") 自動駕駛為什么需要毫米波雷達
自動駕駛為什么需要毫米波雷達
隨著自動駕駛技術(shù)的發(fā)展,相關(guān)的毫米波雷達也得到了許多關(guān)注。毫米波雷達在自動駕駛領(lǐng)域,是與激光雷達LiDAR和攝像頭一樣極其重要的傳感器。同時,我們將會看到,毫米波雷達除了在無人駕駛中的應(yīng)用外,在機器人以及生物傳感領(lǐng)域也有很大潛力。
毫米波雷達在汽車領(lǐng)域其實已經(jīng)有多年應(yīng)用。汽車引入毫米波雷達最初主要是為了實現(xiàn)盲點監(jiān)測和定距巡航,而隨著技術(shù)的發(fā)展這兩個特性也漸漸從高端車專用普及到了幾乎所有車型。可以說汽車界對于毫米波雷達并不陌生,但是隨著最近自動駕駛概念的走紅,毫米波雷達在汽車領(lǐng)域的關(guān)注度獲得了極大提升。
為什么自動駕駛需要毫米波雷達?眾所周知,自動駕駛中與常規(guī)汽車中傳感器最大的不同是加入了LiDAR和攝像頭,LiDAR采用激光測距技術(shù)可以獲得汽車周圍空間的三維點云,實現(xiàn)環(huán)境建模;而攝像頭則幫助自動駕駛系統(tǒng)實現(xiàn)場景的語義化分割和理解。舉例來說,LiDAR可以檢測到前方若干米處有一個標牌,而攝像頭則可以幫助理解標牌上的內(nèi)容,是限速標志還是和駕駛無關(guān)的廣告等。
然而,LiDAR和攝像頭都使用了光波段的電磁波,這個波段的電磁波有一個特點就是透射和繞射性能都不好,因此一旦有遮擋就很難使用。因此,在雨天、霧天等場合,LiDAR和攝像頭幾乎就無法工作了,這時候為了能自動駕駛必須依靠毫米波雷達。毫米波雷達與LiDAR最大不同的地方就是毫米波波段的電磁波不會受到雨、霧、灰塵等常見的環(huán)境因素影響,在這些場景下都能順利工作,因此毫米波雷達可以說是自動駕駛穩(wěn)定工作的重要保障。
毫米波雷達無論對于奧迪這樣專注于L1-L3輔助駕駛的保守型車廠,還是對于Waymo,Uber這樣想一步到位實現(xiàn)L4-L5的激進型自動駕駛初創(chuàng)公司都有很重要的意義。對于傳統(tǒng)車廠來說,毫米波雷達在盲點監(jiān)測、定距巡航等原應(yīng)用上的一些漸進式擴展可以成為輔助駕駛(如自動換線)中的重要組成部分,而對于激進型自動駕駛初創(chuàng)公司來說高精度毫米波雷達則是其無人駕駛系統(tǒng)可靠性的重要保障,結(jié)合LiDAR和攝像頭做傳感器融合可以實現(xiàn)所有氣候環(huán)境下的自動駕駛,因此如果沒有毫米波雷達的話無人車恐怕都沒法真正上路。
毫米波雷達芯片發(fā)展趨勢
目前汽車領(lǐng)域的毫米波雷達主要基于FMCW技術(shù),即發(fā)射出調(diào)頻毫米波信號,并根據(jù)首發(fā)毫米波之間的頻率差來確定目標的位置以及相對速度。FMCW雷達關(guān)注的指標主要是目標區(qū)分度和測量分辨率,其中目標區(qū)分度指的是雷達能分辨的兩個物體之間的最小距離(如果兩個物體之間的距離小于該最小距離則會被雷達認為是一個物體),而測量分辨率則是絕對距離的測量精確度。
我們看到的毫米波雷達的第一個趨勢就是從24GHz頻段演進到77GHz頻段。根據(jù)美國FCC和歐洲ESTI的規(guī)劃,24GHz的寬頻段(21.65-26.65GHz)將在2022年過期,在之后汽車在24GHz能用的僅剩下24.05-24.25GHz范圍的窄帶頻譜。反之,在77GHz頻段,汽車雷達將能使用77-81GHz高達4GHz的帶寬。對于FMCW雷達來說,頻率掃描帶寬決定了目標區(qū)分度和測量分辨率,因此77GHz的FMCW雷達對于24GHz來說目標區(qū)分度和測量分辨率都有十多倍的提升。此外,F(xiàn)MCW雷達的相對速度測量精度與載波頻率有關(guān),77GHz頻段的速度測量精度會比24GHz要好數(shù)倍。最后,毫米波雷達系統(tǒng)的天線尺寸也隨著載波頻率上升而變小,所以77GHz波段的毫米波雷達系統(tǒng)尺寸會比24GHz更緊湊。
