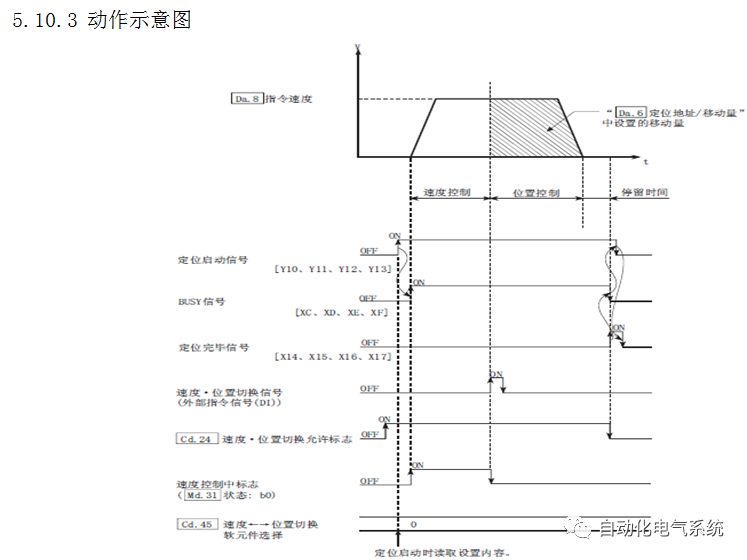
5.10速度·位置切換模式
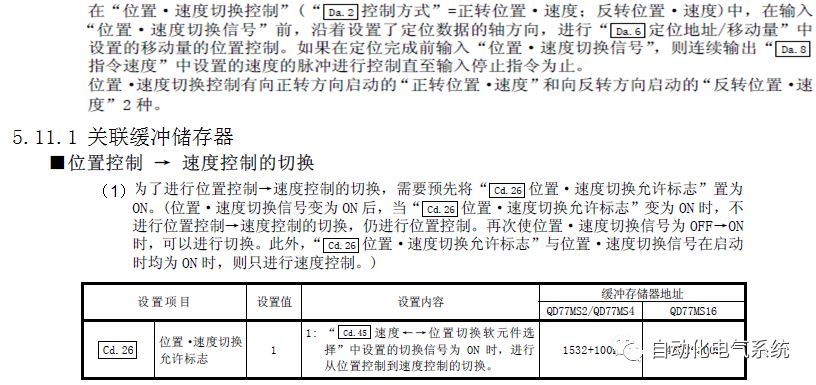
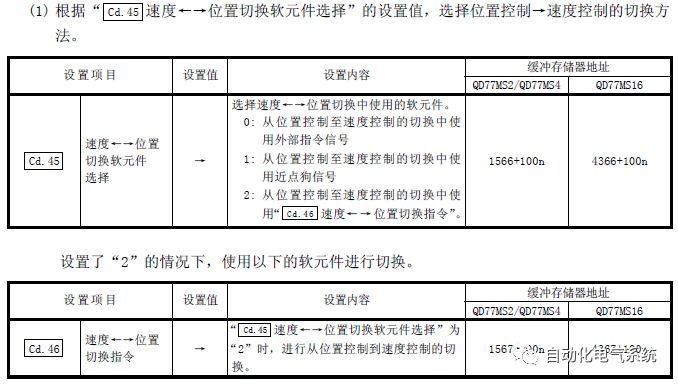
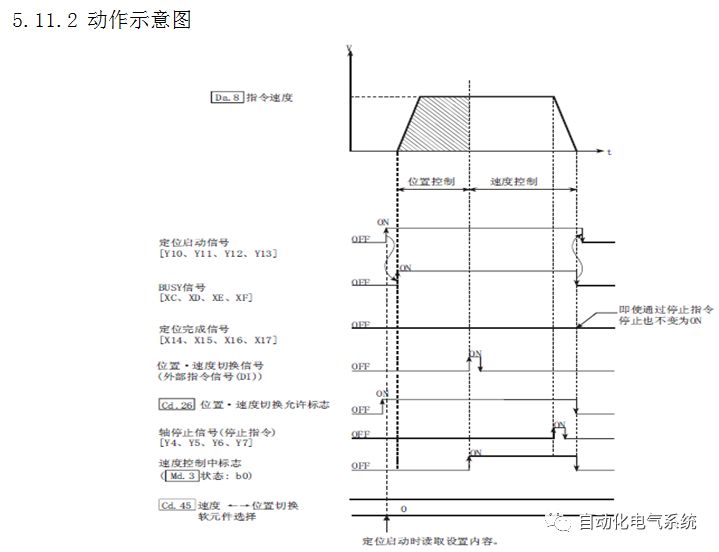
5.11位置·速度切換模式
6. 通過順控程序實施的2軸定位運行
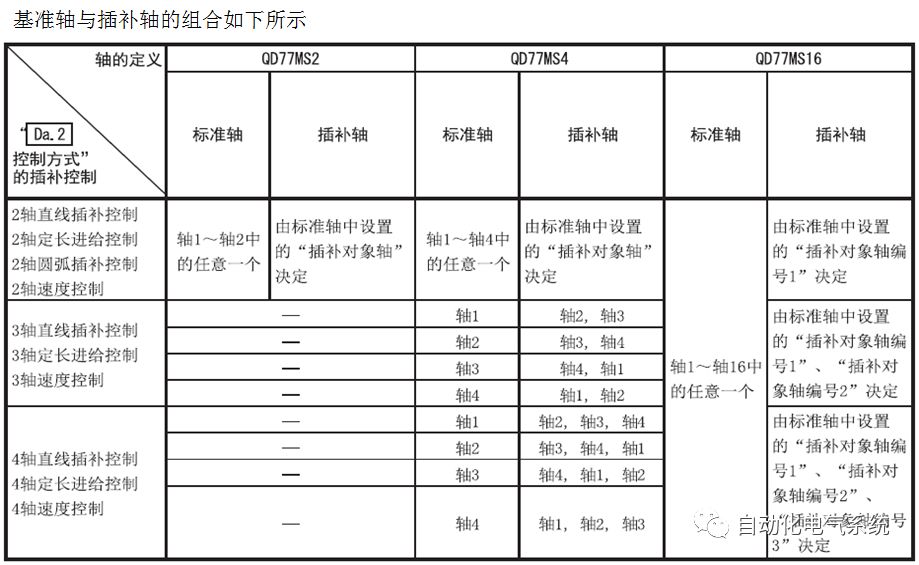
