") 采用模糊自適應(yīng)PID控制算法的空氣壓縮機(jī)防喘振控制系統(tǒng)
采用模糊自適應(yīng)PID控制算法的空氣壓縮機(jī)防喘振控制系統(tǒng)
1.壓縮機(jī)喘振產(chǎn)生原因
喘振是壓縮機(jī)固有的一種現(xiàn)象。發(fā)生喘振的原因有很多,不僅與其進(jìn)出口流量有關(guān),還與壓縮機(jī)負(fù)荷,被壓縮氣體的分子量、溫度、壓力及管網(wǎng)容量有關(guān)。喘振發(fā)生的頻率與壓縮機(jī)管網(wǎng)的容量有關(guān),管容越大,發(fā)生喘振的頻率就越低;反之,頻率越高。但其產(chǎn)生的主要原因還是因?yàn)閴嚎s機(jī)工作流量小于最小流量。
在壓縮機(jī)的運(yùn)行過程中,如果其吸入量減少到一定值,壓縮比下降,輸出管線中氣體壓力高于壓縮機(jī)出口壓力,被壓縮了的氣體很快倒流入壓縮機(jī),待管線壓力下降后,氣體流動方向又反過來。此時(shí),其吸入流量和出口壓力周期性低頻率大幅度波動,周而復(fù)始,產(chǎn)生喘振,引起壓縮機(jī)軸位移,使軸產(chǎn)生彎曲造成機(jī)組振動加大,并波及到相鄰的管網(wǎng),喘振強(qiáng)烈時(shí),能使壓縮機(jī)遭到嚴(yán)重破壞。
2.傳統(tǒng)控制方案中存在的問題
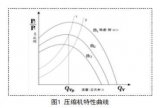
根據(jù)壓縮機(jī)的主要原因,為不使壓縮機(jī)出現(xiàn)喘振,需要保證在任何轉(zhuǎn)速下,通過壓縮機(jī)的實(shí)際流量都不小于喘振極限所對應(yīng)的最小流量。在生產(chǎn)負(fù)荷下降時(shí),須將部分出口氣體經(jīng)旁路返回到入口或?qū)⒉糠殖隹跉怏w放空,保證系統(tǒng)工作在穩(wěn)定區(qū)。目前工業(yè)生產(chǎn)上主要采用固定極限流量控制方案和可變極限流量控制方案。如圖1所示為壓縮機(jī)特性曲線1為喘振極限曲線,曲線2為防安全操作線。
在采用固定極限防喘振控制時(shí),即決定了它只是為防喘振為目的,而不是根據(jù)工藝狀況調(diào)整負(fù)荷的大小,一般適用于定轉(zhuǎn)速或轉(zhuǎn)速變化范圍較小的機(jī)組。如果在機(jī)組轉(zhuǎn)速較低的范圍運(yùn)行,會造成流量裕度過大,能量浪費(fèi)嚴(yán)重,不利于節(jié)能。而可變極限流量控制是建立一條安全操作控制線,留有一定的安全裕度。固定極限流量控制和可變極限流量控制都是不精確的近似方法通常都是提供一個很大的額外安全空間,保證機(jī)組在不理想的工況下運(yùn)行,這種額外安全空間可能導(dǎo)致壓縮機(jī)過多回流,降低了效率。
3.防喘振控制算法
由于固有的穩(wěn)定性限制,比例積分控制器不能很快的響應(yīng)工作點(diǎn)向控制線的移動,不足以防止喘振,除非安全裕量非常大。為了滿足生產(chǎn)需要,就必須對其進(jìn)行改進(jìn)以滿足實(shí)時(shí)的變化情況。
模糊自適應(yīng)整定PID控制。為了克服傳統(tǒng)PID的控制缺陷,將模糊控制與PID控制相結(jié)合會大大提高控制系統(tǒng)的性能。運(yùn)用模糊數(shù)學(xué)的基本理論和方法,把規(guī)則的條件、操作用模糊集表示,并把這些模糊控制規(guī)則及有關(guān)信息(如評價(jià)指標(biāo)、初始PID參數(shù)等)作為知識存入計(jì)算機(jī)知識庫中,然后計(jì)算機(jī)根據(jù)控制系統(tǒng)的實(shí)際響應(yīng)情況(專家系統(tǒng)的輸入條件),運(yùn)用模糊推理,即可自動實(shí)現(xiàn)對PID參數(shù)的最佳調(diào)整,這就是模糊自適應(yīng)PID控制。
