") MEMS動態(tài)測試系統(tǒng)的組成和關(guān)鍵測量技術(shù)的研究
MEMS動態(tài)測試系統(tǒng)的組成和關(guān)鍵測量技術(shù)的研究
隨著微電機(jī)系統(tǒng)(MEMS)技術(shù)的迅速發(fā)展,對MEMS器件性能的研究,特別是對其機(jī)械動態(tài)特性的測試,正成為一個越來越引人注目的課題。
MEMS器件本身的微小尺寸和高頻特性,決定了傳統(tǒng)的壓電、應(yīng)變等接觸式測量方法無法勝任測量。而掃描電子顯微鏡和原子力顯微鏡等昂貴的微觀測試設(shè)備也無法實現(xiàn)動態(tài)測試的要求。鑒于MEMS動態(tài)特性測試的復(fù)雜性和特殊性,開發(fā)新型的基于光學(xué)非接觸式測量的儀器也越來越重要。其中頻閃視覺測量和頻閃干涉測量代表了目前最先進(jìn)的MEMS動態(tài)測試技術(shù)。美國加州大學(xué)伯克利分校的傳感器和執(zhí)行器中心開發(fā)了頻閃顯微干涉系統(tǒng),使用頻閃成像和干涉相移的技術(shù),可實現(xiàn)納米精度的平面和離面運(yùn)動測量。美國麻省理工學(xué)院同樣開發(fā)了基于機(jī)器視覺和干涉測量的測試系統(tǒng),還研制了計算機(jī)微視覺系統(tǒng),并對兩者進(jìn)行了比較,其系統(tǒng)能夠測量周期重復(fù)運(yùn)動過程,平面運(yùn)動測量精度優(yōu)于5 nm。國內(nèi),天津大學(xué)開發(fā)了基于計算機(jī)視覺的MEMS測試系統(tǒng),通過模糊圖像合成等技術(shù),和引入Mirau干涉儀來實現(xiàn)MEMS器件的測量。華中科技大學(xué)機(jī)械學(xué)院微系統(tǒng)研究中心開發(fā)了MEMS三維靜動態(tài)測試系統(tǒng),集成了頻閃成像和顯微干涉技術(shù),可進(jìn)行MEMS三維靜動態(tài)特性的測量。
本文基于自動調(diào)焦顯微視覺的MEMS動態(tài)測試系統(tǒng),通過采集MEMS器件顯微視覺圖像,利用平面亞像素運(yùn)動位移算法和焦平面的定位,實現(xiàn)對被測MEMS器件平面和離面運(yùn)動的測試。本文將介紹基于自動調(diào)焦顯微視覺的MEMS動態(tài)測試系統(tǒng)的系統(tǒng)組成及其關(guān)鍵的測量技術(shù)和數(shù)據(jù)處理算法,并對系統(tǒng)驗證實驗的數(shù)據(jù)進(jìn)行了分析。
1 系統(tǒng)設(shè)計與組成
系統(tǒng)由光學(xué)顯微鏡、自動調(diào)焦系統(tǒng)、三維精密工作臺、MEMS器件激勵、頻閃照明成像系統(tǒng)和計算機(jī)控制及集成測試軟件組成,圖1為系統(tǒng)結(jié)構(gòu)圖。
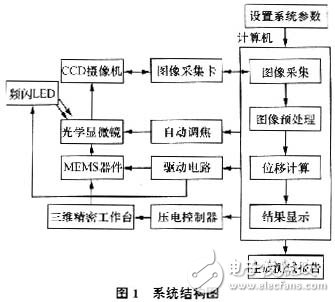
整個系統(tǒng)放置在氣浮隔振臺上,以隔絕外界振動對測試的干擾。在平面運(yùn)動測量時,MEMS器件置于三維精密工作臺上,通過計算機(jī)控制步進(jìn)電機(jī)進(jìn)行自動調(diào)焦,使得被測MEMS器件成像于焦平面附近,此時CCD攝像機(jī)就獲取了MEMS器件經(jīng)顯微鏡放大后清晰的視覺圖像。模擬輸出卡輸出的周期信號經(jīng)功率放大后激勵MEMS器件,使其作周期性運(yùn)動。同時模擬輸出卡輸出同頻的脈沖信號驅(qū)動頻閃光源,利用頻閃成像技術(shù)拍攝MEMS器件在高頻運(yùn)動下“凍結(jié)”的圖像。通過調(diào)整頻閃驅(qū)動信號和MEMS器件激勵信號之間的相差,可拍攝運(yùn)動周期內(nèi)不同時刻不同位置的圖像。對采集的圖.像使用亞像素運(yùn)動位移算法計算不同時刻的相對位移,即可獲得被測MEMS器件在運(yùn)動周期內(nèi)不同時刻的平面位移。在離面運(yùn)動測量中,利用三維精密工作臺的z向移動實現(xiàn)自動調(diào)焦,對MEMS器件運(yùn)動周期內(nèi)每一時刻的焦平面位置進(jìn)行準(zhǔn)確定位,焦平面之間的位置差即為不同時刻MEMS器件離面運(yùn)動相對位移。通過對平面運(yùn)動和離面運(yùn)動的描述,最終可獲取被測MEMS器件三維的機(jī)械動態(tài)特性參數(shù)。
