") 網(wǎng)格單元在哺乳動物的導(dǎo)航中的重要性
網(wǎng)格單元在哺乳動物的導(dǎo)航中的重要性
深度學(xué)習(xí)可以無需人類幫助擊敗世界上任何一位圍棋選手,還能在幾秒鐘識別人臉,但是直到現(xiàn)在,深度學(xué)習(xí)算法都無法做到一項看似簡單的事情:空間感知。
大多數(shù)動物,包括人類,都能在生活的環(huán)境中靈活地導(dǎo)航,比如探索新領(lǐng)域、快速返回之前的地方或者抄近路。繞過障礙物、記住某個商店、在哪個路口轉(zhuǎn)彎……這些能力對人類來說都非常自然、簡單,以至于我們根本不會意識到完成這一過程有多復(fù)雜。相反,空間導(dǎo)航是智能體面臨的一重要挑戰(zhàn),在這方面它們與動物還相差甚遠(yuǎn)。
當(dāng)大腦思考自己所在的位置時,會動用許多細(xì)胞。例如位置細(xì)胞(place cells),當(dāng)生物體到達(dá)一個特定位置后會激發(fā)這一細(xì)胞。再例如動物頭部的朝向會激發(fā)“head-directioin cells”。
除此之外,空間導(dǎo)航中另一個重要神經(jīng)元就是網(wǎng)格細(xì)胞(grid cell,也稱“網(wǎng)格單元”),這類神經(jīng)元處于大腦中負(fù)責(zé)空間學(xué)習(xí)、空間記憶和通用常識的區(qū)域。2005年,研究人員發(fā)現(xiàn),與其他神經(jīng)元不同,網(wǎng)格神經(jīng)元的形狀是非常完美的六邊形,當(dāng)動物在環(huán)境中來回走動時,該神經(jīng)元被激發(fā),跟蹤并記錄物體移動的軌跡。六邊形組成的網(wǎng)格中的點,被認(rèn)為能夠支持空間導(dǎo)航,類似于地圖上的經(jīng)緯線。另外,這些神經(jīng)元在不斷更新。當(dāng)動物進(jìn)入了一個全新環(huán)境,會重新激活一個相同的網(wǎng)格,適應(yīng)新的環(huán)境。動物除了有內(nèi)部的坐標(biāo)系外,最近研究人員假設(shè),它們的神經(jīng)元(也稱為網(wǎng)格單元)也可以支持基于向量的導(dǎo)航。也就是說,讓大腦計算到目的地的方向和距離,就像“烏鴉飛行”一樣,這可以讓動物在陌生環(huán)境中找到自己合適的路線。
2014年,首次發(fā)現(xiàn)網(wǎng)格細(xì)胞的團隊獲得了諾貝了生理或醫(yī)學(xué)獎,為了表彰他們對空間認(rèn)知表示的貢獻(xiàn)。但是雖然距離網(wǎng)格細(xì)胞的發(fā)現(xiàn)已經(jīng)過去了十多年,網(wǎng)格細(xì)胞的計算功能,以及他們?nèi)绾沃С只谙蛄康膶?dǎo)航,仍然不甚明朗。
而現(xiàn)在,打敗世界最出色的圍棋選手的AI背后的大腦正變得不再神秘,DeepMind的發(fā)現(xiàn)能幫助我們想答案邁進(jìn)一步。
DeepMind的科研專家Andrea Banino說:“我們所想、所記、所感的一切都以某種方式編碼在大腦中。為了理解這一點,我們必須學(xué)習(xí)如何研究神經(jīng)元,如何測量它們的活動,以及將這些活動與我們的行為聯(lián)系在一起。然而,這在真實的大腦上是很難實現(xiàn)的。”