毫米波雷達走向77GHz頻段也給芯片設(shè)計帶來了挑戰(zhàn),隨著工作頻率的升高,發(fā)射功率、接收機噪聲、鎖相環(huán)噪聲等指標都變得更難滿足,同時在芯片封裝中的寄生參數(shù)也更加敏感,因此對于芯片設(shè)計團隊的技術(shù)水準提出了更高的要求。
第二個毫米波雷達芯片的重要趨勢是CMOS工藝成為主流。毫米波電路傳統(tǒng)的實現(xiàn)工藝是GaAs等III-V族工藝,但是III-V族工藝的成本過高,同時集成度低無法在芯片上集成數(shù)字模塊,因此SiGe這樣的工藝得到了不少應(yīng)用。而隨著CMOS工藝的特征尺寸不斷縮小,在28nm節(jié)點之后CMOS工藝已經(jīng)能基本勝任毫米波雷達的波段,因此毫米波雷達也就自然而然轉(zhuǎn)向CMOS工藝。CMOS工藝除了成本低之外,另一個重要特性是能夠集成數(shù)字電路,因此TI,NXP等在數(shù)字和模擬領(lǐng)域都有深厚積累的公司也就在他們的CMOS 77GHz雷達芯片中集成了MCU等額外數(shù)字模塊,從而讓雷達芯片的控制甚至數(shù)字信號處理能夠在本地完成而無需再配備專用的處理器,這樣就降低了系統(tǒng)復雜度和成本。
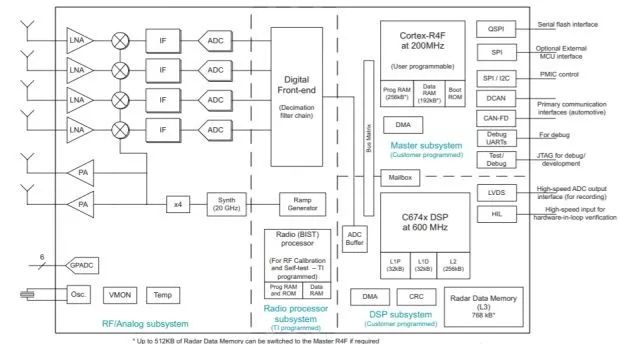
TI AWR1642 77GHz雷達芯片的架構(gòu)圖,其中除了雷達之外還包含了MCU以及DSP
第三個重要方向是毫米波雷達也在走向高分辨率。這里的分辨率不僅僅是目標測距的分辨率,更是指毫米波雷達的空間分辨率。盲點監(jiān)測等傳統(tǒng)汽車毫米波雷達應(yīng)用只需要雷達監(jiān)測在視野的一定距離中是否有物體即可,至于該物體是位于視野中的哪一個位置則并不關(guān)心。
在自動駕駛中則希望毫米波雷達能夠得到視野中目標的具體空間位置,形成類似LiDAR這樣的點云去做環(huán)境建模,甚至通過機器學習方法直接分析出雷達點云中每個點對應(yīng)的具體物體(是車輛還是行人),因此需要高分辨率毫米波雷達。為了實現(xiàn)高分辨率,毫米波雷達系統(tǒng)因此往往需要使用波束成形或MIMO等技術(shù)。在波束成形和MIMO技術(shù)中,必須使用多路雷達收發(fā)機。
波束成形系統(tǒng)示意圖,需要多路收發(fā)
為了提升波束成形和MIMO系統(tǒng)的方位精度,需要增加波束成形和MIMO系統(tǒng)中收發(fā)機的數(shù)量,因此目前在同一塊芯片中盡可能增加集成的收發(fā)機的數(shù)量就成了另一個技術(shù)進化方向,例如TI的AWR1243集成了3發(fā)(射機)4(接)收(機),NXP的MR3003集成了3發(fā)4收,而中國的初創(chuàng)公司加特蘭的Yosemite擁有4發(fā)8收。
最后必須指出的是,毫米波雷達在數(shù)字模塊集成度和收發(fā)機數(shù)量集成度上的取舍事實上對應(yīng)了兩種不同的自動駕駛技術(shù)方向。對于主要針對輔助駕駛的傳統(tǒng)車廠,其對于毫米波雷達的空間分辨率技術(shù)演化預期通常比較平穩(wěn),同時傳統(tǒng)車廠對于成本和雷達模組復雜度等較為敏感,所以較合適的選擇是更重視毫米波雷達上的數(shù)字模組集成度,能夠集成MCU、DSP甚至一些AI加速模組等,從而能在雷達本地完成大部分信號處理以及一些AI相關(guān)處理,并降低總體模組的復雜度。