MEMS動態(tài)測試系統(tǒng)是一個典型的光機(jī)電集成系統(tǒng),為保證系統(tǒng)的靈活性和擴(kuò)充性,滿足自動化測試的要求,總體上采用虛擬儀器結(jié)構(gòu),采用LABVIEW來架構(gòu)軟件平臺。軟件平臺的主要功能為:設(shè)置系統(tǒng)參數(shù)(激勵頻率、輸出相移、同步參數(shù)等)、實現(xiàn)自動調(diào)焦、采集MEMS器件圖像、對圖像進(jìn)行預(yù)處理(去噪,校正)、圖像分析處理獲取三維運(yùn)動特性、誤差分析、生成測試報告和圖形界面顯示。
2 關(guān)鍵技術(shù)與數(shù)據(jù)處理算法
2.1 頻閃成像原理
在MEMS動態(tài)測試過程中,由于MEMS器件的運(yùn)動頻率都比較高,一般在1 kHz到l MHz之間。在本系統(tǒng)中引入頻閃成像技術(shù)以實現(xiàn)測試目的。
頻閃成像技術(shù)是在一定頻率快速閃動的光源照明下觀測高速旋轉(zhuǎn)或運(yùn)動的物體,當(dāng)頻閃光源的閃動頻率嚴(yán)格與被測物體的轉(zhuǎn)動或運(yùn)動速度相等或者是其整數(shù)倍時,所看到物體是相對靜止的。這種視覺暫留現(xiàn)象,稱為“頻閃效應(yīng)”。頻閃效應(yīng)能夠直接觀測高速運(yùn)動物體的運(yùn)行狀況,使一些不可見的現(xiàn)象“可見”。
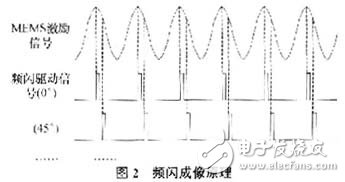
圖2所示為頻閃成像原理在本系統(tǒng)中的應(yīng)用,即以一定頻率的信號激勵MEMS器件,并使用同頻小占空比脈沖驅(qū)動頻閃光源,這樣在CCD攝像機(jī)的曝光時間里,器件被照明的時間非常短,剩下的絕大部分時間器件沒有光源照明,處于暗場狀態(tài),攝像機(jī)的感光面只在光照的那段時間內(nèi)產(chǎn)生光積分。當(dāng)照明時間足夠短時,可以認(rèn)為拍攝到的是MEMS器件在這段時間內(nèi)被“凍結(jié)”的圖像,運(yùn)動位移限制在很小的范圍內(nèi),甚至認(rèn)為基本沒有運(yùn)動,得到器件高速運(yùn)動中某個相位上的圖像。通過調(diào)整頻閃光源驅(qū)動信號和MEMS器件激勵信號之間的相差,即可獲得被測MEMS器件在每個運(yùn)動位置上的圖像。根據(jù)其原理,頻閃成像需要MEMS器件作周期運(yùn)動或可重復(fù)的瞬時運(yùn)動;并且為了準(zhǔn)確描述器件的運(yùn)動,需要精密控制MEMS激勵信號和頻閃驅(qū)動信號之間的同步和相移。
2.2 平面運(yùn)動位移算法
為了從MEMS器件視覺圖像中估計平面剛體運(yùn)動,需要利用一定的數(shù)字圖像處理技術(shù)來提取其運(yùn)動位移。在實際應(yīng)用中,整像素的位移是很容易獲得的。但是實際的位移值一般不恰好為整像素,為提高數(shù)字圖像相關(guān)方法的測量精度,在本系統(tǒng)中,使用數(shù)字圖像相關(guān)求出像素級的位移再對其所得的相關(guān)系數(shù)進(jìn)行二次曲面擬合的方法求取亞像素位移,具有抗噪能力強(qiáng)、計算量小、精度高等優(yōu)點。
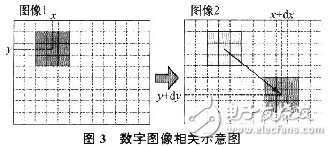
