 在LPC2131微控制器外部實現CAN總線通信設計
在LPC2131微控制器外部實現CAN總線通信設計
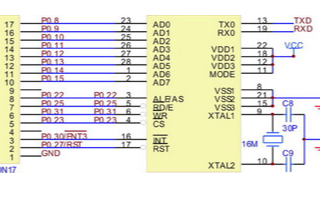
Philips公司的LPC213l是基于ARM7TDMI-S的高性能32位RISC微控制器。它具有ARM處理器的所有優點——低功耗、高性能和較為豐富的片上資源,但LPC2131內部沒有集成CAN控制器,而無法利用CAN總線來進行通信。為了使得LPC2131能夠利用CAN總線進行通信,可以通過外部擴展來實現其功能。目前,比較普通的方法是在LPC2131的外部采用CAN控制器設計CAN總線接口。LPC2131與CAN控制器的接口電路如圖1所示。
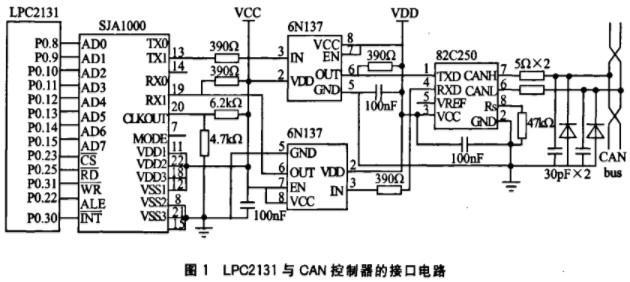
這種方法中,LPC2131是通過GPIO口與CAN控制器SJA1000相連實現數據交互的。LPC2131通過寄存器IOSET/IOCLR來設定I/O口的高/低狀態,雖然可以同時置位/拉低選定的引腳,但不能同時將某些口線拉高而將某些口線拉低。假定P0[15:8]初始狀態為0xa5,若將P0[15:8]同時變為0x5a,則必須通過IO0SET和IO0CLR兩次進行。程序實現如下:
PINSEL0=0x00000000;
IO0DIR=0x0000FF00;
IO0SET=0x5a00;
IO0CLR=0xa500;
P0[15:8]上會出現0xFF的中間狀態。在高速通信系統中,這些中間狀態可能會造成損失。雖然可以通過IO0PIN進行操作來消除這樣的中間狀態,但是Philips公司不推薦這種做法,非必要時盡量不要使用。
CAN驅動器接口芯片與LPC2131的串口接口電平上是相互匹配的,因此理論上可以將二者直接連接,采用串行通信方式實現。采用CAN總線通信,在長距離通信時,CAN總線兩端要加終端電阻。其作用是避免數據傳輸又反射回來,產生反射波而使數據遭到破壞;同時,能提高總線傳輸的抗干擾能力。理論上,在每個接收數據信號的中點進行采樣時,只要反射信號在開始采樣時衰減到足夠低就可以不考慮匹配。通常判斷原則是根據數據速率和電纜長度進行匹配的,但這在實際中難以掌握,一般都是依據經驗進行設計。
可編程邏輯器件(PLD)是20世紀70年代在ASIC設計的基礎上發展起來的一種新型邏輯器件。20世紀80年代末,美國Altera和Xilinx公司分別推出大規模和超大規模的復雜可編程邏輯器件(CPLD)及現場可編程邏輯門陣列器件(FPGA)。自從進入20世紀90年代以來,可編程邏輯器件得到了飛速發展,向高度集成、高速度和低價位方向不斷邁進;其應用領域不斷擴大,可用于狀態機、同步、譯碼、解碼、計數、總線接口和串并轉換等很多方面。使用CPLD可以提高系統集成度,降低噪聲,增強系統可靠性并降低成本。
CPLD技術的出現,為我們提供了一種有效的解決辦法:在CAN驅動器接口與LPC2131之間接一塊CPLD,對CPLD進行功能編程,使其負責串行總線的數據傳輸和防止CAN發送反射。
選擇Altera公司MAX3000A系列的型號為EPM3128ATC100-7(簡稱“EPM3128”)的CPLD芯片。此芯片兼容3.3 V和5 V的I/O 口。這樣,LPC2131、EPM3128和TJA1040在I/O電平上是相互匹配的。
1 EPM3128接口定義
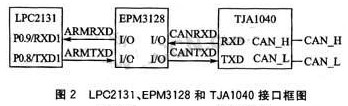
EPM3128設置成雙向串行總線通道。其中,2個I/O口被定義為CANRXD(IN)、CANTXD(OUT),分別連接CAN收發器TJA1040的RXD和TXD端,構成CAN總線上接收數據和發送數據通道;另外2個I/O口被定義為ARMRXD(IN)、ARMTXD(OUT),分別連接LPC2131的RXD1和TXD1端,構成處理器的串口接收數據和發送數據通道。整個數據的傳輸過程中,并不改變串行數據的協議和格式,接口電路全為TTL電平,期問不需要進行任何的處理。通信數據的校驗、報錯均交給通信兩端的處理器完成。LPC2131、EPM3128和TJA1040的接口框圖如圖2所示。
2 EPM3128功能實現