6.1什么是插補控制
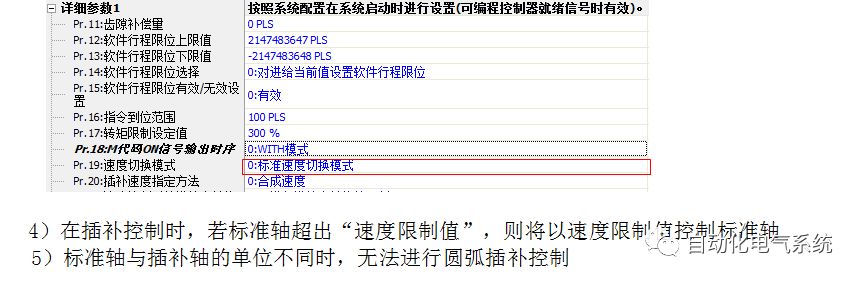
·插補控制注意事項
1)啟動插補控制時,啟動標準軸,無須啟動插補軸
2)當運行模式指定為“連續定位控制”“連續軌跡控制”并進行插補控制時,須在所有的定位數據的控制方式中設置插補控制。
3)插補控制時的速度可指定為“合成速度”或“標準軸速度”中的一個。
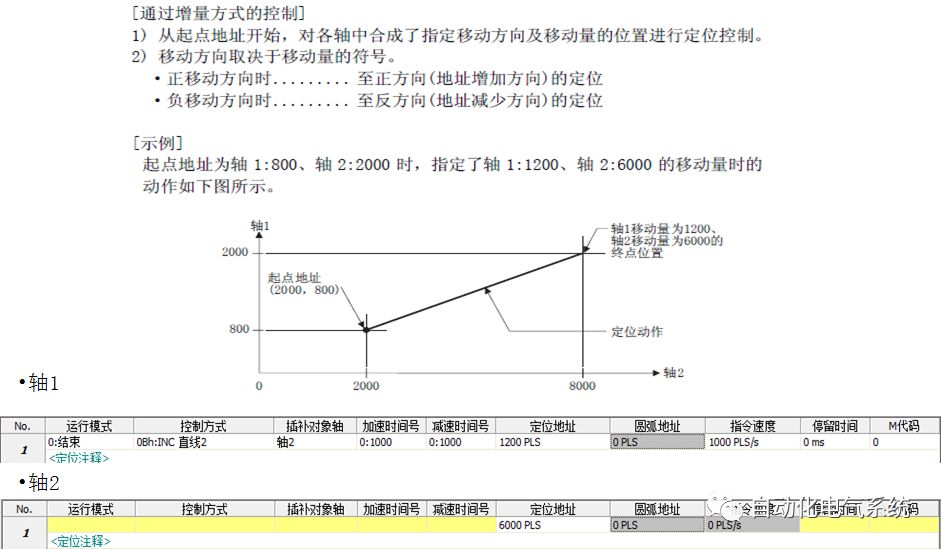
