") 智能汽車毫米波雷達電磁抗擾度測試方法研究
智能汽車毫米波雷達電磁抗擾度測試方法研究
智能車輛多采用毫米波雷達作為環(huán)境感知的傳感器,以實現駕駛輔助功能。毫米波雷達系統(tǒng)的電磁抗擾能力將影響車輛輔助駕駛功能的實現和行車安全。文章在對毫米波雷達系統(tǒng)的原理和目標識別理論進行研究的基礎上,通過模擬目標激活毫米波雷達系統(tǒng),并在不同等級場強下進行毫米波雷達系統(tǒng)的抗擾測試。
引言
隨著汽車行業(yè)的發(fā)展,誕生出一批高度電子化、自動化的智能汽車,這些車輛搭載了先進的駕駛輔助系統(tǒng)(ADAS),ADAS 的存在極大提升了駕駛的舒適性,但同時也為行車安全帶來了不確定因素。由于智能汽車內部有諸多電子電氣系統(tǒng),這些系統(tǒng)極易受到外界電磁信號的干擾,因此電磁抗擾能力是智能汽車的重要安全性能指標之一。
目前,智能汽車的 ADAS 系統(tǒng)大多將毫米波雷達作為感知環(huán)境的傳感器,利用毫米波雷達實現對車輛前方目標的檢測,通過分析周邊車輛及障礙物與自車的相對距離、相對速度等關系實現控制自車的安全距離與安全車速,實現智能駕駛相關功能。因此,積極開展智能汽車毫米波雷達電磁抗擾度測試方法研究具有重要意義 [1]。
1. 毫米波雷達原理
毫米波雷達按工作原理的不同可以分為脈沖式毫米波雷達與調頻式連續(xù)毫米波雷達兩類。
脈沖式毫米波雷達通過發(fā)射脈沖信號與接收脈沖信號之間的時間差來計算目標距離。如果目標距離較近,則發(fā)射與接收脈沖信號之間的時間差相對較小。由于智能車輛需要根據目標距離計算結果激發(fā)相應模塊以實現特定功能,因此要求雷達計算目標距離的時間盡可能短,這種情況下就需要系統(tǒng)采用高速的信號處理技術,導致脈沖式毫米波雷達的近距離探測技術復雜、成本較高。在實際應用中,智能車輛一般選擇成本低廉、結構相對簡單的調頻式連續(xù)毫米波雷達。