TI、NXP等半導體老牌公司主要面對的就是這類市場,因此我們可以看到TI和NXP在努力推進集成了MCU和/或DSP的毫米波雷達,而對于收發(fā)機集成度則并不激進。另一方面,L4-L5自動駕駛更重視的是毫米波雷達對于空間的分辨率以獲取更高精度的點云,而對于毫米波雷達芯片上的數(shù)字模塊并不非常在乎,因為毫米波雷達的點云最終都會送到自動駕駛系統(tǒng)中的高算力處理器上去做傳感器融合,所以毫米波雷達芯片上是否有強大的數(shù)字處理能力并非關(guān)鍵。我們看到初創(chuàng)公司加特蘭選擇了在芯片上集成了更多收發(fā)機而非MCU/DSP(加特蘭的4發(fā)8收雷達芯片的收發(fā)機數(shù)量比起TI的3發(fā)4收和NXP的3發(fā)4收更多),這也更對激進自動駕駛公司的胃口。
毫米波雷達的其他應(yīng)用
毫米波雷達除了在汽車應(yīng)用之外,還有其他領(lǐng)域也有廣闊的應(yīng)用前景。
目前除了汽車之外預計最早會落地的應(yīng)用是工業(yè)機器人視覺。在機械臂等應(yīng)用場合,機器人必須能快速感知距離和前方障礙物,并作出實時響應(yīng)。這對于多機器人協(xié)作以及人機協(xié)作至關(guān)重要,否則機器人的安全性將無從得到保證。使用毫米波雷達的主要好處除了成本較LiDAR更低之外,就是其繞射透射能力強,可以non-line-of-sight完成感知,從而避免了諸多與視角有關(guān)的限制。目前,由于77GHz頻段在美國和歐洲主要還是劃撥給車載應(yīng)用,因此工業(yè)機器人應(yīng)用使用的波段以60GHz為主,TI也推出了相關(guān)芯片。
另一個重要的毫米波雷達應(yīng)用是生理信號識別,主要是通過監(jiān)測人呼吸過程中的身體細微起伏來實現(xiàn)。目前,歐洲和美國已經(jīng)有計劃要求在2022年之后的汽車中都加入車內(nèi)生理信號識別系統(tǒng),當車內(nèi)只剩下兒童時將發(fā)出警報,從而避免發(fā)生車主把兒童遺忘在車內(nèi)發(fā)生意外。
在這樣的系統(tǒng)中,毫米波雷達將會成為感知系統(tǒng)的重要組成部分,因為傳統(tǒng)的攝像頭等傳感器都很難感知到生理信號,而且在設(shè)計角度來看攝像頭鏡頭必須裸露在外而且很難避免視野被遮擋,而毫米波雷達可以安裝在塑料遮蔽物的后面且對于遮擋并不敏感,因此對于設(shè)計來說更友好。
車內(nèi)生理信號識別將是未來毫米波雷達的一塊增量市場,雖然現(xiàn)在具體頻段還沒有規(guī)定但是諸多半導體巨頭已經(jīng)在積極準備中。而當毫米波雷達在車載生理信號監(jiān)測應(yīng)用中得到驗證后,將會有機會推廣到醫(yī)院和家庭的健康護理相關(guān)應(yīng)用,這些進一步的應(yīng)用值得我們期待。
-
傳感器
+關(guān)注
關(guān)注
2553文章
51390瀏覽量
756585 -
自動駕駛
+關(guān)注
關(guān)注
785文章
13930瀏覽量
167007 -
毫米波雷達
+關(guān)注
關(guān)注
107文章
1053瀏覽量
64540
原文標題:關(guān)于毫米波雷達,你需要了解這些新趨勢
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
毫米波雷達信號的傳輸特性
毫米波雷達與超聲波雷達的區(qū)別
毫米波雷達工作原理 毫米波雷達應(yīng)用領(lǐng)域
康謀技術(shù) | 高效環(huán)境感知:毫米波雷達數(shù)據(jù)采集、可視化及存儲方案

康謀技術(shù) | 毫米波雷達技術(shù)解析


恩智浦展示汽車毫米波雷達最新解決方案
毫米波雷達與超聲波雷達的區(qū)別是什么
毫米波雷達與多普勒雷達區(qū)別是什么
簡述毫米波雷達的結(jié)構(gòu)、原理和特點
毫米波雷達具有哪些特點和優(yōu)勢
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
傳感器國產(chǎn)自主研發(fā)趨勢下,毫米波雷達中的機會在哪里?(深度分析)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論