自適應(yīng)模糊PID控制器以誤差e和誤差變化ec作為輸入,可以滿足不同時(shí)刻的e和ec對PID參數(shù)自整定的要求。利用模糊控制規(guī)則在線對PID參數(shù)進(jìn)行修改,便構(gòu)成了自適應(yīng)模糊PID控制器,其結(jié)構(gòu)如圖2所示。
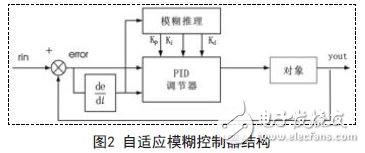
PID參數(shù)模糊自整定是找出PID三個參數(shù)與e和ec之間的模糊關(guān)系,在運(yùn)行中通過不斷檢測e和ec,根據(jù)模糊控制原理來對三個參數(shù)進(jìn)行在線修改,以滿足不同e和ec時(shí)對控制參數(shù)的不同要求,而使被控對象有良好的動、靜態(tài)性能。模糊控制設(shè)計(jì)的核心是總結(jié)工程設(shè)計(jì)人員的技術(shù)知識和實(shí)際操作經(jīng)驗(yàn),建立合適的模糊規(guī)則表。
Kp,ki,kd的模糊控制規(guī)則表建立好后,可根據(jù)如下方法進(jìn)行Kp,ki,kd的自適校正。
將系統(tǒng)誤差e和誤差變化率ec變化范圍定義為模糊集上的論域。其模糊子集為e , e c ={NB,NM,NS,O,PS,PM,PB},子集中元素分別代表負(fù)大,負(fù)中,負(fù)小,零,正大,正中,正小。設(shè)e,ec和Kp,ki,kd均服從正態(tài)分布,因此可得出各模糊子集的隸屬度,根據(jù)各模糊子集的隸屬度賦值表和各參數(shù)模糊控制模型,應(yīng)用模糊合成推理設(shè)計(jì)PID參數(shù)的模糊矩陣表,查出修正參數(shù)帶入下列計(jì)算:

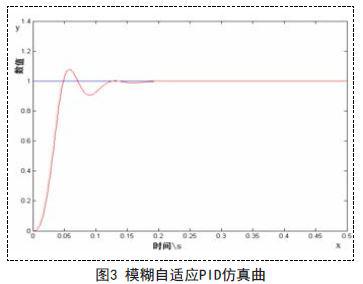
在線運(yùn)行過程中,控制系統(tǒng)通過對模糊邏輯規(guī)則的結(jié)果處理、查表和運(yùn)算,完成對PID參數(shù)的在線自校正。如圖3所示即為基于常規(guī)傳遞函數(shù)的模糊自適應(yīng)PID仿真曲線。
4.結(jié)束語
本文介紹了當(dāng)前現(xiàn)有的幾種防喘振控制方法,指出了個別方案存在的問題,并提出了一種全新的防喘振控制算法-基于模糊自適應(yīng)PID控制。從仿真圖形看出其可以完成系統(tǒng)的實(shí)時(shí)控制,計(jì)算機(jī)可以根據(jù)現(xiàn)場的實(shí)際情況能自動的調(diào)整PID的參數(shù),大大提高了系統(tǒng)的效率。由于喘振是壓縮機(jī)本身所固有的特性,影響喘振的因素又較多,所以不能僅僅局限在某個控制層面上,必須根據(jù)整個工藝流程進(jìn)行整體的衡量,同時(shí)應(yīng)用先進(jìn)的智能控制元件,這樣才能保證壓縮機(jī)的安全、平穩(wěn)高效的運(yùn)行。
-
控制器
+關(guān)注
關(guān)注
112文章
16445瀏覽量
179447 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6658瀏覽量
110886 -
壓縮機(jī)
+關(guān)注
關(guān)注
11文章
677瀏覽量
79455
發(fā)布評論請先 登錄
相關(guān)推薦
壓力傳感器在工業(yè)空氣壓縮機(jī)中的應(yīng)用
一個可以控制空氣壓縮機(jī)開關(guān)的板
空氣壓縮機(jī)站遠(yuǎn)程監(jiān)控系統(tǒng)的研究與實(shí)現(xiàn)
基于PLC在礦山空氣壓縮機(jī)控制系統(tǒng)中的應(yīng)用
基于51單片機(jī)的空氣壓縮機(jī)控制器
空氣壓縮機(jī)防喘振控制系統(tǒng)的控制方案分析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論