調頻式連續(xù)毫米波雷達是利用多普勒效應測量得出不同距離的目標的速度,它通過發(fā)射源向給定目標發(fā)射微波信號,并分析發(fā)射信號頻率和反射信號頻率之間的差值,精確測量出目標相對于雷達的運動速度等信息。
1.1 測距原理
雷達調頻器通過天線發(fā)射微波信號,發(fā)射信號遇到目標后,經目標的反射會產生回波信號,發(fā)射信號與回波信號相比形狀相同,時間上存在差值。以雷達發(fā)射三角波信號為例,發(fā)射信號與返回的回波信號對比如圖 1(a) 所示。
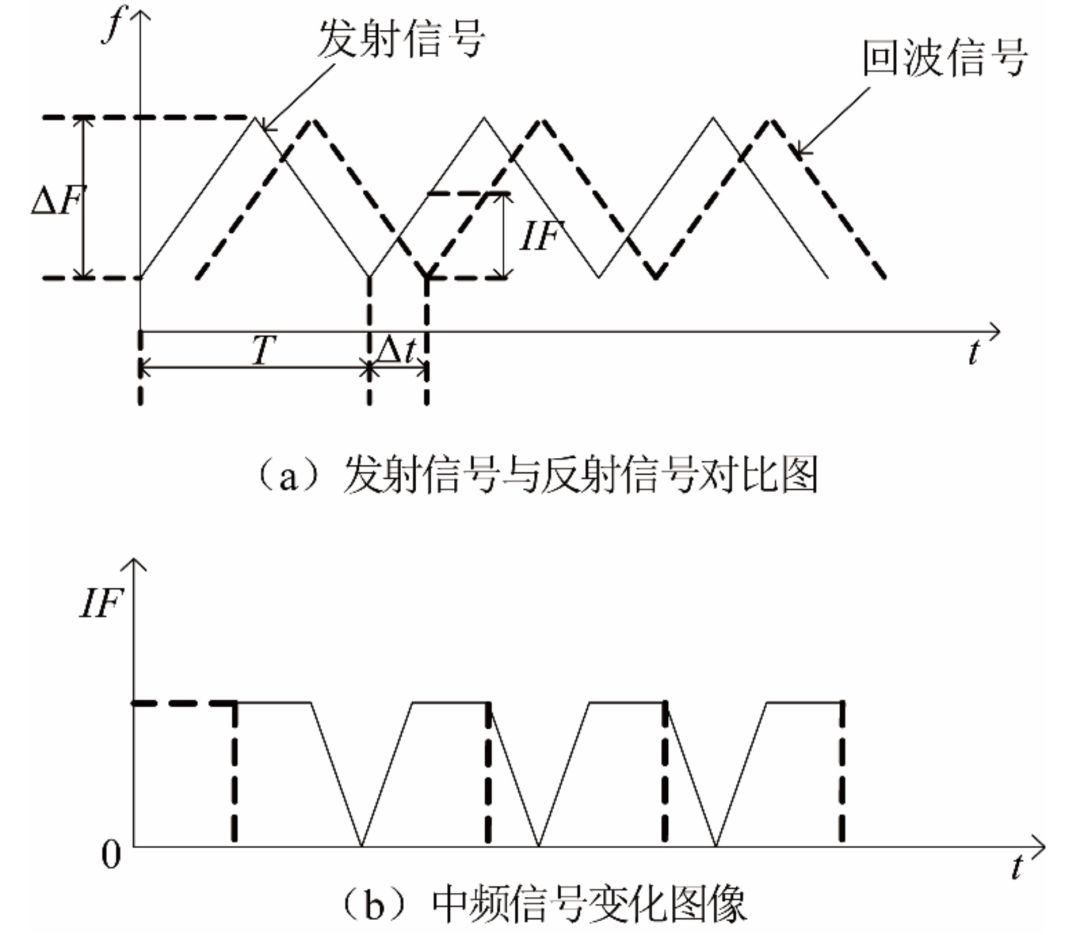
圖 1 調頻連續(xù)式毫米波雷達測距原理
雷達探測目標的距離半徑 R 為

式中:Δt 為發(fā)射信號與回波信號的時間間隔(ms);c 為光速。
IF 變化圖像如圖 1(b)所示,發(fā)射信號與回波信號形狀相同,因此根據三角函數的關系式可得:

式中:T 為發(fā)射信號的周期(ms);ΔF 為調頻帶寬;IF 為發(fā)射信號與回波信號混頻后的中頻信號頻率。
根據式(1)和式(2)可以得出目標距離 R 與中頻信號間的關系式為:

1.2 測速原理
當目標與雷達信號發(fā)射源之間存在相對運行時,發(fā)射信號與回波信號之間除存在時間差外,頻率上還會產生多普勒位移 f_d,對比圖見圖 2 [2]。
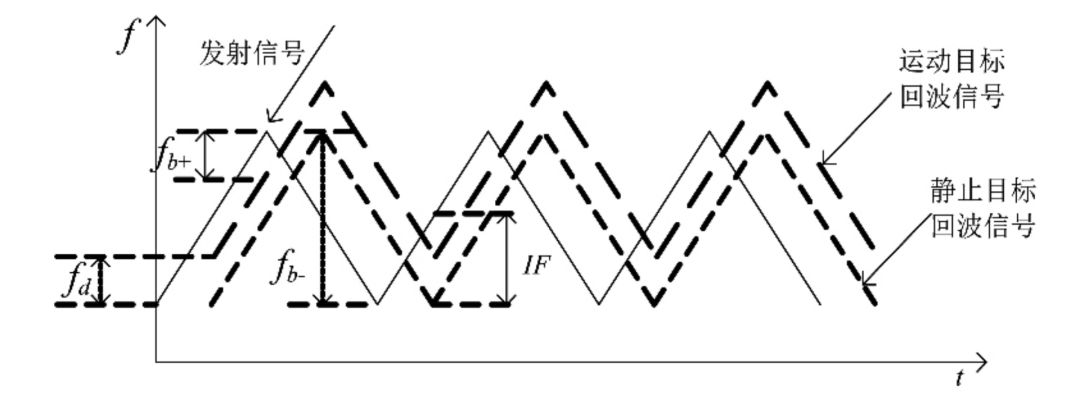
圖 2 調頻連續(xù)式毫米波雷達測距原理
如圖 2 所示,中頻信號在信號上升階段的頻率 f_b+ 與下降階段的頻率 f_b- 分別用式(4)、式(5)表示:

式中:IF 為發(fā)射源與目標處于相對靜止狀態(tài)時的中頻信號頻率;f_d 為發(fā)射信號與回波信號間的多普勒位移,計算公式為:

目標與雷達信號發(fā)射源之間的相對運動速度 v 可以根據多普勒原理計算:

式中:f_o 為發(fā)射波的中心頻率;λ 為發(fā)射波波長。
2. 毫米波雷達目標識別系統(tǒng)理論分析
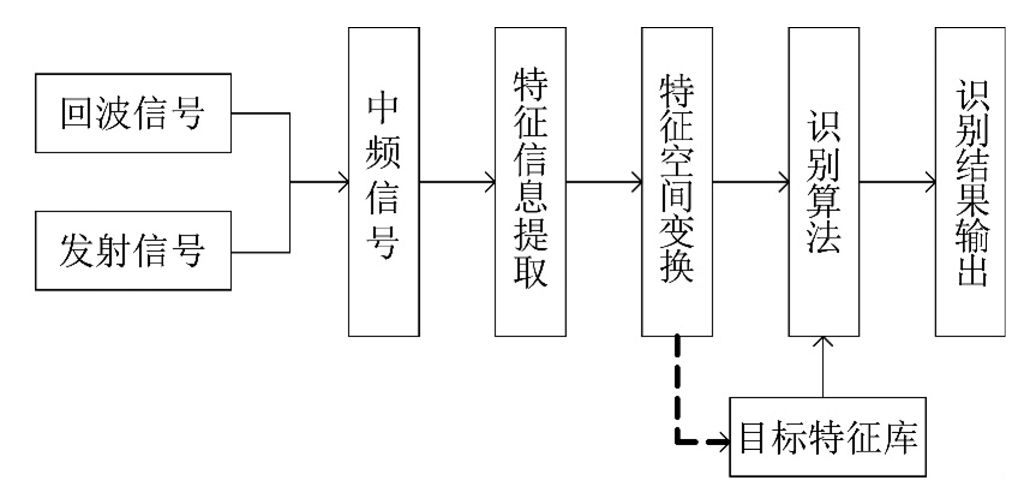
圖 3 目標識別流程圖
毫米波雷達的目標識別是通過分析回波特征信息,采用數學手段通過各種特征空間變換來抽取目標的特性參數,如大小、材質、形狀等,并將抽取的特性參數與已建立的數據庫中的目標特征參數進行比較、辨別和分類,流程如圖 3 所示。
2.1 特征信息提取
利用發(fā)射源與目標處于相對靜止狀態(tài)時的中頻信號可以進行目標特征信息的提取,以有效進行目標識別,一般情況下,提取的信息可以分為 5 類:
(1)回波信號參數。回波信號的主要參數有:極點和斜升響應(反應目標結構信息),回波幅相波形(反應目標綜合信息),回波頻率/時寬/帶寬/信號形式(反應輻射源類型);
(2)雷達截面積參數。反應目標材料和形狀等信息的 RCS 序列、極值、方差、統(tǒng)計分布和均值等;
(3)運動參數。包括目標運動速度、軌跡、高度等,同時也包括目標微動產生的微多普勒等;
(4)一維、二維等圖像參數;
(5)基于極化散射矩陣、散射中心分布和角閃爍的參數。
2.2 特征空間變換
特征空間變換是利用梅林變換、沃爾什變換、馬氏距離線性變換等正交變換方法,解除不同目標特征間的相關性,加強不同目標特征間的可分離性,最終剔除冗余特征,達到減少計算量的目的 [3]。
2.3 識別算法
識別算法主要有 3 部分內容:空目標去除、無效目標去除和靜止目標去除,如圖 4 所示。
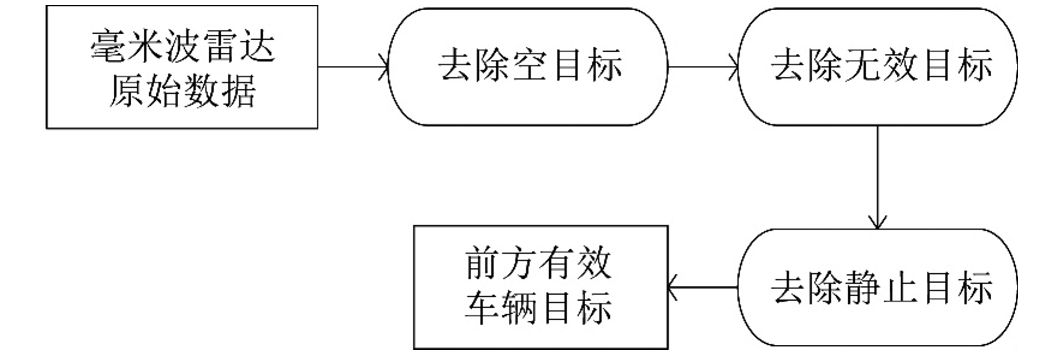
圖 4 識別算法流程圖