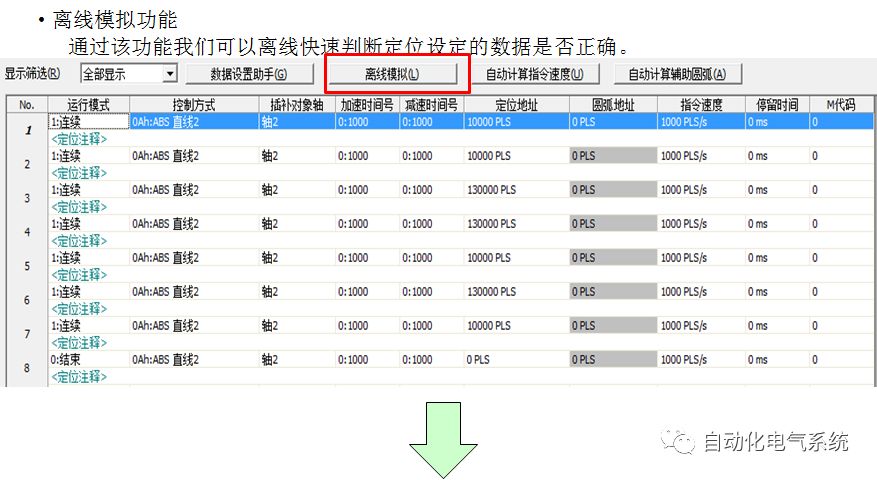
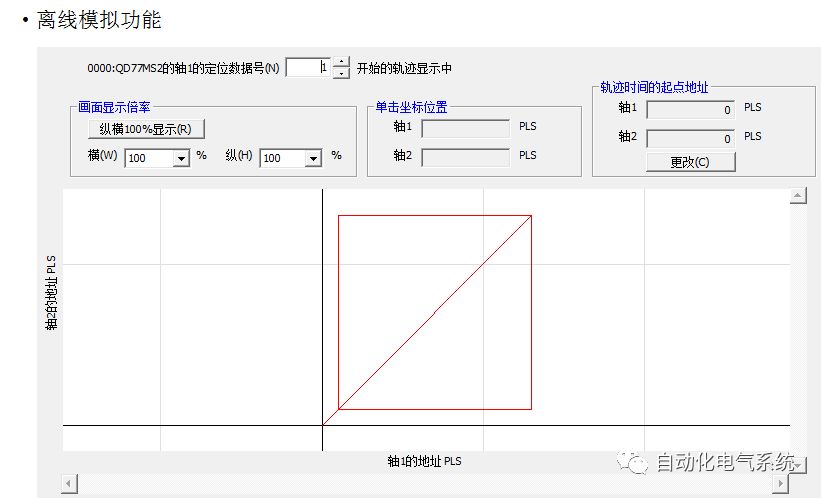
6.2 2軸直線插補控制

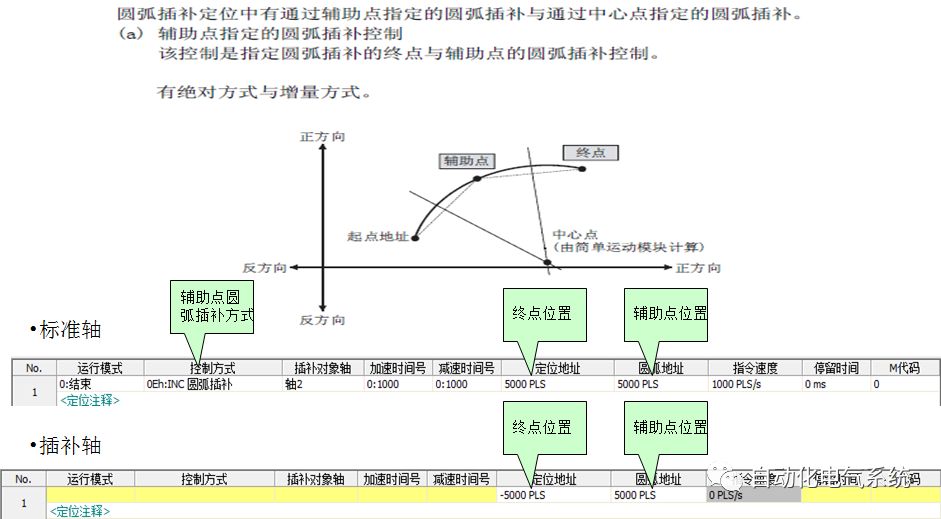
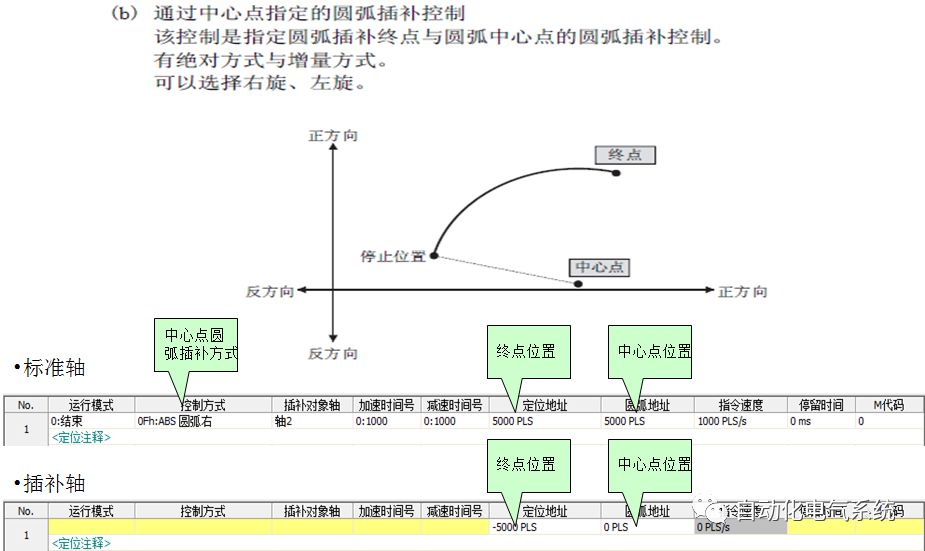
6.3 2軸圓弧插補控制
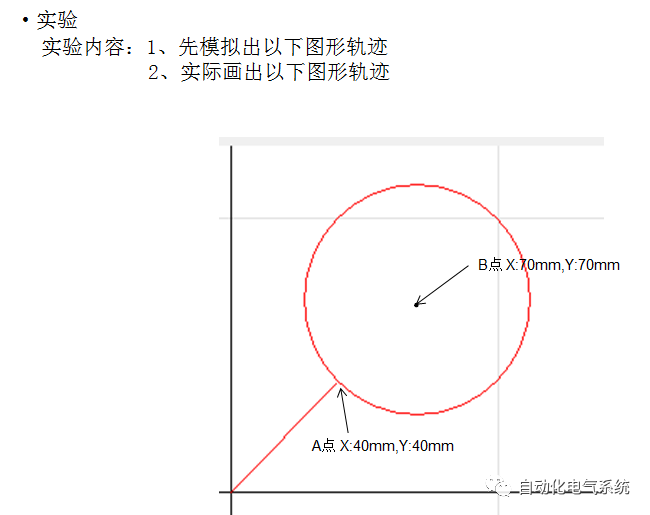
6.4綜合應用