而DeepMind做到了,不過不是在真的大腦上做實驗,而是利用神經(jīng)網(wǎng)絡(luò)和受大腦神經(jīng)元啟發(fā)構(gòu)建的算法,來解釋了這一問題。在DeepMind最近發(fā)表在Nature的論文中,他們開發(fā)了一個智能體,用于測試網(wǎng)格細(xì)胞支持基于向量的導(dǎo)航的理論,“這與我們的重要理念相符合,即用于AI的算法與大腦中的元素十分相似,”研究人員表示。

第一步,DeepMind訓(xùn)練了一個循環(huán)網(wǎng)絡(luò)(RNN),讓其利用與動作相關(guān)的主要的速度信號,在一個虛擬環(huán)境中對自己定位。這種能力通常出現(xiàn)在哺乳動物走到一個陌生環(huán)境中或不容易發(fā)現(xiàn)明顯地標(biāo)的情況下才會出現(xiàn)(例如在黑暗中導(dǎo)航)。
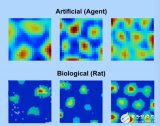
他們發(fā)現(xiàn),網(wǎng)格狀的表示(下文稱“網(wǎng)格單元”表示)會在網(wǎng)絡(luò)中自發(fā)生成,這與正在覓食的哺乳動物中所觀察到的神經(jīng)活動模式十分相似,并且符合網(wǎng)格細(xì)胞為空間提供有效代碼的觀點。

在他們的實驗中,智能體生成了網(wǎng)格狀的表示:網(wǎng)格單元,它與哺乳動物覓食時的生物網(wǎng)格細(xì)胞非常像
接下來,研究人員測試了網(wǎng)格單元是否能夠通過創(chuàng)造智能體來支持基于向量的導(dǎo)航的理論。他們把該智能體看作虛擬的小鼠。通過將初始的“網(wǎng)格網(wǎng)絡(luò)”和更大的網(wǎng)絡(luò)架構(gòu)結(jié)合,形成了一個可以用深度強化學(xué)習(xí)訓(xùn)練的智能體,而它的目標(biāo)是在虛擬現(xiàn)實的游戲環(huán)境中進(jìn)行導(dǎo)航。研究人員發(fā)現(xiàn),當(dāng)它開始尋找自己的位置時,網(wǎng)格狀的形狀在網(wǎng)絡(luò)中開始形成。某些節(jié)點比其他節(jié)點用的更頻繁,這與真實動物在尋找方向是生成的網(wǎng)格單元形狀非常相似。
該智能體的表現(xiàn)超越了人類,比職業(yè)游戲玩家還要出色,并且展示了動物身上才有的靈活導(dǎo)航行為,能夠在必要時刻開辟新的路徑,甚至“抄近道”。
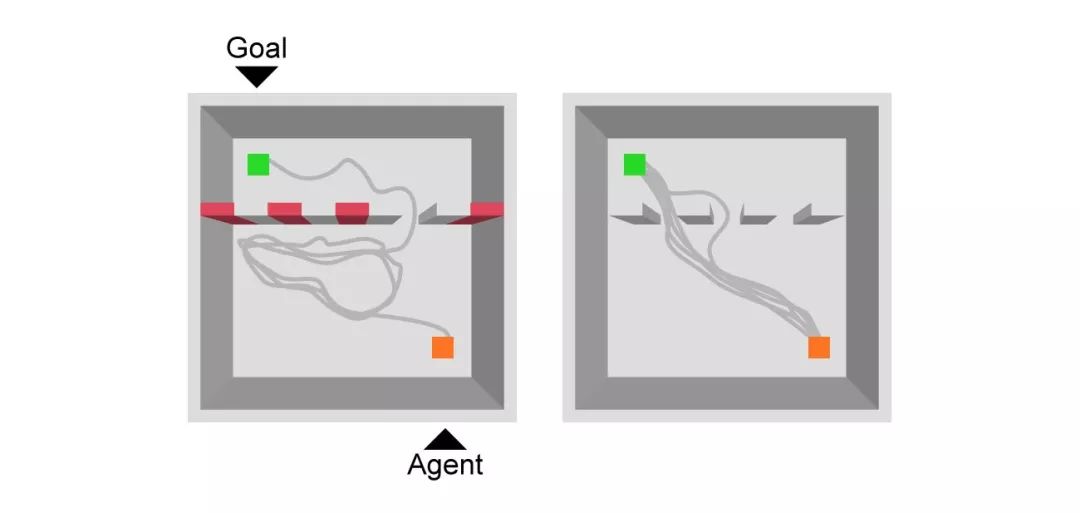
通過一系列實驗,我們證明了網(wǎng)格狀的表示對基于向量的導(dǎo)航十分重要。例如,當(dāng)網(wǎng)絡(luò)中的網(wǎng)格單元消失,智能體導(dǎo)航的功能也就減弱了,同時關(guān)鍵指標(biāo)(到目標(biāo)的距離和方向)也變得不準(zhǔn)確了。

