") 自動火星探測器在沙漠完成測試
自動火星探測器在沙漠完成測試
據(jù)外媒報道,在摩洛哥撒哈拉沙漠一個貧瘠的角落里,三輛自動火星探測器已經(jīng)完成了它們的測試。它們在一場由德國EFKI機器人創(chuàng)新中心組織的機器人活動大會上亮相,據(jù)悉,該活動旨在測試機器人的自動導(dǎo)航和其他空間機器人技術(shù)以此來應(yīng)對未來的火星任務(wù)。
該測試由歐盟Horizon 2020項目資助、國際Project Plan European Roadmap and Activities for Space Exploitation of Robotics and Autonomy (PERASPERA)協(xié)作,在靠近撒哈拉沙漠北部邊緣Erfoud的Ibn Battuta中心進(jìn)行。之所以選擇這一區(qū)域則是因為歐盟的歐洲行星研究基礎(chǔ)設(shè)施機構(gòu)認(rèn)為它是能很好模擬出火星環(huán)境的地帶。
實地測試首先從ESA無人機飛越試驗區(qū)開始,在這項任務(wù)中其獲得了分辨率為4厘米的數(shù)字地形圖,另外結(jié)合探測器數(shù)能為驗證ESA的算法提供一個數(shù)據(jù)集。
不過在測試期間出現(xiàn)了一些意外。由于沙丘太過均勻?qū)е?a href="http://www.zgszdi.cn/v/tag/3744/" target="_blank">計算機視覺算法在導(dǎo)航時遇到了困難。工程師們表示,這是因為這些機器人是通過彼此間差異來識別特征并獲得編程,而沙丘的同質(zhì)性讓它們感到困惑。
積極的是,SherpaTT探測器在自主模式下行駛了1.3公里,期間當(dāng)它發(fā)現(xiàn)一些不尋常的巖石并需要前往更好的地方去收集圖像時它甚至能夠向主規(guī)劃師發(fā)送請求。這是一個展示未來探測器將不得不自己做決定而不再只依賴于分析師持續(xù)監(jiān)控的例子。
軌道空間演示任務(wù)將會是下一個階段的研究發(fā)現(xiàn),預(yù)計2023年進(jìn)行。
ESA自動化和機器人部門的負(fù)責(zé)人Gianfranco Visentin解釋說:“這種實地測試可以證明你的設(shè)計是可行的,即使是在我們能想象到的最具挑戰(zhàn)性的環(huán)境中。我們設(shè)計的硬件實驗室測試沒有考慮到自然帶來的變化,從天空的光線到景觀的形狀再到沙子和巖石的紋理和顏色。通過這種方式在室外的操作證明我們的系統(tǒng)在比模擬環(huán)境要復(fù)雜得多的環(huán)境中也能運轉(zhuǎn)。”
-
機器人
+關(guān)注
關(guān)注
211文章
28643瀏覽量
208424 -
探測器
+關(guān)注
關(guān)注
14文章
2653瀏覽量
73252
原文標(biāo)題:外媒:自動火星探測器在摩洛哥沙漠完成測試
文章出處:【微信號:youuav,微信公眾號:無人機網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
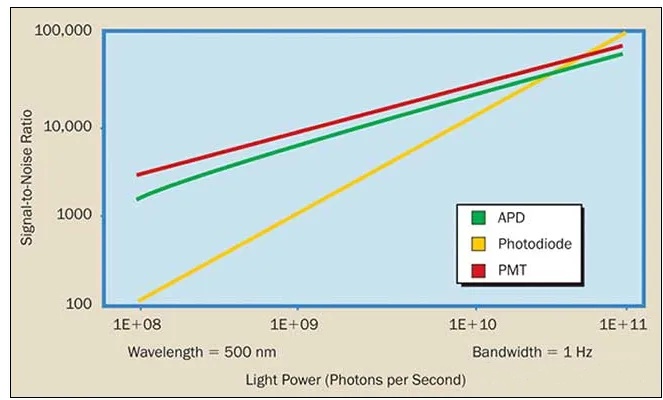
用于光波導(dǎo)系統(tǒng)的均勻性探測器
如何提高金屬探測器探測率
金屬探測器使用技巧 水下金屬探測器使用方法
雷達(dá)探測器的工作原理 雷達(dá)探測器與激光探測器區(qū)別
探測器選擇指導(dǎo)
線型光束感煙火災(zāi)探測器測試方法
熱解粒子探測器與什么相似
被動紅外探測器與主動紅外探測器的原理比較
被動紅外探測器和主動紅外探測器的區(qū)別
在VirtualLab Fusion中的可編程探測器附加組件
VirtualLab:通用探測器
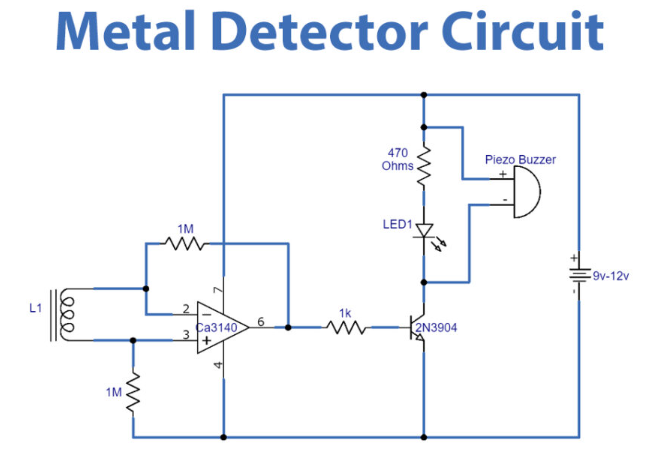
金屬探測器電路圖 帶Arduino的金屬探測器設(shè)計





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論