 RobotStudio中創建和控制變位機的詳細步驟
RobotStudio中創建和控制變位機的詳細步驟
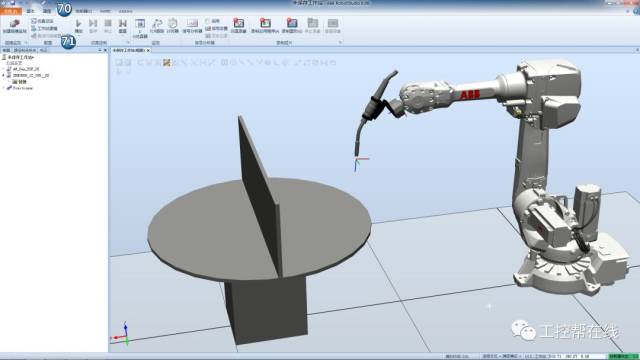
在實際仿真應用中我們時常要做一些旋轉機械裝置,下面就讓我們一起來學習一下在RobotStudio中如何創建變位機機械裝置并用時間管理器連接控制信號從而達到控制變位機的目的,愛學習的小伙伴們我們一起出發吧。
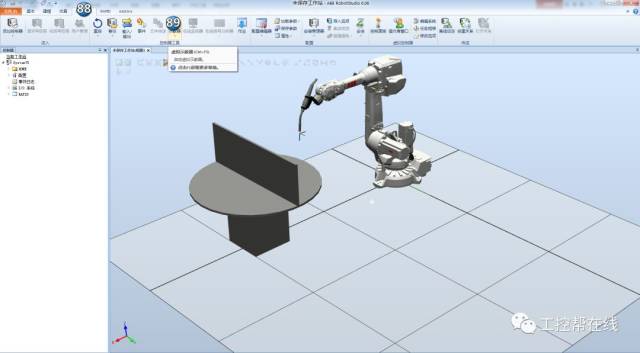
打開并創建新的空工作站。

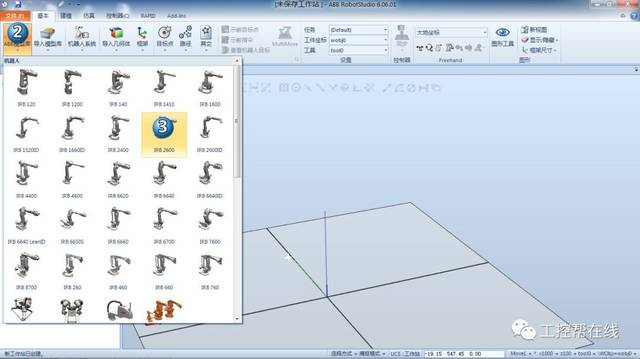
導入一臺IRB2600機器人