數(shù)字圖像相關(guān)是對運(yùn)動序列圖像做相關(guān)求運(yùn)動位移的方法。如圖3所示,在圖像1中選取(MN)大小的模板A,在圖像2上模板位置(x,y)周圍設(shè)定的計算窗口中移動,并按一定的相關(guān)函數(shù)與模板所覆蓋的區(qū)域計算相關(guān)系數(shù),尋找與模板匹配后相關(guān)系數(shù)值最大的位置。在這里選用效果較好的標(biāo)準(zhǔn)化協(xié)方差相關(guān)函數(shù),

其取值范圍為[-1,1]。其中:A(m,n)、B(m+i,n+j)分別為圖像1中選取的模板的灰度分布和圖像2上被移動的模板所覆蓋到的區(qū)域的灰度分布,A、B為其平均灰度值。計算后在圖像2上找到相關(guān)系數(shù)R最大的位置(x+dx,y+dy),所得的dx、dy即為像素級的運(yùn)動位移。
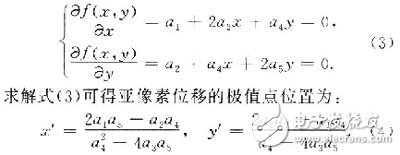
對數(shù)字圖像相關(guān)獲取的像素級位移再通過相關(guān)系數(shù)曲面擬合的方法來求取亞像素位移。本文采用如下的二元二次多項式來擬合相關(guān)函數(shù)曲面。對像素級位移搜索到的位置(x+dx,y+dy)及其周圍相鄰的8個點用下面的二元二次函數(shù)來表示:

這里共有ao,…,a5 6個待定系數(shù),而33的擬合窗口有9個方程,因此可以使用最小二乘法來求解。函數(shù)f(x,y)在擬合曲面的極值點應(yīng)滿足以下方程組:
2.3 自動調(diào)焦
對MEMS器件進(jìn)行離面運(yùn)動測試時,需要在每個“凍結(jié)”的運(yùn)動位置上采用自動調(diào)焦技術(shù)來獲取準(zhǔn)確的焦平面位置以確定其相對運(yùn)動位移。系統(tǒng)采用基于數(shù)字圖像處理的方法進(jìn)行自動調(diào)焦,對采集到的圖像做去噪濾波的預(yù)處理,確定一個合理可靠的評價函數(shù),根據(jù)該評價函數(shù)判斷試樣是否對焦,并判斷離焦方向,向機(jī)電驅(qū)動系統(tǒng)發(fā)送調(diào)焦信號,帶動被測MEMS器件運(yùn)動,達(dá)到自動調(diào)焦的目的。
基于數(shù)字圖像處理方法的自動調(diào)焦最重要的就是尋找調(diào)焦評價函數(shù),該判據(jù)應(yīng)該具有無偏性、單峰性,且最好能反應(yīng)離焦極性、信噪比等特性。在本系統(tǒng)中,為了提高運(yùn)算速度,在圖像內(nèi)選取一塊矩形區(qū)域(ROI,region ofinterest),檢測其邊緣的清晰度,計算它的梯度判別函數(shù)G(ROI)。計算表達(dá)式如下:

其中:S(i,j)為選取區(qū)域的光強(qiáng)值矩陣,M、N為矩陣的行和列。求解G(ROI)是對選取區(qū)域計算x和y向梯度,并對其平方相加,這相當(dāng)于增加了高頻分量的權(quán)重。
為兼顧調(diào)焦范圍、調(diào)焦準(zhǔn)確性和調(diào)焦速度的要求,本系統(tǒng)采用粗精結(jié)合的調(diào)焦策略。先用步進(jìn)電機(jī)進(jìn)行快速、粗略的焦平面位置搜索,并在搜索到的最佳點附近使用精密工作臺的小步距z向移動進(jìn)行高精度的定位,實現(xiàn)自動調(diào)焦的目的。
3 系統(tǒng)驗證實驗
3.1 平面運(yùn)動測量驗證
本實驗通過測量裝夾在高精度壓電工作臺上的微加速度計的微小移動來驗證平面內(nèi)位移算法的精度。CCD攝像機(jī)選用Sony公司的XC-ST50,像素數(shù)為768×494,每個像素的大小8.4 μm×9.8 μm,信噪比60 dB;圖像采集卡選用NI公司的PCI-1409,10位灰度量化;顯微鏡物鏡的放大倍數(shù)為25倍;此時CCD上每個像素對應(yīng)于視場中336 nm×392 nm大小的區(qū)域。三維壓電工作臺選用德國PI公司的P517.3CL,其x、y向的位移分辨率為1 nm,全程重復(fù)定位精度為±5 nm,行程為100 μm×100μm;由工作臺定位引起的誤差小于0.015個像素。圖4為為驗結(jié)果。