對于空目標的去除,可以通過監(jiān)測 CAN 相應數據存儲位,如果該存儲位為特定數值,即表示該信道沒有檢測到目標信號,此時可以通過簡單的代碼實現空目標去除。
對于無效目標,其與有效目標的主要區(qū)別是目標數據出現時間極短且參數跳躍性比較大,不符合車輛的行駛特征,因此可以通過分析相鄰采樣點之間的車輛數據變化情況實現無效干擾目標的識別,對無效目標進行去除。
對于靜止目標,若本車采集到的自車行駛速度與目標車輛和本車之間的相對速度的絕對值相等,且本車運動方向與檢測到的相對速度的方向相反,則可以判定該目標為靜止目標 [4]。
2.4 目標特征庫建立
目標特征庫的建立有 3 種方法:(1)通過實際試驗數據建立;(2)通過半實物仿真數據建立;(3)通過虛擬仿真數據建立。
實際試驗數據目標特征庫是由在實際電磁環(huán)境中對雷達目標測量得出的數據構成,可信度較高,但同時數據庫建立成本較高。
半實物仿真數據目標特征庫是由一組半實物仿真數據構成,通過模擬雷達的工作特性,對在微波暗室中的縮比目標模型進行微波測量,得到半實物仿真數據,這種采取緊縮場等近似手段得出的數據具有一定可信度,但也存在成本較高的問題。
虛擬仿真技術是利用計算機對目標進行建模,并對模型的回波進行仿真分析,按照需要修改相應參數,即可獲得相關的數據,繼而建立目標特征庫,這種方式所用的時間短并且成本低,但獲取的數據可信度不高。在實際應用中,可以結合實際情況選擇合適的方法建立數據庫 [3,5]。
3. 毫米波雷達系統(tǒng)電磁抗擾測試環(huán)境
毫米波雷達系統(tǒng)的電磁抗擾測試環(huán)境包括輻射抗擾度測試系統(tǒng)、暗室音視頻監(jiān)控系統(tǒng)、虛擬環(huán)境模擬系統(tǒng) 3 個部分,如圖 5 所示。
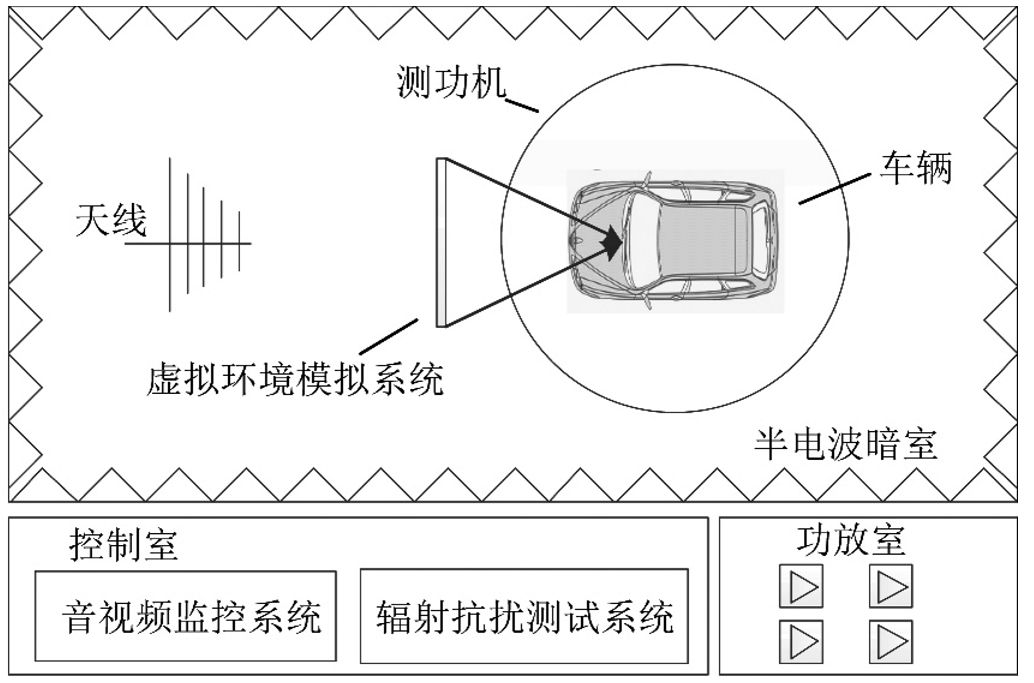
圖 5 毫米波雷達系統(tǒng)電磁抗擾測試環(huán)境