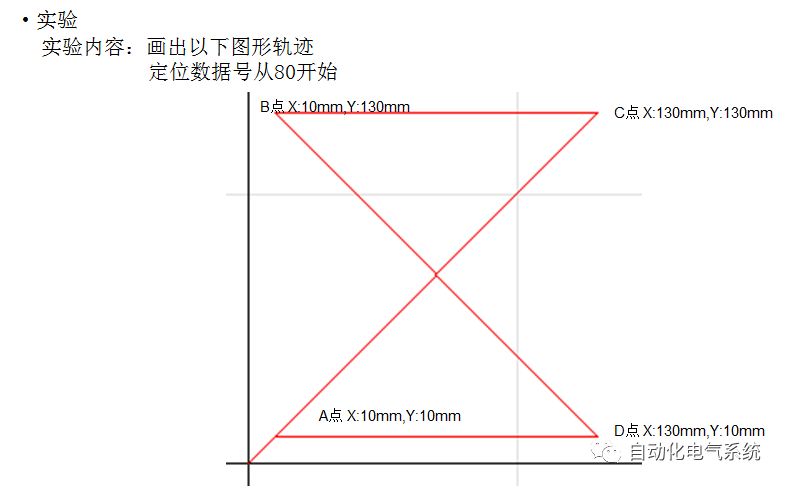
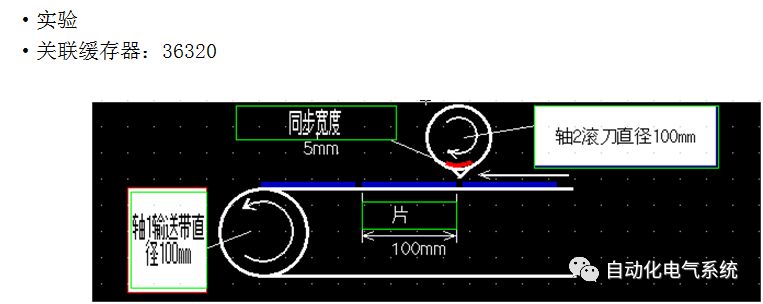
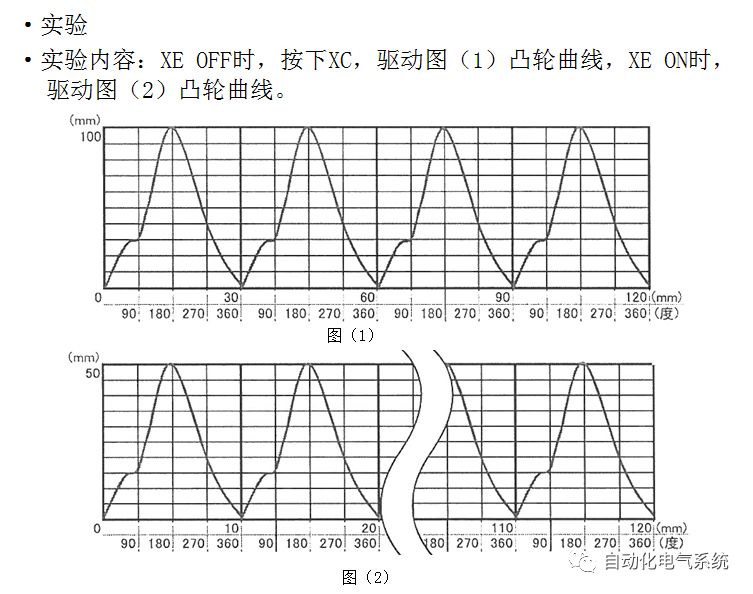
·實驗
實驗內容:畫出以下圖形軌跡
·實驗目的:1)掌握塊啟動
2)綜合掌握直線與圓弧插補應用

7. 通過順控程序實施的同步運
7.1 同步運行定義
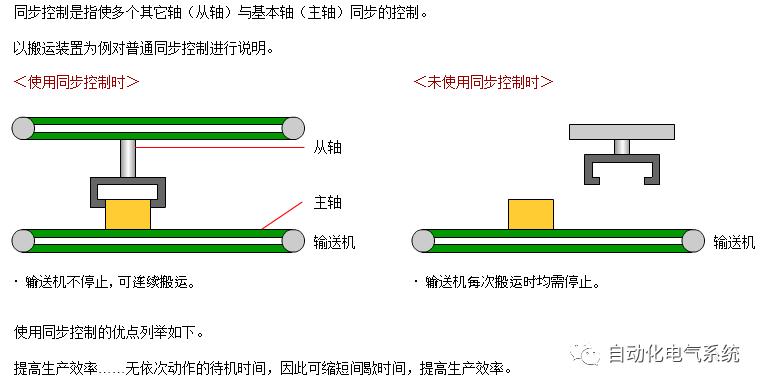
