") 深入分析自動駕駛系統(tǒng)以及涉及到的軟件系統(tǒng)
深入分析自動駕駛系統(tǒng)以及涉及到的軟件系統(tǒng)
本文將深入分析自動駕駛系統(tǒng)以及涉及到的軟件系統(tǒng)、硬件以及相關(guān)的企業(yè)的情況和產(chǎn)業(yè)的進(jìn)展。
控制系統(tǒng)是智能汽車的大腦,它收集來自感知層的大量傳感器的信息,將其處理分析,感知周圍環(huán)境,規(guī)劃駕駛線路;在車輛行駛時(shí)需要根據(jù)周邊變化,控制執(zhí)行層的設(shè)備對車輛進(jìn)行相應(yīng)的控制;
自動駕駛控制器需要接受、分析、處理的信號大量且復(fù)雜,從而為路徑規(guī)劃和駕駛決策提供支持的多域控制器將會是發(fā)展的趨勢。
作為自動駕駛的主要參與方,車廠和互聯(lián)網(wǎng)企業(yè)的策略有很大差異,前者的目標(biāo)以量產(chǎn)銷售為主,從L2及L3級別的自動駕駛逐漸升級是更具現(xiàn)實(shí)和經(jīng)濟(jì)性的策略。
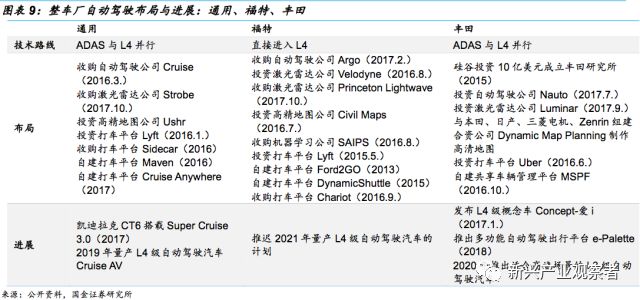
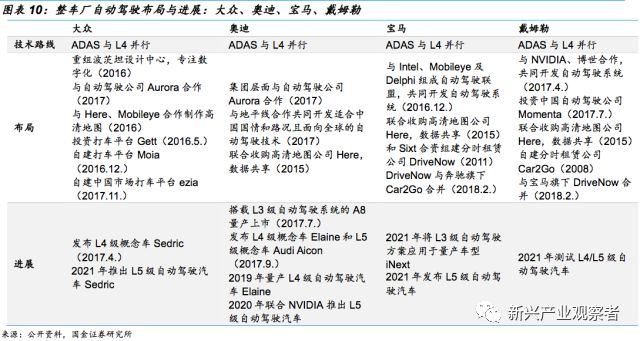
整車廠方面,不少車廠都提出了自己的解決方案:從L2到L4,我們分別分析了Tesla的Autopilot、Audi的A8 AI和通用Cruise AV;
L2級系統(tǒng)解決方案已經(jīng)普遍進(jìn)入量產(chǎn)階段:特斯拉Autopilot調(diào)整車道、駛出高速等,OTA更新能夠幫助系統(tǒng)訓(xùn)練和迭代算法;
奧迪A8是市場上第一款具備L3級自動駕駛能力的量產(chǎn)車:中央控制器zFAS則是其自動駕駛的核心技術(shù);
通用公布了2019年量產(chǎn)L4級自動駕駛汽車Cruise AV的計(jì)劃:車內(nèi)沒有方向盤、制動和油門踏板。
對Google、百度這類互聯(lián)網(wǎng)企業(yè)而言,自動駕駛是切入出行這個(gè)生活場景的重要機(jī)會,他們更傾向于以完全自動駕駛為目標(biāo)構(gòu)建系統(tǒng)平臺。
Google的Waymo與少數(shù)整車廠和傳感器廠商進(jìn)行深度合作,憑借軟件算法的領(lǐng)先優(yōu)勢取得了突破性的進(jìn)展,并且將與整車廠合作開發(fā)定制化的車輛投入商業(yè)化運(yùn)營;
百度依托Apollo平臺,整合了多家產(chǎn)業(yè)鏈上下游的企業(yè),旨在向合作伙伴提供一個(gè)開放、完整、安全的軟件平臺。
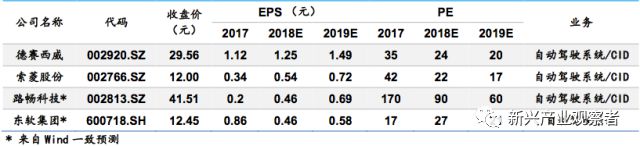
基于產(chǎn)業(yè)前景和潛在的巨大市場,給予行業(yè)買入評級,上市公司方面看好德賽西威、索菱股份,建議關(guān)注路暢科技、東軟集團(tuán)。
總論:決策層是自動駕駛的大腦
1.1 自動駕駛實(shí)現(xiàn):決策層、感知層、執(zhí)行層
自動駕駛系統(tǒng)可分為決策層、感知層、執(zhí)行層,以及高精地圖和車聯(lián)網(wǎng)的支持。