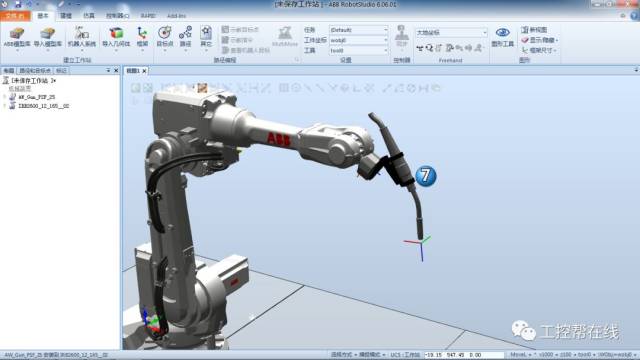
導入一把焊槍

安裝一把焊槍工具
建立機器人系統,建立系統時將DeviceNet和中文選項包勾選。

建立好系統后建立兩個數字輸出信號用于控制變變位機的兩個位置。

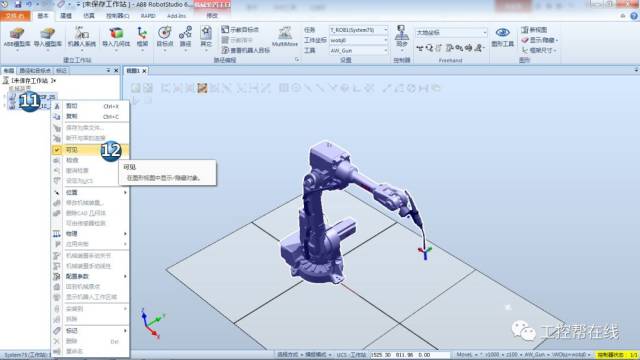
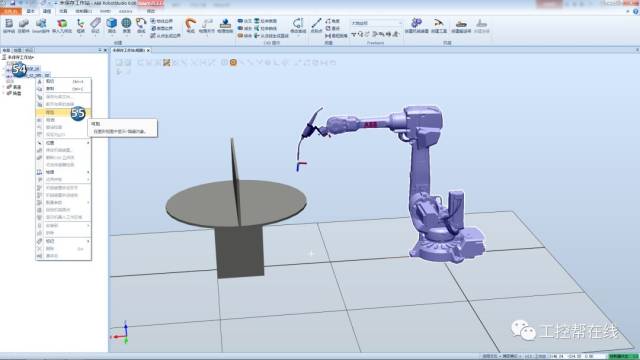
然后在布局中將機器人和工具選中,單擊鼠標右鍵取消勾選”可見”
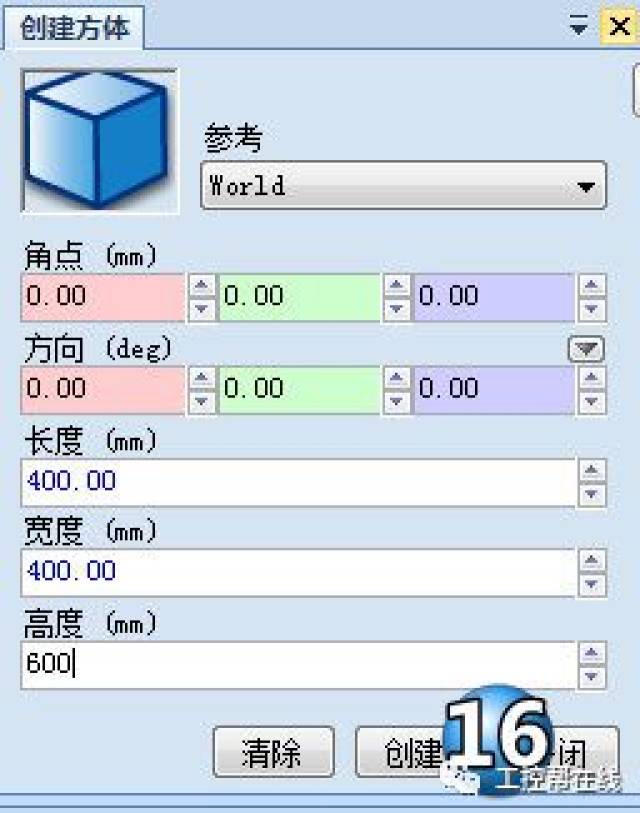
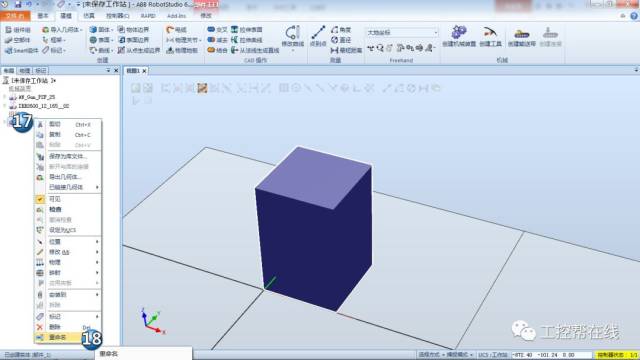
切換到建模選項卡,創建一個矩形體。