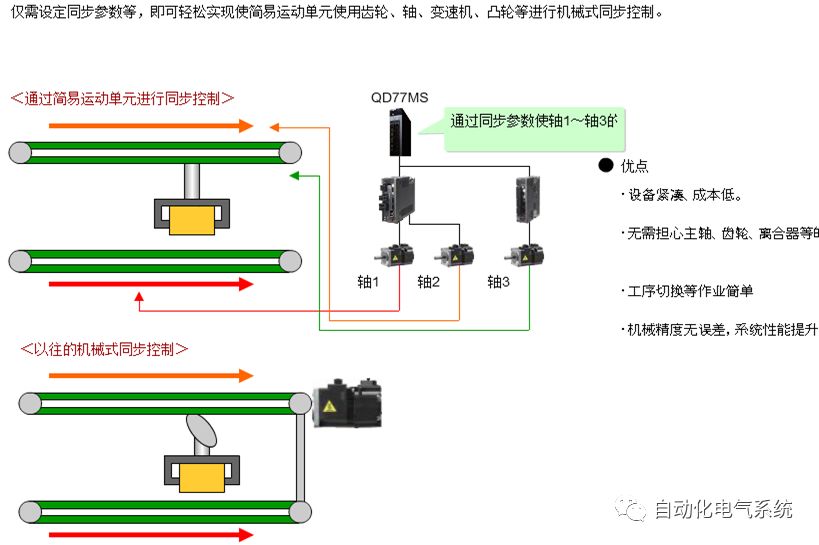
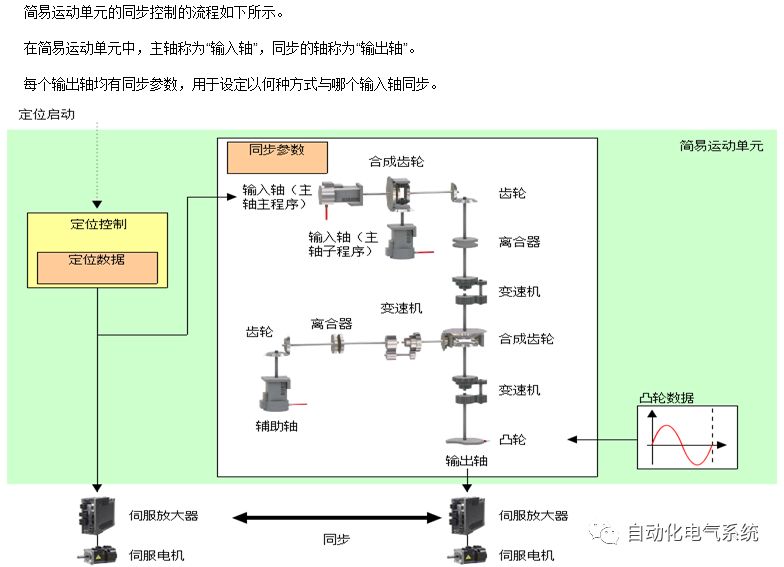
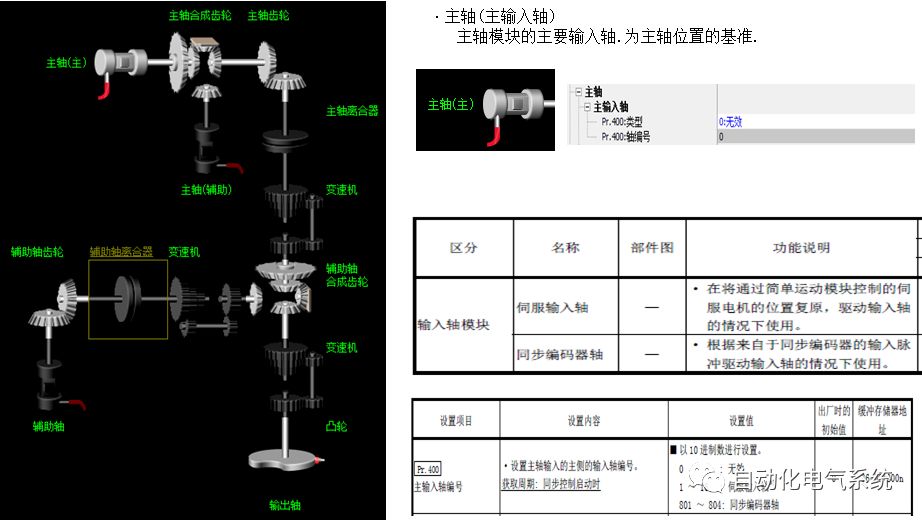
7.2同步控制用模塊介紹

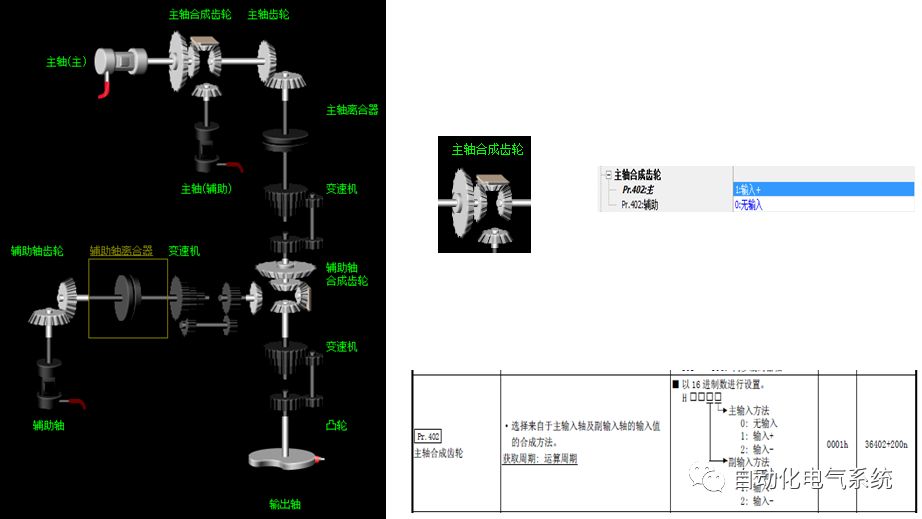
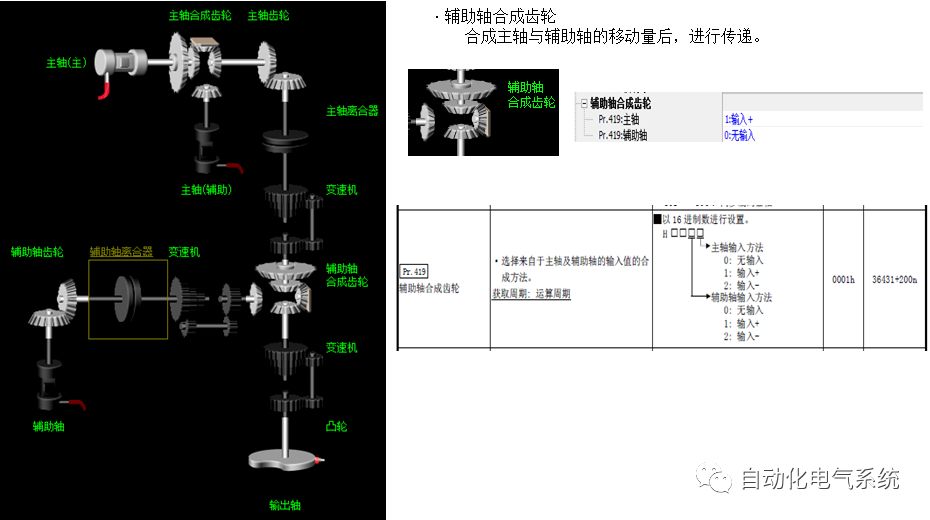
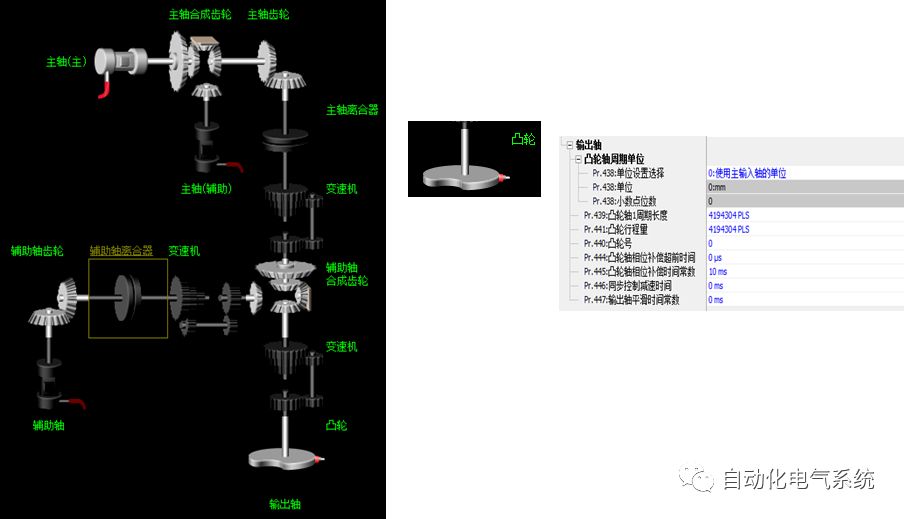