決策層:依據(jù)獲取的信息來進(jìn)行決策判斷,確定適當(dāng)工作模型,制定相應(yīng)控制策略,替代人類做出駕駛決策。
感知層:環(huán)境信息和車內(nèi)信息的采集與處理。
執(zhí)行層:指系統(tǒng)在做出決策后,替代人類對車輛進(jìn)行控制,反饋到底層模塊執(zhí)行任務(wù)。
1.2 決策層的重要性:處理數(shù)據(jù)控制車輛的核心
自動駕駛系統(tǒng)將駕駛認(rèn)知形式化,利用駕駛認(rèn)知的數(shù)據(jù)表達(dá)語言,設(shè)計(jì)通用的自動駕駛軟件架構(gòu)。在這一架構(gòu)中,決策層并不直接與傳感器信息發(fā)生耦合,而是基于多傳感器的感知信息、駕駛地圖和車聯(lián)網(wǎng)通信等信息綜合形成的駕駛狀態(tài)完成自主決策。
一方面決策層需要收集感知層的數(shù)據(jù),分析勾畫周邊環(huán)境,定義駕駛場景,規(guī)劃駕駛路線。
另一方面決策層需要控制執(zhí)行層,按照規(guī)劃的駕駛路線進(jìn)行車輛動力、轉(zhuǎn)向、制動的控制,并且預(yù)判路況做出相應(yīng)的車輛控制。
1.3發(fā)展趨勢:多域控制器
多域控制器MDC(Multi Domain Controller)是通過一塊ECU,接入不同傳感器的信號并進(jìn)行對信號進(jìn)行分析和處理,最終發(fā)出控制命令。MDC跟DCU(Domain Control Unit)域控制器類似,本質(zhì)上是為了解決汽車ECU增多之后,汽車控制系統(tǒng)變得復(fù)雜,且能力達(dá)到上限的問題。
在自動駕駛領(lǐng)域,控制器需要接受、分析、處理的信號大量且復(fù)雜,多域控制是必然的發(fā)展趨勢,如奧迪L3級別自動駕駛的中央控制器zFAS就是一個(gè)多域控制器。
MDC多域控制器
MDC平臺本身的可擴(kuò)展性,MDC所能夠?qū)拥膫鞲衅黝愋团c數(shù)目并不固定,可以根據(jù)OEM的需求對應(yīng)開發(fā),尤其適應(yīng)不同平臺車輛自動駕駛系統(tǒng)的傳感器配置;
能夠?qū)鞲信c處理分開,傳感器與ECU不再是一一對應(yīng)的關(guān)系,而是通過中央控制器MDC統(tǒng)一接受與處理信號,尤其對于OEM來說,可以根據(jù)需求更換傳感器的類別與供應(yīng)商。
1.4 相關(guān)公司
整車廠:商業(yè)化加速、方案逐漸成熟量產(chǎn)裝車
2.1行業(yè)變革趨勢:新車標(biāo)配L3,L4/L5逐漸成熟
目前在ADAS基礎(chǔ)上,L2到L3級別的自動駕駛將逐漸成為新車型的標(biāo)配,產(chǎn)生大量新增需求,這是目前主要的投資機(jī)會;L4到L5的完全自動駕駛也在逐漸成熟中,一旦商業(yè)化將影響產(chǎn)業(yè)的未來。
2.2 整車廠:積極布局、以最合理的方案量產(chǎn)裝車為目標(biāo)
從傳統(tǒng)車廠來說,對待自動駕駛一方面更慎重,大家都承認(rèn)自動駕駛會是未來,但發(fā)展自動駕駛的前提是不能影響現(xiàn)階段的產(chǎn)品開發(fā)與銷售;而另一方面各車廠都在積極布局自動駕駛,不斷的收購公司,加強(qiáng)自身的開發(fā)實(shí)力,在自動駕駛相關(guān)的技術(shù)專利方面也是積累最深厚。