其中,輻射抗擾測試系統(tǒng)(包括信號源、功率放大器、天線)用于向車輛施加一定等級的場強;暗室音視頻監(jiān)控系統(tǒng)(包括音視頻監(jiān)控設備、顯示器等)用于將車輛儀表盤報警信息顯示在控制室內;虛擬環(huán)境模擬系統(tǒng)是毫米波雷達系統(tǒng)激活的關鍵,用于向毫米波雷達呈現虛擬的道路環(huán)境[6]。
基于毫米波雷達系統(tǒng)的工作原理及目標識別理論,可以在暗室內通過真實反射波和人為構造反射波兩種方式激活毫米波雷達系統(tǒng)。
當采用真實反射波激活毫米波雷達系統(tǒng)時,可以在車輛前方布置障礙物將毫米波雷達的發(fā)射信號進行反射,使雷達模塊可以感知預設信息,并向安全測算模塊傳遞該信息,繼而激發(fā)執(zhí)行模塊。
當采用人為構造反射波激活毫米波雷達系統(tǒng)時,可以利用一對微波天線及一臺微波收發(fā)一體機將具有一定頻移的雷達波反饋至毫米波雷達,使其認為前方存在障礙物。
微波收發(fā)一體機可以直接讀取毫米波雷達發(fā)射波的工作頻率和周期,并可以人工輸入距離 R 和速度 V 的參數。通過計算,微波收發(fā)一體機將攜帶上述兩種參數的反饋雷達波發(fā)送至毫米波雷達,在車輛前方 R 處模擬一個行駛速度為V的障礙物 [1]。
4. ADAS 毫米波雷達系統(tǒng)電磁抗擾測試
4.1 測試過程
試驗布置參照 ISO 11451-2:2016 標準,車輛狀態(tài)設置為:車速 50 km/h、大燈開啟、車門閉鎖、空調制冷中檔狀態(tài)、風機中檔狀態(tài)、收音機 87.5 MHz、ADAS 相關功能開啟。
試驗中在車輛前方利用障礙物模擬目標車位置,成功激活了毫米波雷達系統(tǒng)相關模塊功能,使車輛顯示屏上出現了前方車輛影像。為全面考核毫米波雷達系統(tǒng)的電磁抗擾能力,將發(fā)射天線正對車輛前方和右側進行測試。