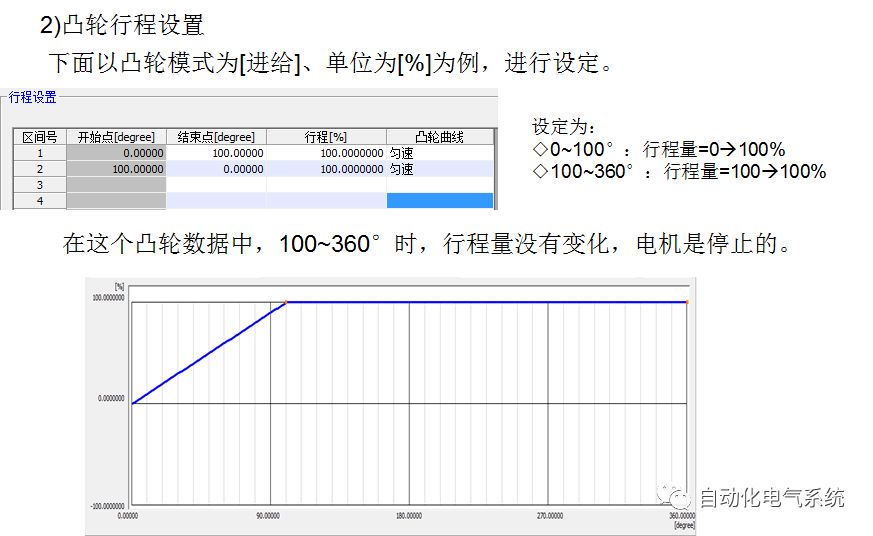
7.3凸輪數據
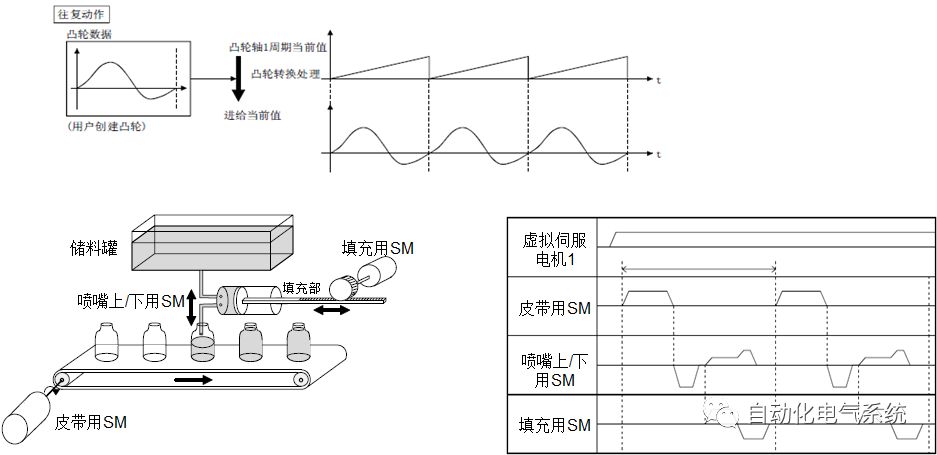
凸輪動作
同步控制的輸出軸作凸輪動作。有往復動作、進給動作、直線動作這三種模式。
·往復動作:在一定的凸輪行程范圍內往復的動作

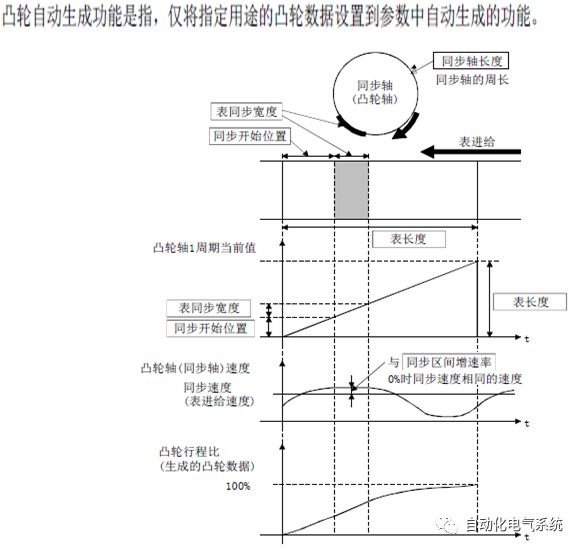
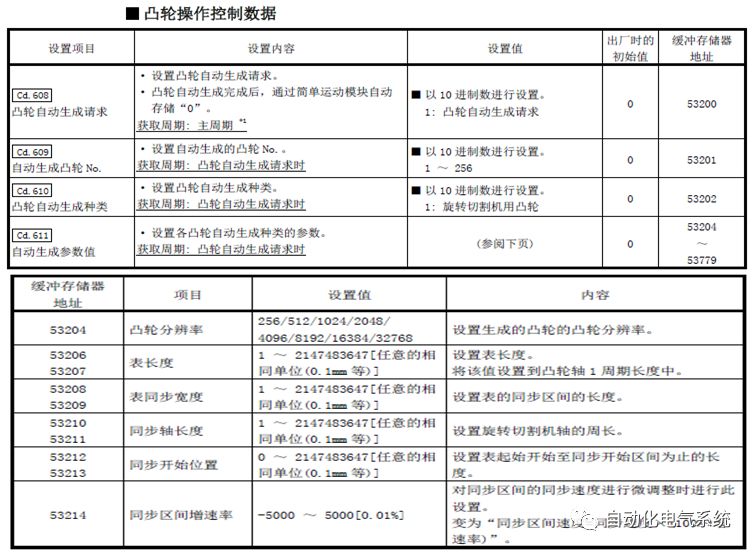