并且整車廠在開發(fā)的過程中,要平衡成本、時(shí)間和技術(shù)實(shí)現(xiàn)的關(guān)系,以最合理的方案量產(chǎn)裝車為階段性的目標(biāo)。
各大傳統(tǒng)整車廠在自動駕駛領(lǐng)域均有自己的研發(fā)團(tuán)隊(duì),并且投入巨大,成果也在逐步顯現(xiàn),L2的系統(tǒng)解決方案已經(jīng)普遍進(jìn)入量產(chǎn)階段,奧迪的zFAS系統(tǒng)則是市場上第一家量產(chǎn)裝車的L3級解決方案,L4級方案也在開發(fā)中,甚至通用公布了2019年量產(chǎn)L4級自動駕駛汽車的計(jì)劃。
2.3 L2級方案:特斯拉Autopilot
特斯拉的方案類似于互聯(lián)網(wǎng)公司及消費(fèi)類產(chǎn)品的迭代方式,每一臺特斯拉都會配置當(dāng)時(shí)最新的硬件,然后通過OTA不斷更新固件,獲得更完善的駕駛輔助或自動駕駛功能。龐大的用戶群可以源源不斷地供給真實(shí)路況的駕駛數(shù)據(jù),幫助Autopilot訓(xùn)練和迭代算法。目前Autopilot已經(jīng)推出1.0和2.0版本。
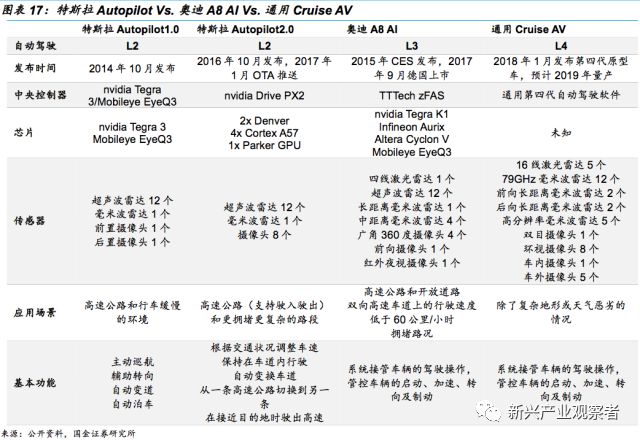
Autopilot相當(dāng)于L2級別的自動駕駛,能夠根據(jù)交通狀況調(diào)整車速;保持在車道內(nèi)行駛;自動變換車道而無需駕駛員介入;從一條高速公路切換至另一條;在接近目的地時(shí)駛出高速;在接近停車場時(shí)自動泊車。
2.4 L3級方案:奧迪A8 AI
是市場上第一款具備L3級別自動駕駛能力的量產(chǎn)車,在某些特定情況下,如在停車和駛離、時(shí)速60公里以下行駛或交通擁堵時(shí),該系統(tǒng)將接管奧迪A8的駕駛操控,而駕駛員則無需持續(xù)監(jiān)控車輛的駕駛與運(yùn)行。
整個(gè)自動駕駛系統(tǒng)由安全電腦、儀表盤、NMI用戶交互導(dǎo)航系統(tǒng)、電子剎車助力Brake Boost、電子穩(wěn)定系統(tǒng)ESC、電子轉(zhuǎn)向控制EPS、發(fā)動機(jī)控制單元、變速箱控制單元、車身電腦、后輪轉(zhuǎn)向系統(tǒng)、網(wǎng)關(guān)Gateway、電子懸掛控制平臺EEP和中央自動駕駛控制器zFAS組成。
中央控制器zFAS則是其自動駕駛的核心技術(shù),隨著多代的演進(jìn),終于zFAS從巨大的原型機(jī)變成了小型化和適應(yīng)汽車要求的模樣。zFAS,是德語zentrales Fahrerassistenz-Steuergeraet的縮寫,其構(gòu)造包括前方圖像處理單元、全景圖像處理單元、傳感器融合主控單元和應(yīng)用主控單元四部分。
zFAS由奧迪和德爾福、英偉達(dá)、TTTech、Mobileye合作而來,德爾福提供硬件,TTTech提供軟件支持(能夠達(dá)到車規(guī)ISO26262 ASIL D的最高安全等級),英偉達(dá)提供GPU,Mobileye提供視覺芯片,核心處理器包括:
Nvidia的Tegra K1包含192顆GPU,用于做4路環(huán)視圖像處理
Infineon的Aurix多核微控制器用于提供安全服務(wù),滿足諸如ISO 26262這樣的安全標(biāo)準(zhǔn)
Altera的Cyclone 5,用于基于FPGA技術(shù)高速處理信號融合,括障礙物、地圖的融合及各種傳感器的預(yù)處理工作
Mobileye的EyeQ3由于是封閉的芯片,用于進(jìn)行視覺信號處理
2.5 L4級方案:通用Cruise AV
2018年1月11日,通用聯(lián)合Cruise Automation對外公布了其第四代無人駕駛汽車概念原型,這款車稱為Cruise AV,由Bolt EV改裝而來,里面沒有方向盤、制動和油門踏板。
通用希望在2019年,就能夠?qū)⑦@款車型投入到它們的共享出行車隊(duì)使用。但在此之前,它們需要征得美國政府的同意。另外,還有7個(gè)州也需要單獨(dú)申請。
傳感層配置5個(gè)激光雷達(dá)、21個(gè)毫米波雷達(dá)和16個(gè)攝像頭:
5個(gè)激光雷達(dá):Velodyne的VLP16 16線激光雷達(dá);
21個(gè)毫米波雷達(dá):12個(gè)79GHz毫米波雷達(dá)由日本ALPS提供,2個(gè)前向2個(gè)后向長距離毫米波雷達(dá)推測由德國大陸提供,型號可能是ARS-408;5個(gè)高分辨率毫米波雷達(dá)由德國博世提供,主要是車兩側(cè)和正前方。
16個(gè)攝像頭:車頂10個(gè),包括一個(gè)基線長大約8厘米的雙目攝像頭,8個(gè)360度環(huán)視攝像頭,攝像頭周圍均有紅外LED,可以在低照度甚至黑夜下工作。車內(nèi)后視鏡位置有一個(gè)非無人駕駛版Bolt的單目攝像頭,車輛最前部位置有一個(gè)長距離單目攝像頭。車外后視鏡和車后部各兩個(gè)攝像頭。
2.6 特斯拉Autopilot Vs. 奧迪A8 AI Vs. 通用Cruise AV
科技公司:自動駕駛的開拓者、未來出行的顛覆者
從科技公司的角度出發(fā),他們對待自動駕駛的態(tài)度更積極,憑借在軟件算法層面的領(lǐng)先優(yōu)勢,科技公司很早就進(jìn)入到了自動駕駛的開發(fā)與測試中,是早期的開拓者;并且科技公司與整車廠合作開發(fā)定制化的車輛快速投入商業(yè)化運(yùn)營,也將是未來出行的顛覆者。
一方面這些科技公司在自動駕駛領(lǐng)域取得了突破性的進(jìn)展,在與整車廠合作的同時(shí),還保持自身的獨(dú)立性,維持了科技公司高效的執(zhí)行力與開發(fā)速度。
另一方面,大資本進(jìn)入這個(gè)行業(yè),勢必將極大促進(jìn)無人駕駛產(chǎn)業(yè)的發(fā)展,同時(shí)競爭也會更進(jìn)激烈。
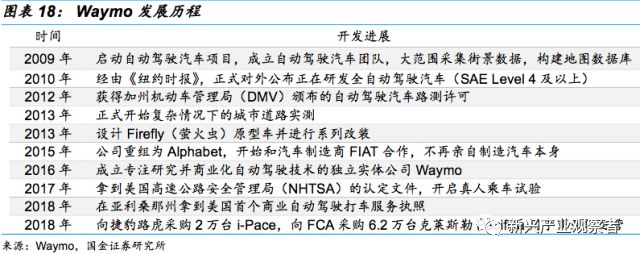
3.1 Waymo
谷歌母公司Alphabet旗下獨(dú)立的專注自動駕駛系統(tǒng)開發(fā)的子公司。谷歌自2009年起啟動自動駕駛項(xiàng)目,2016年成立獨(dú)立實(shí)體Waymo。
