") 衛(wèi)星+慣性導(dǎo)航模塊SKM-4DX的路測(cè)數(shù)據(jù)報(bào)告展示(公交導(dǎo)航測(cè)試篇)
衛(wèi)星+慣性導(dǎo)航模塊SKM-4DX的路測(cè)數(shù)據(jù)報(bào)告展示(公交導(dǎo)航測(cè)試篇)
衛(wèi)星+慣性導(dǎo)航模塊SKM-4DX的優(yōu)勢(shì)在于沒(méi)有衛(wèi)星信號(hào)隧道和地下車(chē)庫(kù)還能繼續(xù)為客戶(hù)提供位置信息,同時(shí)在樹(shù)木遮擋、城市峽谷,高架橋下面,衛(wèi)星定位偏移較大的地方,還能提供較為準(zhǔn)確的位置信息。同時(shí),衛(wèi)星+慣性導(dǎo)航模塊還能提供比衛(wèi)星定位更為準(zhǔn)確的速度信息,輸出衛(wèi)星定位無(wú)法輸出的車(chē)輛的角度姿態(tài)信息。
下面SKYLAB小編帶您一起看下衛(wèi)星+慣性導(dǎo)航模塊SKM-4DX的在公交車(chē)上的路測(cè)導(dǎo)航數(shù)據(jù)報(bào)告,有圖有真相!
GMOUSE測(cè)試環(huán)境
(1)將衛(wèi)星+慣性導(dǎo)航組合模塊SKM-4DX做成GMOUSE 粘貼在公安交車(chē)玻璃窗的外側(cè)。記錄慣導(dǎo)模塊輸出log信息。
GMOUSE的測(cè)試環(huán)境和所處環(huán)境信號(hào)質(zhì)量
(2)SKM-4DX在公交城市復(fù)雜環(huán)境路徑導(dǎo)航效果展示
無(wú)遮擋衛(wèi)星導(dǎo)航圖片
城市高架橋慣導(dǎo)圖片
城市高架橋慣導(dǎo)效果
樹(shù)木遮擋環(huán)境
(3)SKM-4DX在公交隧道導(dǎo)航效果展示
車(chē)輛進(jìn)入隧道的路徑
由于隧道中沒(méi)有衛(wèi)星信號(hào)所以手機(jī)上的導(dǎo)航,進(jìn)入隧道后無(wú)位置信息更新
車(chē)輛從隧道出來(lái)后路徑與隧道出口的偏差為8m, 計(jì)算其誤差距離—慣導(dǎo)距離之比為 8/1473,不到1%。
從測(cè)試報(bào)告可以看出,衛(wèi)星+慣性導(dǎo)航模塊SKM-4DX的表現(xiàn)是相當(dāng)不錯(cuò)的。下期SKYLAB小編將給您展示SKM-4DX在小轎車(chē)上路測(cè)導(dǎo)航數(shù)據(jù)。
-
慣導(dǎo)模塊
+關(guān)注
關(guān)注
1文章
8瀏覽量
3385
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
PNT、GNSS與GPS:衛(wèi)星定位導(dǎo)航技術(shù)的清晰區(qū)分

淺談慣性導(dǎo)航產(chǎn)品的對(duì)齊安裝角度
導(dǎo)航分析儀的技術(shù)原理和應(yīng)用場(chǎng)景
E108-GN系列GNSS多模衛(wèi)星導(dǎo)航定位模塊產(chǎn)品說(shuō)明
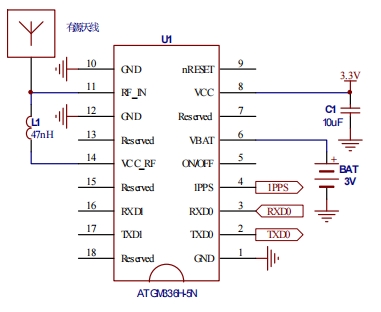
ATGM336H-5N杭州中科微BDS定位導(dǎo)航模塊規(guī)格參數(shù)
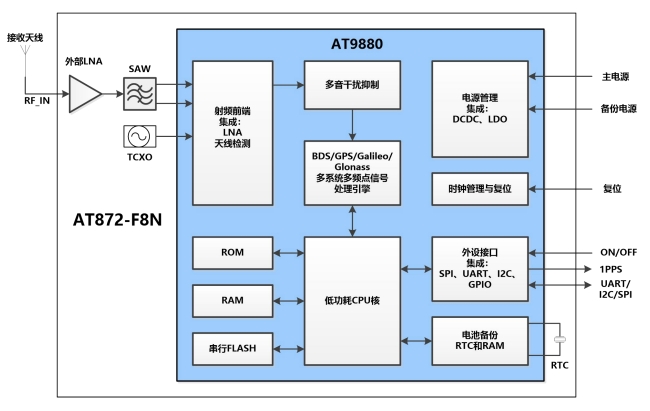
AT872-F8N高性能GNSS全模多頻定位導(dǎo)航模塊數(shù)據(jù)手冊(cè)
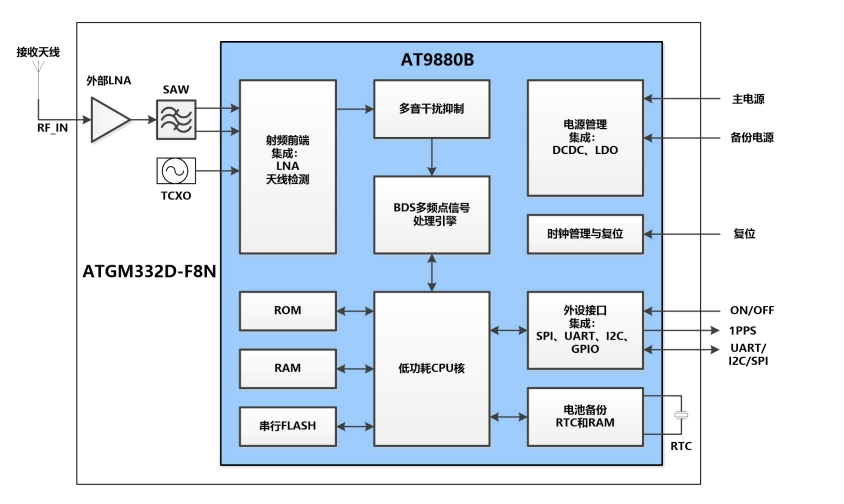
ATGM332D-F8N低功耗單北斗多頻定位導(dǎo)航模塊資料
北斗衛(wèi)星導(dǎo)航系統(tǒng)為全產(chǎn)業(yè)鏈賦能
車(chē)載微星導(dǎo)航芯片:AT6558R數(shù)據(jù)手冊(cè)解讀
AGV小車(chē)上的慣性導(dǎo)航模塊運(yùn)用——SGPM02

【行業(yè)前沿】量子技術(shù)+慣性導(dǎo)航,美國(guó)海軍研究實(shí)驗(yàn)室的最新研究成果
華測(cè)導(dǎo)航AA9激光航測(cè)系統(tǒng)正式發(fā)布!
PNT-SG3FS全球導(dǎo)航衛(wèi)星系統(tǒng)模塊數(shù)據(jù)表
導(dǎo)遠(yuǎn)科技在北京車(chē)展展示其自主研發(fā)的新一代MEMS慣性導(dǎo)航芯片

愛(ài)普生高精度慣性導(dǎo)航模塊賦能無(wú)人割草機(jī)新賽道






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論