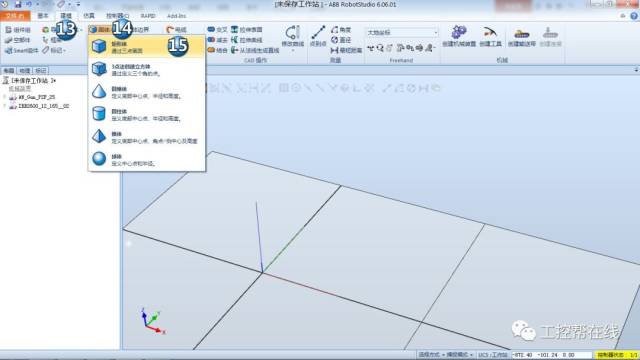
矩形體的參數如下圖,輸入完成之后點擊創建。
右鍵創建出來的矩形體,重命名為底座。
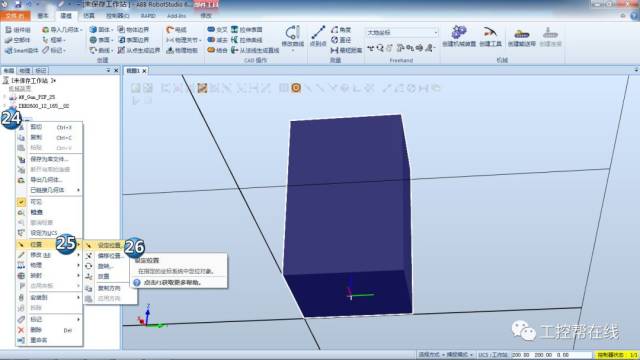
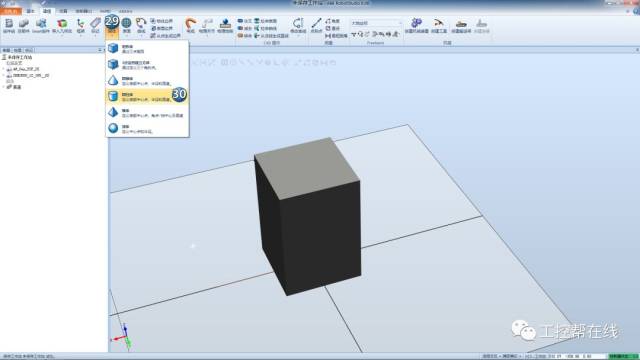
然后對底座設定本地原點。
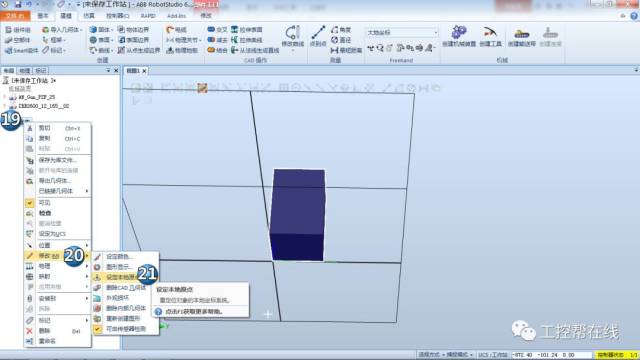
選擇捕捉中心工具,將本地原點設定為底座的下表面中心之后單擊應用(這一步是將描述物體位置和姿態的坐標系設定到物體下表面中心)。
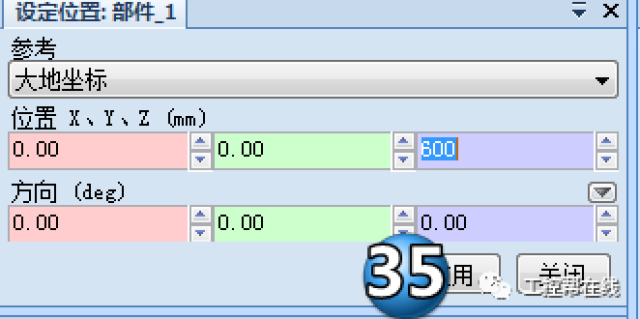