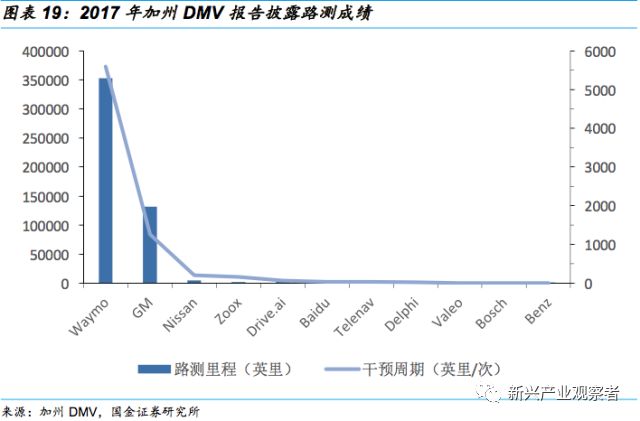
2017年加州DMV(california department of motor vehicles)自動駕駛報(bào)告披露的數(shù)據(jù)顯示,Waymo的車隊(duì)規(guī)模、路測里程和人工干預(yù)周期上均保持領(lǐng)先,真實(shí)路測里程2017年達(dá)到350萬英里,目前超過500萬英里,模擬路測里程超過25億英里,在加州開放公路測試?yán)锍?52,545英里,特別是人工干預(yù)周期,達(dá)到5596英里/次,第二名的GM為1254英里。通過報(bào)告可以看到,車隊(duì)規(guī)模大,路測里程越長,干預(yù)周期越長。因此自動駕駛系統(tǒng)研發(fā)也是一個(gè)需要較大財(cái)力、時(shí)間投入的工程。
根據(jù)Waymo安全報(bào)告披露,公司自動駕駛車輛通過四個(gè)步驟來完成:
“我在哪”:提前描繪目標(biāo)區(qū)域的高清3D地圖
“我周圍有什么”:通過傳感器感知周邊環(huán)境
“下面會發(fā)生什么”:處理環(huán)境信息,預(yù)測周邊環(huán)境變化情況
“我應(yīng)該怎么做”:規(guī)劃路線,車輛執(zhí)行
在與克萊斯勒合作的車型中,一輛車裝有5個(gè)激光雷達(dá),分別為前部3個(gè),頂部1個(gè)和尾部1個(gè);毫米波雷達(dá)4個(gè),前后部各2個(gè);攝像頭1個(gè),位于頂部;其他補(bǔ)充傳感器1個(gè),位于頂部。由于是測試車輛,安裝傳感器數(shù)量較多,配置冗余比較充分,成本也較高。
總體看Waymo是綜合實(shí)力最強(qiáng)的自動駕駛公司,路測車隊(duì)規(guī)模、路測里程都位于前列,并且路測成績較好,平均5596英里才需要一次人工干預(yù)。目前Waymo已經(jīng)開始在美國亞利桑那州進(jìn)行無人車的載客試運(yùn)營,之前還大規(guī)模向捷豹路虎訂購了 2 萬臺 I-PACE 純電動車,以及向向FCA采購6.2萬臺克萊斯勒Pacifica,準(zhǔn)備投入正式的自動駕駛商業(yè)化運(yùn)營。
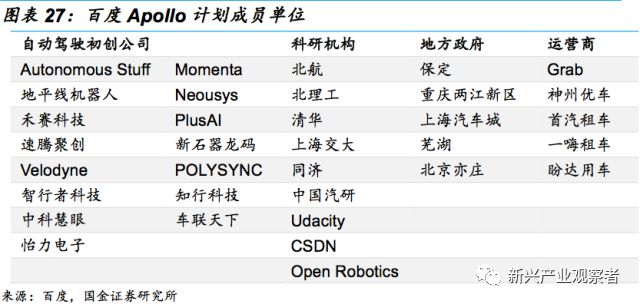
3.2 百度Apollo
2017年4月發(fā)布Apollo計(jì)劃,在百度內(nèi)部把車聯(lián)網(wǎng)、L3、L4各部門整合在一起加強(qiáng)了競爭力,在外部充當(dāng)了中國自動駕駛的旗手,召集起一個(gè)大聯(lián)盟,把車企和供應(yīng)商都囊括進(jìn)來,一方面加強(qiáng)聯(lián)盟內(nèi)的合作,另一方面尋求與政府合作、吸收外部資金。
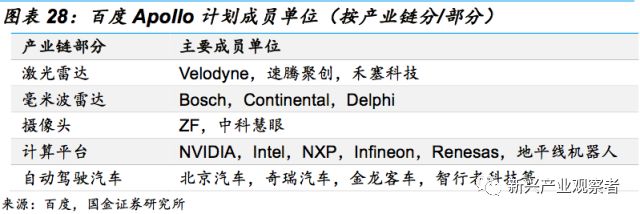
Apollo平臺是一套完整的軟硬件和服務(wù)系統(tǒng),包括車輛平臺、硬件平臺、軟件平臺、云端數(shù)據(jù)服務(wù)等四大部分。旨在向汽車行業(yè)及自動駕駛領(lǐng)域的合作伙伴提供一個(gè)開放、完整、安全的軟件平臺,幫助他們結(jié)合車輛和硬件系統(tǒng),快速搭建一套屬于自己的完整的自動駕駛系統(tǒng)。
