") 自適應(yīng)均衡器的LMS和RLS兩種算法的特性與仿真分析
自適應(yīng)均衡器的LMS和RLS兩種算法的特性與仿真分析
自適應(yīng)均衡屬于自適應(yīng)信號(hào)處理的應(yīng)用范疇,各種各樣的自適應(yīng)均衡算法如迫零(ZF)算法、最小均方(LMS)算法、遞歸最小二乘(RLS)算法、變換域均衡算法、Bussgang 算法、高階或循環(huán)統(tǒng)計(jì)量算法、基于非線性濾波器或神經(jīng)網(wǎng)絡(luò)的均衡算法等應(yīng)運(yùn)而生。均衡器通常工作在接收機(jī)的基帶或中頻信號(hào)部分,基帶信號(hào)的復(fù)包絡(luò)含有信道帶寬信號(hào)的全部信息,所以,均衡器通常在基帶信號(hào)完成估計(jì)信道沖激響應(yīng)和解調(diào)輸出信號(hào)中實(shí)現(xiàn)自適應(yīng)算法等,本文選擇了兩種典型的自適應(yīng)算法:以LMS自適應(yīng)均衡器和RLS自適應(yīng)均衡器為基礎(chǔ),用MATLAB 仿真軟件對(duì)LMS和RLS兩種算法進(jìn)行仿真,比較并分析了兩種算法的性能。
1 自適應(yīng)均衡器
一種均衡器,可用于校正高速雙極性信號(hào)的符號(hào)間干擾。它可響應(yīng)電話線路的靜態(tài)和動(dòng)態(tài)性能變化。均衡器包括若干級(jí)邏輯控制線路及抽頭線路,每個(gè)抽頭線路有一個(gè)積分器,積分器由電子開(kāi)關(guān)控制進(jìn)行充電放電。積分器的輸出在邏輯控制下相加或相減。均衡信號(hào)還可以在線路變壓器處直接監(jiān)視。
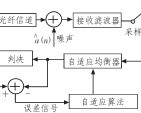
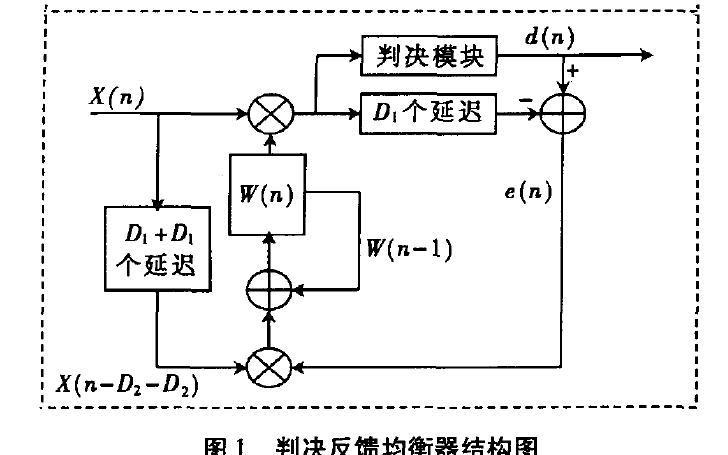
自適應(yīng)均衡器的工作過(guò)程包含兩個(gè)階段,典型的訓(xùn)練序列是偽隨機(jī)二進(jìn)制信號(hào)或一個(gè)固定的波形信號(hào)序列,緊跟在訓(xùn)練序列后面的是用戶消息碼元序列。接收機(jī)的自適應(yīng)均衡器采用遞歸算法估計(jì)信道特性,調(diào)整濾波器參數(shù),補(bǔ)償信道特性失真,訓(xùn)練序列的選擇應(yīng)滿足接收機(jī)均衡器在最?lèi)毫拥男诺拦烙?jì)條件下也能實(shí)現(xiàn)濾波器參數(shù)調(diào)整。所以,均衡器參數(shù)基本上接近最佳值,以保證用戶數(shù)據(jù)的接收,成為均衡器的收斂。用戶數(shù)據(jù)序列需要被分割成數(shù)據(jù)分組或時(shí)隙分段傳送。無(wú)線通信均衡器原理簡(jiǎn)圖如圖1所示。
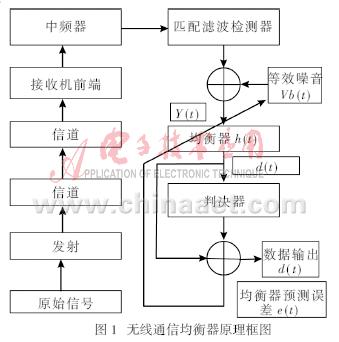
圖1中,原始信號(hào)為x(t),h(t)是發(fā)射機(jī)、無(wú)線信道和接收機(jī)射頻/中頻級(jí)合在一起的系統(tǒng)等復(fù)合濾波器的沖激響應(yīng),所以均衡器的輸入可表示為:

式中H(t)是H(t)的復(fù)共軛,高均衡器機(jī)射頻/中頻級(jí)合在一起的系統(tǒng)等復(fù)濾波器沖激響應(yīng)。設(shè)均衡器的沖激響應(yīng)是heq(t),均衡器輸出碼元波形可表示為:
2 自適應(yīng)均衡算法
利用自適應(yīng)均衡器補(bǔ)償未知時(shí)變信道的特性,需要采用有效的算法跟蹤信道特性變化來(lái)更新均衡器的加權(quán)系數(shù)。
2.1 基于LMS的自適應(yīng)均衡算法
感知器和自適應(yīng)線性元件在歷史上幾乎是同時(shí)提出的,并且兩者在對(duì)權(quán)值的調(diào)整的算法非常相似。它們都是基于糾錯(cuò)學(xué)習(xí)規(guī)則的學(xué)習(xí)算法。感知器算法存在如下問(wèn)題:不能推廣到一般的前向網(wǎng)絡(luò)中;函數(shù)不是線性可分時(shí),得不出任何結(jié)果。而由美國(guó)斯坦福大學(xué)的Widrow和Hoff在研究自適應(yīng)理論時(shí)提出的LMS算法,由于其容易實(shí)現(xiàn)而很快得到了廣泛應(yīng)用,成為自適應(yīng)濾波的標(biāo)準(zhǔn)算法。
LMS算法[1]采用的是最小均方誤差準(zhǔn)則,代價(jià)函數(shù)是:
2.2 基于RLS的自適應(yīng)均衡算法
RLS算法[3]所采用的準(zhǔn)則是最小二乘準(zhǔn)則,其代價(jià)函數(shù)為:
3 仿真結(jié)果分析
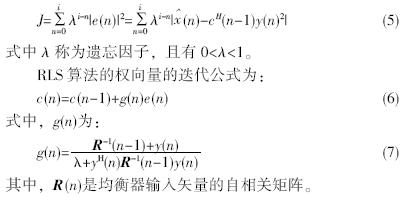
為了更直觀地描述,考慮一個(gè)線性自適應(yīng)均衡器。隨機(jī)數(shù)據(jù)產(chǎn)生雙極性的隨機(jī)序列x[n],它隨機(jī)地取+1和-1。隨機(jī)信號(hào)通過(guò)一個(gè)信道傳輸,信道性質(zhì)可由一個(gè)三系數(shù)FIR濾波器刻畫(huà),濾波器系數(shù)分別是0.3、0.9、0.3。在信道輸出加入方差為σ平方的高斯白噪聲,設(shè)計(jì)一個(gè)有11個(gè)權(quán)系數(shù)的FIR結(jié)構(gòu)的自適應(yīng)均衡器,令均衡器的期望響應(yīng)為x[n-7],選擇幾個(gè)合理的白噪聲方差σ平方。
采用基于LMS和RLS的自適應(yīng)均衡算法分別進(jìn)行實(shí)驗(yàn),畫(huà)出一次實(shí)驗(yàn)的誤差平方的收斂曲線,給出最后設(shè)計(jì)濾波器系數(shù)。一次實(shí)驗(yàn)的訓(xùn)練序列長(zhǎng)度為500。進(jìn)行20次獨(dú)立實(shí)驗(yàn),畫(huà)出誤差平方的收斂曲線。采用基于LMS的自適應(yīng)均衡算法,在相同信噪比,忘卻因子分別為μ=1.5、μ=1和μ=0.4的情況下,20次實(shí)驗(yàn)誤差平方的值曲線分別如圖2、圖3和圖4所示。采用RLS法,在相同信噪比,忘卻因子分別為μ=1、μ=0.8和μ=0.6的情況下,20次實(shí)驗(yàn)誤差平方的均值曲線分別如圖5、圖6和圖7所示。