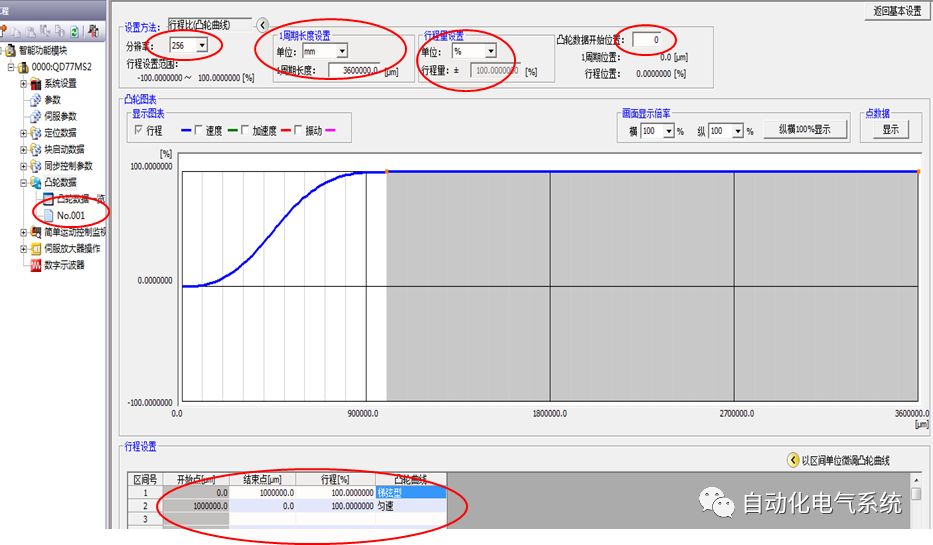
7.4凸輪自動生成功能
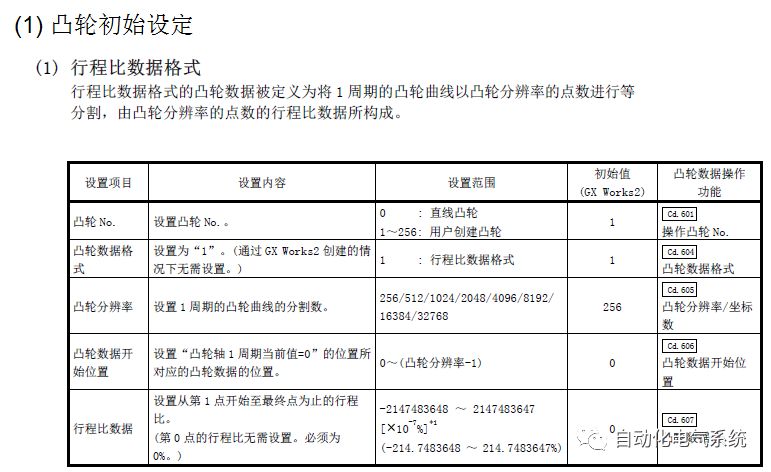
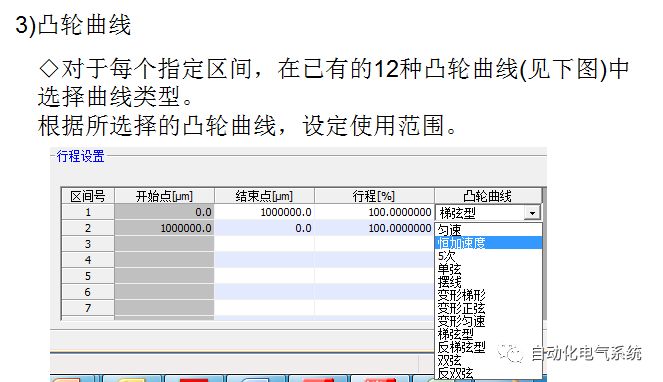
7.5自建凸輪數據
·凸輪數據分成行程比數據格式與坐標數據格式2種。

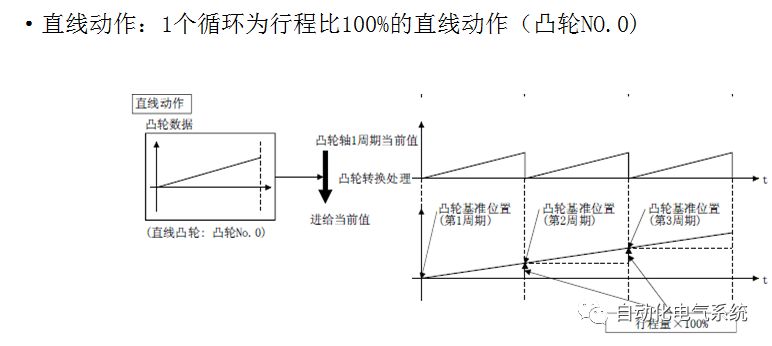
7.6直線動作凸輪數據