對底座進行位置設定位置。
將里面的數字改成0后單擊應用。

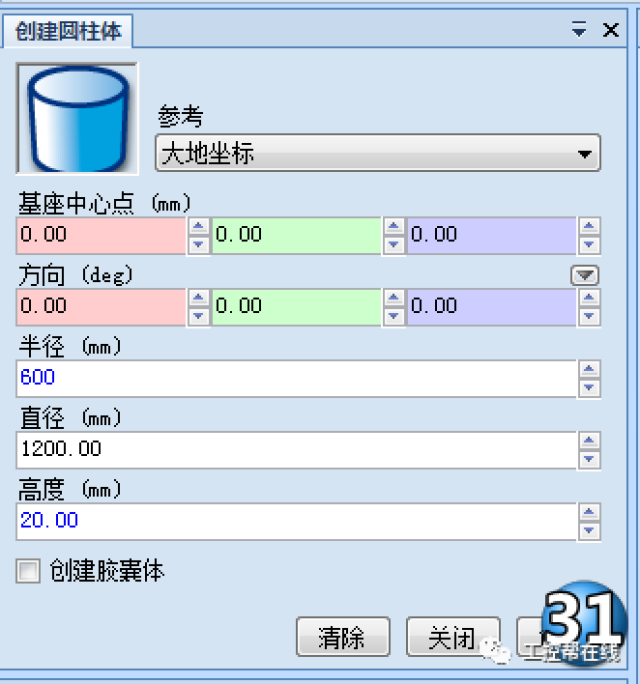
然后繼續建立模型,創建一個圓柱體。
參數如下,輸入完成后單擊”創建”。
然后對其進行設定位置
設定位置參數如下,填完參數后單擊應用。
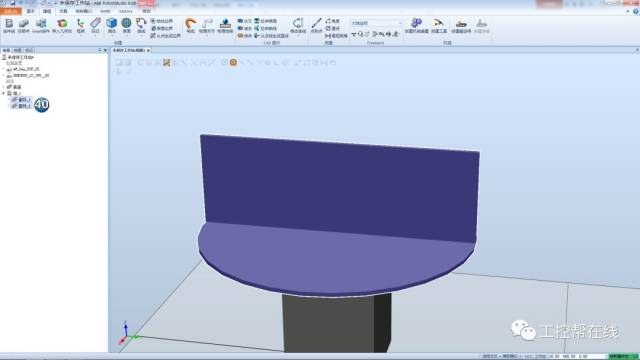
再次創建一個矩形體,參數如下。

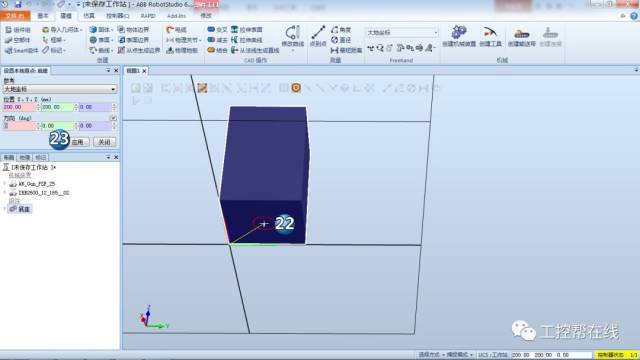
對其設定本地原點,將其本地原點設定到矩形體的下表面中心。
對其進行位置設定位置,參數如下。
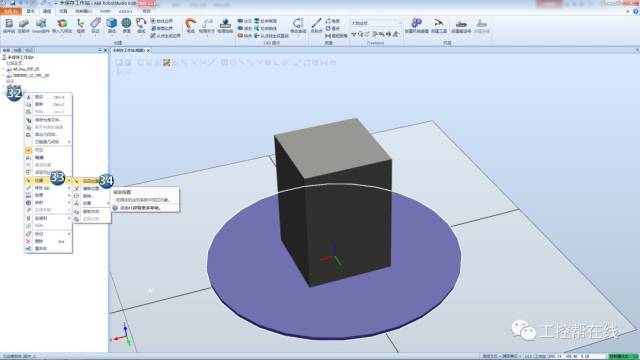