圖3是采用功能塊編程實現EPM3128的數據傳輸和屏蔽CAN發送反射的內部邏輯。圖中txArm2、rxCan2定義為輸入變量,分別對應外部的ARMTXD、CANRXD引腳;txCan2、rxArm2定義為輸出變量,分別對應外部的CANTXD、ARMRXD引腳。總線空閑時,總線上的狀態一直保持為“1”,即txArm2、rxCan2、txCan2、rxArm2的值全部為“1”。當輸入總線收到一個狀態“0”信號時,表示總線開始傳輸數據。如果LPC2131要發送數據,則LPC2131先向ARMTXD端口發送一個“0”起始信號,占據總線并在下一個時鐘開始發送數據幀;如果TJA1040從現場接收到新數據,則TJA1040先向CANRXD端口發送一個“0”起始信號,占據總線并在下一個時鐘開始發送數據幀。以此,完成正常通信過程中數據位從串口到串口的傳輸。
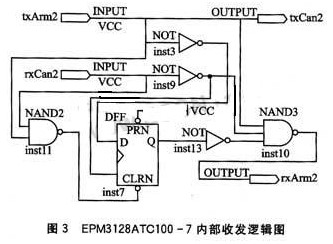
程序屏蔽CAN發送反射,就是屏蔽CAN總線接收到的從輸出總線上反射的“0”信號,因為接口從高阻態被喚醒是靠一個“0”的起始信號。如果LPC2131正在發送數據,此時輸人端口ARMTXD通過變量txArm2傳送一位為“0”的信號到變量txCan2,并從輸出口CANTXD送出。受總線輻射影響CANRXD輸入口會從CAN總線接收到一個“0”信號,并將“0”信號傳送給變量rxCan2,此時rXCan2收到的這個“0”信號是錯誤信號。經邏輯判斷,程序將變量rxArm2維持為1,端口ARMRXD仍保持高阻態“1”。反射的“0”信號雖然被接收到,但在CPLD內部被屏蔽處理掉。如果沒有屏蔽處理,那么這個錯誤的“0”信號將接收總線從高阻態喚醒,直接影響數據的通信。程序中D觸發器的用途有兩方面:一是緩存輸入和輸出,平滑信號的毛刺;二是實現控制信號的功能,如輸出的復位和同步等。
用QuartusII軟件編譯程序,并用仿真工具仿真。如圖4所示,波特率為115 200 bps,編輯輸入點txArm2、rxCan2的波形,查看輸出點txCan2、rxArm2的波形。為方便識圖,仿真中將數據端口傳輸占用的時間參數置0。
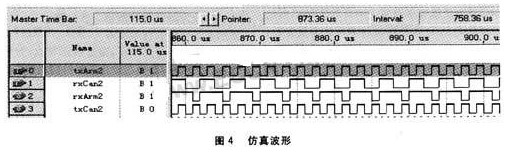
首先,論證輸出波形的有效性。觀察圖4中的txCan2和rxArm2的波形,可以看出所有時刻的數值都是確定的,從而證明系統處于穩定狀態,波形是有效的。
然后,論證輸出波形的邏輯性。根據程序的邏輯設計,txArm2通道的數據發送享有優先權,始終保持txCan2=txArm2。從仿真結果可以看出,txCan2的波形與txArm2波形完全一致;當txArm2通道為“0”時,屏蔽rxCan2輸入的數據,并保持rxArm2輸出一直為“1”,觀察圖4中任何時刻所有輸入/輸出的波形,可以看出仿真結果正確。
最后,驗證輸出波形的時序性。這部分程序是一個組合邏輯的設計,也就是所有的輸出隨著相應的輸入的變化而變化。由圖4可知,仿真結果的時序正確。
結 語
本文基于CPLD技術實現了LPC2131與CAN總線之間的串行通信。該方法實現簡單,并且穩定性較好,適合于采用CAN總線的多路串行通信系統。該技術已應用到實際中,接受實踐的檢驗。
-
cpld
+關注
關注
32文章
1257瀏覽量
169636 -
CAN總線
+關注
關注
145文章
1955瀏覽量
131098 -
微控制
+關注
關注
1文章
51瀏覽量
14525
發布評論請先 登錄
相關推薦
基于LPC2131處理器和SJA1000芯片實現CAN通信系統的設計
LPC2131 PHILIPS單片16/32位微控制器
proteus仿真lpc2131驅動lcd1602
基于lpc2131的在ucosII下的模擬MP3播放器實驗,資料求助
單片機LPC2131相關資料分享
LPC2131/2132/2134/2136/2138 da
應用LPC2131開發PLC調速器測頻單元

基于LPC2131嵌入式系統μCOS-II實現CAN通訊

LPC2131到LPC2138系列單芯片微控制器的數據手冊免費下載
LPC2131和LPC2132及LPC2138的數據手冊和使用指南資料免費下載
基于LPC2292微控制器和CAN控制器實現車輛行駛監控系統的設計






 工商網監
工商網監
評論