硬件層面:
計(jì)算中心:Neousys Nuvo-6108GC,x86架構(gòu)的工業(yè)控制計(jì)算機(jī);
CAN通信卡:ESD CAN-PCIe/402-B4,與汽車執(zhí)行層進(jìn)行信號通信;
GPU和IMU:NovAtel SPAN-IGM-A1或者NovAtel SPAN ProPak6 和NovAtel IMU-IGM-A1,進(jìn)行GPS定位和慣性定位;
激光雷達(dá):Velodyne HDL-64E S3,掃描距離達(dá)到120米,水平360度掃描,垂直FOV26.9度;
毫米波雷達(dá):大陸集團(tuán)的ARS408-21,車輛前端探測;
攝像頭:Leopard Imaging LI-USB30-AR023ZWDR。
軟件層面:Ubuntu Linux 推薦版本14.04,包含通用模塊、控制模塊、數(shù)據(jù)模塊、校準(zhǔn)模塊、通信模塊、驅(qū)動模塊、深度學(xué)習(xí)模塊、定位模塊、監(jiān)測模塊、感知模塊、預(yù)測模塊、路徑規(guī)劃模塊等等。
整體工作流程大致是:路徑規(guī)劃模塊根據(jù)目的地位置計(jì)算出具體的導(dǎo)航信息,激光雷達(dá)、毫米波雷達(dá)和攝像頭拍攝到的數(shù)據(jù)配合高精度地圖由感知模塊計(jì)算出3D障礙物信息并識別交通標(biāo)志及交通信號,經(jīng)由預(yù)測模塊計(jì)算出障礙物的可能軌跡,并根據(jù)車輛定位模塊配合計(jì)劃模塊得到車輛應(yīng)該走的具體車道;在執(zhí)行過程中,車輛控制模塊結(jié)合車輛的當(dāng)前狀態(tài)計(jì)算加速、剎車和方向的操作信號,輸出到車內(nèi),實(shí)現(xiàn)了車輛的自動駕駛。
百度Apollo計(jì)劃以“開放”和“聯(lián)盟”為特色,自計(jì)劃宣布以來已有近百家整車廠、Tier1、Tier2、科研機(jī)構(gòu)、運(yùn)營商等成為盟友,也包括北京、上海、重慶、福建平潭等地方政府。
就在一周前,百度 Apollo 和重慶力帆集團(tuán)旗下分時(shí)租賃平臺盼達(dá)用車、重慶兩江新區(qū)合作,在兩江新區(qū)互聯(lián)網(wǎng)產(chǎn)業(yè)園開啟了為期 1 個(gè)月的自動駕駛共享汽車試運(yùn)營。
與金龍客車合作的小巴“阿波龍”,預(yù)計(jì)2018年量產(chǎn),在國內(nèi)自動駕駛系統(tǒng)研發(fā)上保持領(lǐng)先。

3.3 Waymo小聯(lián)盟 Vs. 百度Apollo大聯(lián)盟
通過上述分析我們看到,Waymo走的是“小聯(lián)盟”戰(zhàn)略,與少數(shù)整車廠(克萊斯勒、捷豹、本田等)和傳感器廠商進(jìn)行深度合作。它具有先發(fā)優(yōu)勢,積累較多路測里程和較大車隊(duì)規(guī)模,路測成績也較好。而百度走的是“大聯(lián)盟”的戰(zhàn)略,依托Apollo平臺,盡可能地?cái)U(kuò)大“朋友圈”。但除數(shù)據(jù)共享外尚未看到成熟的合作模式。