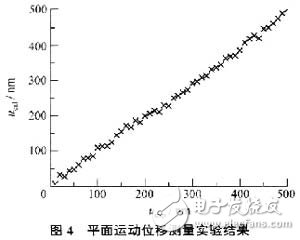
進(jìn)行10次實驗,每次實驗中以10 nm的間隔測試50個點。通過比較,壓電工作臺的位移值和亞像素運(yùn)動檢測算法計算得到的位移值在數(shù)值上非常接近,10次實驗的標(biāo)準(zhǔn)差的均值為0.0213,即測量精度達(dá)到l/50個像素。根據(jù)本系統(tǒng)中放大后的像素單元尺寸,采用數(shù)字圖像相關(guān)和相關(guān)系數(shù)曲面擬合的方法可以實現(xiàn)7.2 nm×8.3 nm的平面運(yùn)動位移測量精度。
3.2 離面運(yùn)動測量驗證
對被測MEMS器件進(jìn)行自動調(diào)焦實驗,以驗證調(diào)焦算法和方案的可行性和性能。自動調(diào)焦采用粗精結(jié)合的方案;粗調(diào)裝置選用步進(jìn)電機(jī),其步距角為1.8°,驅(qū)動器采用20細(xì)分,顯微鏡的粗調(diào)每周36 mm,所以每個步距![]()
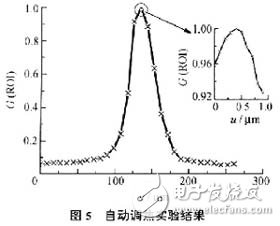
細(xì)調(diào)使用上述PI公司P517.3CL壓電工作臺的z向移動,z向位移分辨率為0.1 nm,全程重復(fù)定位精度為±l nm,行程為20μm。同樣使用上述的微加速度計作為測試器件,先使用步進(jìn)電機(jī)以9 μm的步距進(jìn)行快速搜索,在搜索所得的最佳點附近通過壓電工作臺z向運(yùn)動,以0.1 μm的步距進(jìn)行精確的焦平面定位。圖5為一次實驗結(jié)果。多次實驗結(jié)果表明,本系統(tǒng)的自動調(diào)焦系統(tǒng)有較高的重復(fù)精度,調(diào)焦精度可達(dá)±0.1 μm。
4 結(jié) 論
本文介紹了基于自動調(diào)焦顯微視覺的MEMS動態(tài)測試系統(tǒng)的系統(tǒng)組成和關(guān)鍵測量技術(shù)。通過結(jié)合頻閃成像、計算機(jī)視覺和自動調(diào)焦等技術(shù),可以實現(xiàn)對MEMS器件的運(yùn)動測量。并且使用了平面亞像素位移算法和粗精結(jié)合的自動調(diào)焦方法,加快測試過程,提高測量精度。驗證性實驗結(jié)果表明,平面亞像素位移算法的匹配精度可達(dá)1/50個像素,平面運(yùn)動測量分辨率達(dá)到7.2 nm×8.3 nm;自動調(diào)焦過程迅速,焦平面定位精確,離面運(yùn)動測量分辨率達(dá)到0.1μm。
-
mems
+關(guān)注
關(guān)注
129文章
3958瀏覽量
191107 -
計算機(jī)
+關(guān)注
關(guān)注
19文章
7539瀏覽量
88643 -
機(jī)器視覺
+關(guān)注
關(guān)注
162文章
4406瀏覽量
120735
發(fā)布評論請先 登錄
相關(guān)推薦
MEMS發(fā)展迅猛,制定測量標(biāo)準(zhǔn)迫在眉睫
高速公路GPS車輛動態(tài)監(jiān)控技術(shù)研究
MEMS元器件的組成部分
MEMS開關(guān)技術(shù)基本原理
MEMS技術(shù)縮短了其與FOG和其它傳統(tǒng)慣性技術(shù)的性能差距
表面硅MEMS加工技術(shù)的關(guān)鍵工藝
RF-MEMS系統(tǒng)元件封裝問題
艦載無人機(jī)測控系統(tǒng)關(guān)鍵技術(shù)研究
什么是RF MEMS?有哪些關(guān)鍵技術(shù)與器件?
基于MEMS的姿態(tài)測量系統(tǒng)
RFID系統(tǒng)動態(tài)仿真測試技術(shù)的研究

降低成本提高效率 MEMS動態(tài)晶圓測試系統(tǒng)
MEMS和MR傳感器組成姿態(tài)測量系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論