4.2 測試結果分析
分別對車輛施加 30 V/m、45 V/m、60 V/m、90 V/m及 100 V/m 場強的抗擾信號,觀察車輛在 20~2000 MHz 頻段內抗擾性能,并記錄車輛現象,車輛異常現象如表 1 所示。
表 1 車輛異常現象
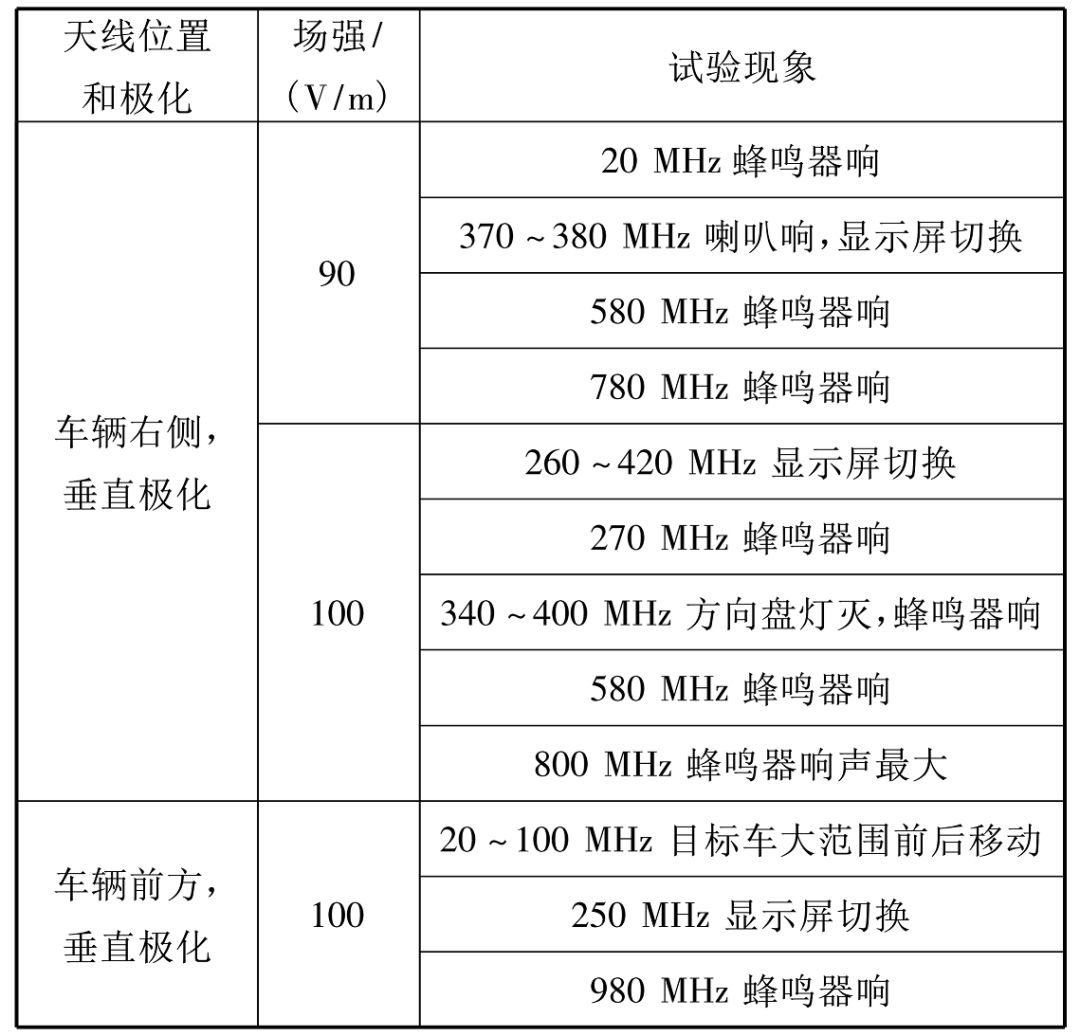
從表 1 中可以看出,在多數測試條件下,車輛出現了蜂鳴器響、顯示屏切換等故障現象,這些現象雖然對車輛的安全性影響較小,但會降低產品的電磁兼容性品質,引起較大的客戶抱怨。
此外,在車輛前方進行 100 V/m 垂直極化場的毫米波雷達系統(tǒng)抗擾測試時,車輛在 20~100 MHz 頻段內出現了目標車大范圍前后移動的情況,這種情況可能會導致 ADAS 控制器的誤判,造成 ACC、AEB、FCW 等功能執(zhí)行模塊的異常操作,嚴重威脅車輛的行駛安全。
5. 結語
毫米波雷達系統(tǒng)抗擾試驗測試結果顯示,在一定強度的場強下,電磁信號會干擾毫米波雷達系統(tǒng),影響系統(tǒng)及車輛功能。
現實環(huán)境中,在短波電臺、大型基站等附近均存在類似等級的場強,對智能車輛的安全行駛構成了影響。在這種情況下,進行毫米波雷達系統(tǒng)的抗擾測試,對于企業(yè)評估產品性能具有重要意義。
-
adas
+關注
關注
309文章
2193瀏覽量
208860 -
智能汽車
+關注
關注
30文章
2893瀏覽量
107568 -
毫米波雷達
+關注
關注
107文章
1054瀏覽量
64543
原文標題:ADAS 毫米波雷達原理與電磁抗擾能力初探
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦






 工商網監(jiān)
工商網監(jiān)
評論