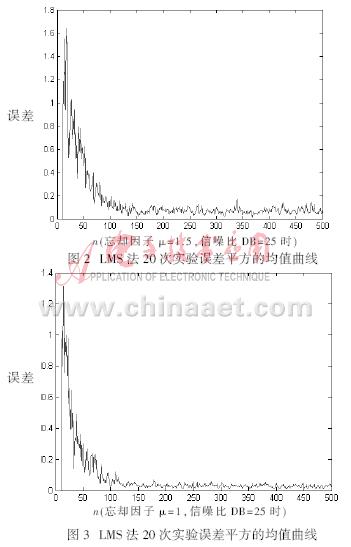
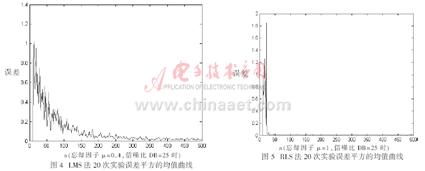
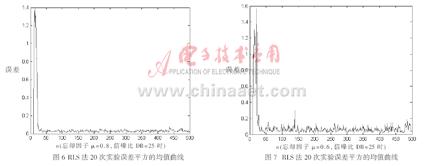
通過(guò)上述仿真結(jié)果可以看出,觀察三個(gè)不同步長(zhǎng)情況下的平均誤差曲線,步長(zhǎng)越小,平均誤差越小,但收斂速度越慢,為了好的精度,必然犧牲收斂速度。RLS算法的收斂速度明顯比LMS算法快,并且誤差也比LMS算法小。當(dāng)忘卻因子趨于0時(shí),RLS算法也就是LMS算法。
通過(guò)仿真可以看出相同忘卻因子下,RLS算法的收斂速度明顯比LMS算法快,并且誤差也比LMS算法小。當(dāng)忘卻因子趨于0時(shí),RLS算法也就是LMS算法。LMS和RLS都還有很多改進(jìn)的算法,進(jìn)一步的工作就是繼續(xù)分析這些算法,并且不斷完善系統(tǒng)模型。
-
濾波器
+關(guān)注
關(guān)注
161文章
7862瀏覽量
178936 -
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4780瀏覽量
101175 -
仿真
+關(guān)注
關(guān)注
50文章
4124瀏覽量
133997
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
變步長(zhǎng)LMS自適應(yīng)濾波算法及其分析
遞推最小二乘算法自適應(yīng)均衡器
采用ARM7的自適應(yīng)均衡器怎么設(shè)計(jì)?
如何提高自適應(yīng)均衡器的性能?
自適應(yīng)電纜均衡器CLC014原理、特點(diǎn)與應(yīng)用
基于LMS與RLS算法的自適應(yīng)均衡器性能研究
基于LMS與RLS算法的自適應(yīng)均衡器性能研究
光纖信道自適應(yīng)均衡器的仿真研究
基于Harr小波的均衡器結(jié)構(gòu)

基于LMS算法與RLS算法的自適應(yīng)濾波

信道均衡技術(shù)與基于FPGA的自適應(yīng)均衡器的研究與設(shè)計(jì)
FTN系統(tǒng)中兩種頻域迭代分組判決反饋均衡器仿真分析

使用FPGA實(shí)現(xiàn)的判決反饋均衡器結(jié)構(gòu)詳細(xì)資料說(shuō)明
基于LMS算法的自適應(yīng)均衡器的設(shè)計(jì)與實(shí)現(xiàn)
基于FPGA的自適應(yīng)均衡器的研究與設(shè)計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論