3.4 安全策略:Waymo逐步進(jìn)化 Vs. Mobileye不造成事故
3.4.1 Waymo
之所以將Waymo的安全策略稱為“逐步進(jìn)化”與其自動駕駛戰(zhàn)略和強(qiáng)調(diào)逐步接近真實(shí)世界的測試有關(guān)。
在自動駕駛戰(zhàn)略上,Waymo堅(jiān)持“創(chuàng)造一個(gè)好的駕駛員”為目標(biāo),堅(jiān)持直接L4級別的自動駕駛研發(fā),目標(biāo)是待技術(shù)成熟就能直接替代駕駛員。這與它互聯(lián)網(wǎng)公司的本質(zhì)有關(guān),首先它不是個(gè)硬件公司,所以2015年以后它放棄了自主研發(fā)汽車,轉(zhuǎn)而與FCA等公司合作。此外,雖然它現(xiàn)在使用的激光雷達(dá)等硬件設(shè)備是自研的,但也沒有單獨(dú)向外出售的動作,大量的資源還是用在自動駕駛系統(tǒng)的研發(fā)上。當(dāng)然,作為谷歌母公司Alphabet旗下公司,一個(gè)最大的優(yōu)勢是母公司資金實(shí)力雄厚,可以支撐巨大的研發(fā)費(fèi)用而不需要提前自主產(chǎn)生利潤。
以自動駕駛軟件為例說明Waymo嚴(yán)格的測試程序
1、模擬測試:
在模擬中,嚴(yán)格進(jìn)行測試軟件的更新,然后將其部署到模型中,模擬車輛在公共道路上遇到的最具挑戰(zhàn)性的情況,并將其轉(zhuǎn)化為虛擬場景,供我們的自動駕駛車軟件在模擬中練習(xí):
2、封閉道路測試:
Waymo在加利福尼亞州設(shè)立了一個(gè)91英畝的封閉道路測試園區(qū),包括高速公路,郊區(qū)車道和鐵路道口等所有設(shè)施。團(tuán)隊(duì)使用園區(qū)對軟件進(jìn)行驗(yàn)證,并對具有挑戰(zhàn)性或罕見的場景進(jìn)行階段性分析。
3、公共道路駕駛:
測試提供了一個(gè)連續(xù)的反饋循環(huán),即工程師觀察現(xiàn)實(shí)情況,對軟件進(jìn)行調(diào)整以優(yōu)化駕駛,然后進(jìn)行更新,持續(xù)地完善系統(tǒng)。這種迭代方法有助于擴(kuò)大運(yùn)營設(shè)計(jì)領(lǐng)域和車輛功能,并且安全地?cái)U(kuò)展我們的能力,使車輛能夠安全地在L4級別運(yùn)行。
3.4.2 Mobileye
Mobileye對自動駕駛的安全策略與Waymo有很大的不同,因?yàn)楸举|(zhì)上它是個(gè)硬件公司,商業(yè)模式是“賣硬件”,這使得他們的安全策略不可能像Waymo那樣堅(jiān)持面面俱到,大量測試。其安全策略可以表述為,以較強(qiáng)的理論模型(即RSS模型)“塑造”一個(gè)真實(shí)世界的映射,以此為基礎(chǔ)制定一系列的滿足“不制造事故(區(qū)別于不涉及事故)”的條件,從而盡量減少測試所花的時(shí)間和資源。
多方安全的責(zé)任敏感安全(RSS)模型