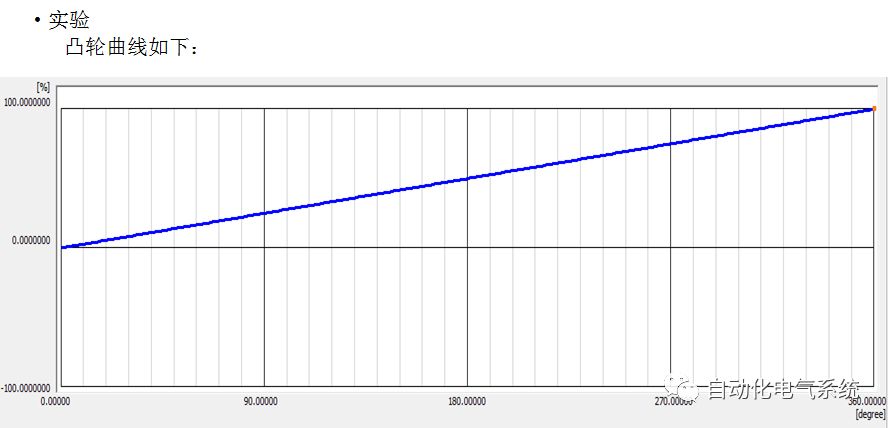
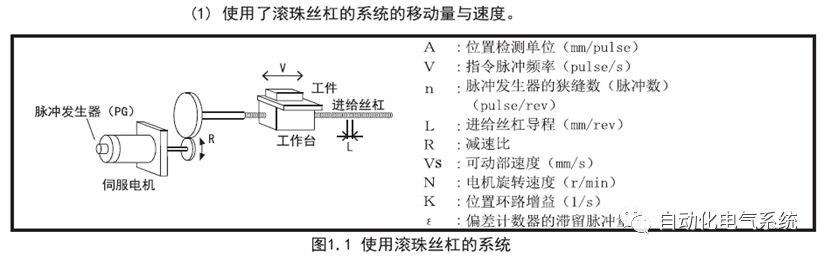
小
-
定位控制
+關注
關注
0文章
26瀏覽量
10344 -
伺服放大器
+關注
關注
3文章
43瀏覽量
13984 -
定位模塊
+關注
關注
0文章
106瀏覽量
16431
原文標題:三菱PLC-QD77定位模塊簡易運動單元應用
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論