 深度學習進軍太空領域——衛星實時圖像識別
深度學習進軍太空領域——衛星實時圖像識別
From:東京工業大學 編譯:Yulei近日,來自日本東京工業大學的研究人員將基于深度學習的新型傳感器送入太空。作為日本新型衛星技術驗證計劃的一部分,這一稱為深度學習姿態傳感器(Deep Learning Attitude Sensor,DLAS)的傳感器利用深度學習算法來實現低成本、高精度、長在軌時間姿態傳感器。它主要包含了地球傳感器和星體追蹤器兩個部分,他們分別基于不同的深度學習算法來對進行三軸位姿估計。
利用邊緣計算平臺和簡單的圖像分割算法實現了不同地表的識別,隨后利用一種新穎的姿態估計算法從識別后的數據中估計出三軸位姿。
這一算法主要分為以下幾個步驟,首先在軌道上對地表進行拍攝,并將拍攝的照片分別送入到圖像識別網絡和邊緣檢測器中;其中圖像識別網絡將根據不同的地表特征對圖像進行分割,將圖像中的太空、陸地、海洋和森林等區域識別出來;而送入邊緣檢測圖像則先檢測地球與太空的邊緣,確定出兩個中的姿態;隨后利用地圖映射得到陸地的分割結果;最后結合地表特征的分割結果和陸地的分割結果來實現模式匹配,最終得到三軸位姿的精確估計。
模式識別以及匹配的方法開發出了星體跟蹤器,通過持續追蹤太空中的恒星位置來實現高精度姿態估計。這一方法首先利用星體特征抽取獲取太空中恒星的位置,隨后利用模式匹配來尋找對應的恒星,最后根據匹配的幾何關系實現三軸姿態估計。
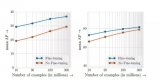
實時圖像識別的軌道測試。通過使用兩個緊湊型可見光攝像機對地表進行拍攝,通過處理估計出三軸位姿。具體來講,將拍攝到的圖像送入專門開發的高速、輕量級圖像識別網絡進行處理,目前可以在4秒內處理800萬像素的圖像、并根據地表特性的不同將地表分割的結果分為九大類,包括綠地,沙漠,海洋,云和外太空等。這是首次使用深度學習在太空中進行實時的圖像識別。
最后廣泛研究這種圖像識別技術的應用,并評估這種三軸姿態估計方法的準確性,特別是地表特征被云層遮擋的情況下的可靠性,并將它們與預先記錄在星載計算機上的地圖數據進行比較。東京工業大學對于納米微信的研發已經有很長的歷史。自工程技術演示衛星CUTE-I以來,東工大的Kawai實驗室和Matsunaga實驗室的研究小組致力于納米衛星空間科學觀測,并通過開展,發射和運行納米衛星,引領世界納米衛星的發展。這次將深度學習技術應用于姿態估計領域也在開創了全新的研究領域。
短期天體物理現象的初始活動跡象。而觀測的主要波段紫外線卻因為大氣阻擋,使得星載設備成為了唯一的研究途徑。
送上太空的觀測設備同時還需要一個穩定的觀測平臺。要觀測即遙遠又微弱的星體,需要衛星保持較高的姿態穩定性。可以想象一下,在顛簸的汽車上我們是無法用相機拍出窗外的美景的,只有在平穩行駛的時候我們才有可能從容的拍攝下清晰的風景。此外由于衛星通信鏈路的限制,難以將所有圖像數據瞬時傳送回地面,只有傳輸短小的報文信息才能使短期快速通信成為可能。為了充分結合天體綜合的觀測設備,實現聯合觀測,開發星載高速處理算法成為了有效觀測的必由之路。研究人員希望衛星可以對采集的圖像進行分析,例如目標天體的準確位置和亮度的分析結果傳送回地球。為了完成這樣復雜的觀測任務,需要開發高度精確的星體跟蹤器以及高新能的星載計算機,同時還需要開發高性能、低功耗的自動圖像分析技術。
-
傳感器
+關注
關注
2553文章
51390瀏覽量
756566 -
圖像識別
+關注
關注
9文章
521瀏覽量
38386 -
深度學習
+關注
關注
73文章
5513瀏覽量
121544
原文標題:讓深度學習飛向星辰大海,東京研究員將新型傳感器送入太空
文章出處:【微信號:thejiangmen,微信公眾號:將門創投】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
深度學習視角下的貓狗圖像識別實現
圖像識別中的深度學習
深度學習在圖像識別領域的四大方向
細粒度圖像識別深度學習開源工具庫Hawkeye解析
圖像識別技術原理 深度學習的圖像識別應用研究
模擬矩陣在圖像識別中的應用

如何使用Python進行圖像識別的自動學習自動訓練?
圖像識別技術原理 圖像識別技術的應用領域
如何利用CNN實現圖像識別
圖像識別技術在醫療領域的應用
圖像識別算法的優缺點有哪些
AI圖像識別攝像機






 工商網監
工商網監
評論