用網(wǎng)格單元進(jìn)行向量導(dǎo)航的演示。底部圓點代表三種不同尺寸的網(wǎng)格單元。當(dāng)智能體移動時,網(wǎng)格單元就會被激活,代表這當(dāng)前的網(wǎng)格代碼,從而發(fā)生變化,反應(yīng)智能體進(jìn)入了不同的領(lǐng)域。網(wǎng)格單元用于計算到達(dá)目標(biāo)的最短距離
DeepMind的CEO,Demis Hassabis表示:“人類大腦是唯一能證明我們是能夠創(chuàng)造強人工智能的證據(jù),所以將神經(jīng)科學(xué)看成是算法新的靈感是完全可行的。但是我們認(rèn)為這種靈感應(yīng)該是雙向的,既能對人工智能有所啟發(fā),也能對神經(jīng)科學(xué)界未解決的問題提供幫助。這項工作就是很好的證明:通過創(chuàng)建一個能在復(fù)雜環(huán)境中導(dǎo)航的智能體,我們證明了網(wǎng)格單元在哺乳動物的導(dǎo)航中的重要性,并加深了對它的理解。”
研究團隊認(rèn)為,這項研究對于了解大腦中的網(wǎng)格單元的基本計算目的是很重要的,同時也表明它們對智能體的幫助也是很大的。實驗的結(jié)果為網(wǎng)格單元能提供一個歐幾里得空間框架的理論提供了支持,這一概念支持了基于向量的導(dǎo)航。
更廣泛地講,這項研究重新確認(rèn)了大腦所用的算法能為機器學(xué)習(xí)架構(gòu)提供參考。此前神經(jīng)科學(xué)對網(wǎng)格單元的研究讓智能體的可解釋性變得更加容易,這本身就是人工智能研究中的主要話題,當(dāng)他們試著想要理解它的內(nèi)部表示,先前的研究可以給與參考。這項工作同樣展示了利用智能體在虛擬復(fù)雜環(huán)境中的行為驗證大腦如何工作的潛力。
長遠(yuǎn)來看,這樣類似的方法還能用來檢測大腦的某一區(qū)域,例如負(fù)責(zé)捕捉聲音或控制肢體的地方。未來,這類網(wǎng)絡(luò)也許能像科學(xué)家提供不一樣的試驗方法,或者提出新的理論,甚至完成目前只能在小動物身上做的實驗。
-
AI
+關(guān)注
關(guān)注
87文章
31536瀏覽量
270343 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5516瀏覽量
121553
原文標(biāo)題:DeepMind用AI解密大腦:當(dāng)你找路時,大腦里發(fā)生了什么
文章出處:【微信號:jqr_AI,微信公眾號:論智】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
通過大小鼠無創(chuàng)血壓測量實驗明白了無創(chuàng)血壓測量技術(shù)的重要性
一種新的粒子濾波算法在INS/GPS組合導(dǎo)航系統(tǒng)中的應(yīng)用
基準(zhǔn)源設(shè)計的重要性
Syncer模塊的重要性是什么?
論調(diào)節(jié)閥的重要性
電磁勢在量子理論中的重要性
ESD標(biāo)準(zhǔn)在汽車電子設(shè)計中的重要性
deepmind訓(xùn)練出人腦模式AI 學(xué)會像哺乳動物那樣抄近路





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論