RSS模型將安全駕駛的基本原則轉(zhuǎn)化成機(jī)器可以理解的數(shù)學(xué)公式。例如,尾隨其他車或變道時(shí)的安全距離、道路優(yōu)先權(quán)和障礙物避讓等。如果AI系統(tǒng)發(fā)出的指令違反了任何一條基本原則,RSS將拒絕該指令。
絕對安全是不可能的,引入“事故責(zé)任”的概念,即RSS的前提是,雖然自動駕駛汽車可能涉及事故,但絕不會造成事故。主要包括以下四條規(guī)則:
1. 保持與您前方車輛的安全距離,以便在突然剎車時(shí)您能夠及時(shí)停下來;
2. 保持與您側(cè)方車輛的安全距離,并且在執(zhí)行側(cè)向操縱和切入另一輛車的軌跡時(shí),必須讓其他車有足夠的空間來回應(yīng);
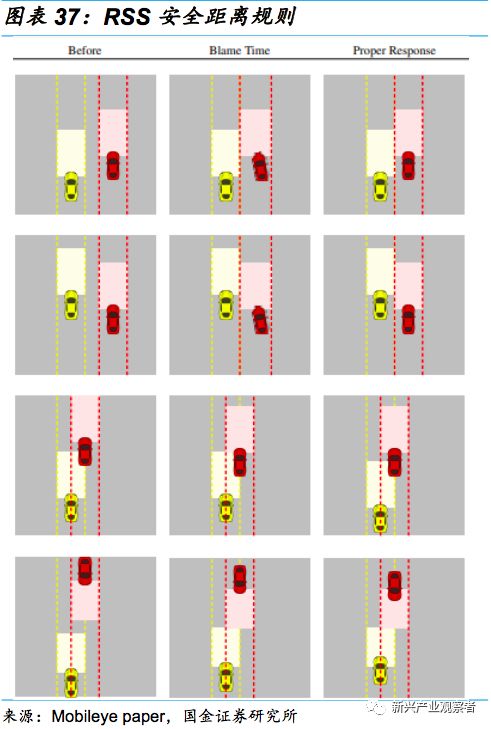
3. 應(yīng)該尊重“道路權(quán)”規(guī)則,但“道路權(quán)”是給予的,不是靠“爭取”的;
4. 小心盲區(qū),例如,一個(gè)小孩可能會被擋在停放的汽車后面。
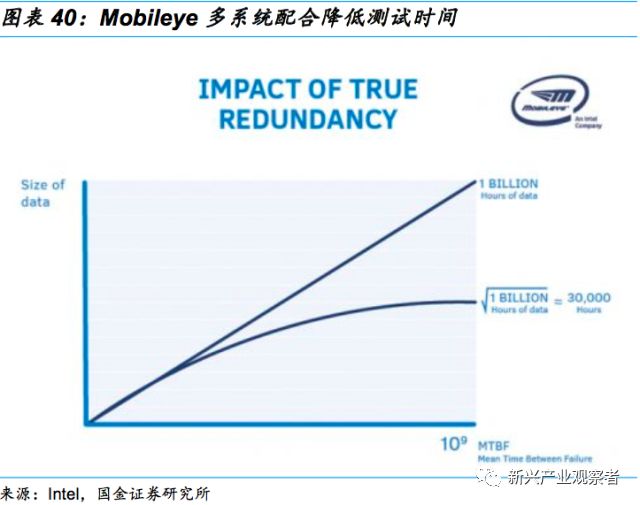
總結(jié):Mobileye的安全策略可以用“不造成事故”和“多系統(tǒng)配合”總結(jié),即通過理論模型塑造一個(gè)不造成事故的規(guī)則,使得即使發(fā)生事故,自動駕駛車輛也不是負(fù)責(zé)人。此外,還通過兩套相對獨(dú)立的系統(tǒng)配合,獨(dú)立發(fā)現(xiàn)產(chǎn)生問題的場景,并配合解決問題,形成大幅縮短測試時(shí)間的效果。這是Mobileye作為硬件廠商沒有太多資源和時(shí)間進(jìn)行大范圍測試條件下的策略,同樣也是由于開始測試時(shí)間較晚,相對Waymo有劣勢情況下的選擇。
3.4.3 Waymo Vs. Mobileye

-
傳感器
+關(guān)注
關(guān)注
2553文章
51390瀏覽量
756564 -
軟件系統(tǒng)
+關(guān)注
關(guān)注
0文章
63瀏覽量
9524 -
自動駕駛
+關(guān)注
關(guān)注
785文章
13930瀏覽量
167002
原文標(biāo)題:自動駕駛系統(tǒng):量產(chǎn)導(dǎo)向還是性能導(dǎo)向
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
自動駕駛真的會來嗎?
自動駕駛的到來
高級安全駕駛員輔助系統(tǒng)助力自動駕駛
UWB主動定位系統(tǒng)在自動駕駛中的應(yīng)用實(shí)踐
如何讓自動駕駛更加安全?
自動駕駛汽車的處理能力怎么樣?
自動駕駛系統(tǒng)設(shè)計(jì)及應(yīng)用的相關(guān)資料分享
自動駕駛技術(shù)的實(shí)現(xiàn)
詳細(xì)說明多項(xiàng)自動駕駛底層軟件技術(shù)
LabVIEW開發(fā)自動駕駛的雙目測距系統(tǒng)
對自動駕駛軟件產(chǎn)業(yè)進(jìn)行的深入分析
自動駕駛技術(shù)涉及到的AI科技

自動駕駛系統(tǒng)涉及哪些技術(shù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論