創建一個組件組用于將兩個部件合成到一起。
將兩個部件拖放到組_1里面,注意底座不拖入。
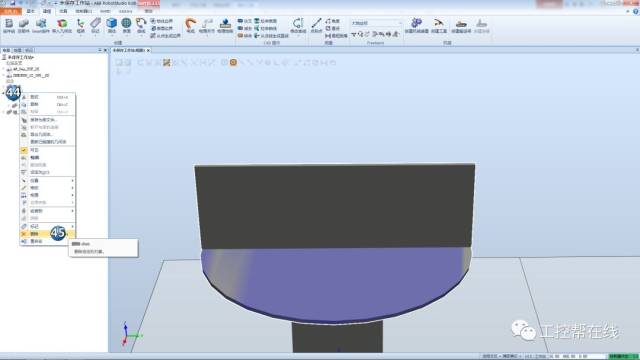
右鍵”組件組”在下拉菜單中選擇”修改”然后選擇”合并到部件”。
將”組_1”刪除。
將組_1合并的部件重命名為”轉盤”。
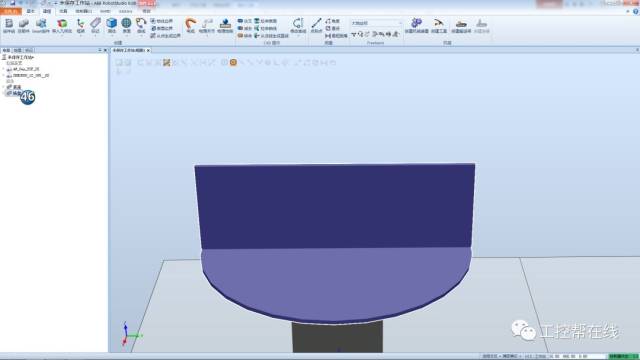
再次創建一個組件組用于整體移動,將底座和轉盤拖入。
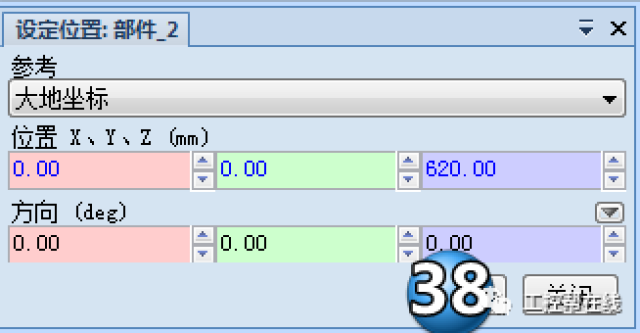
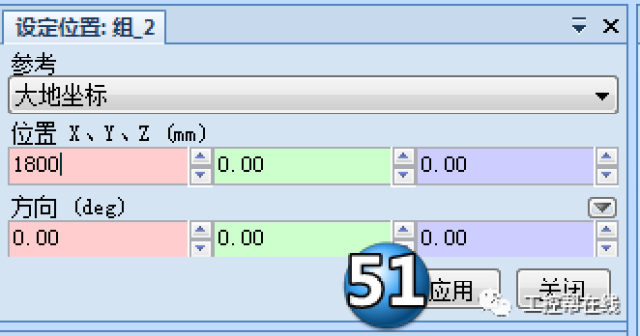
對組_2整體進行設定位置。
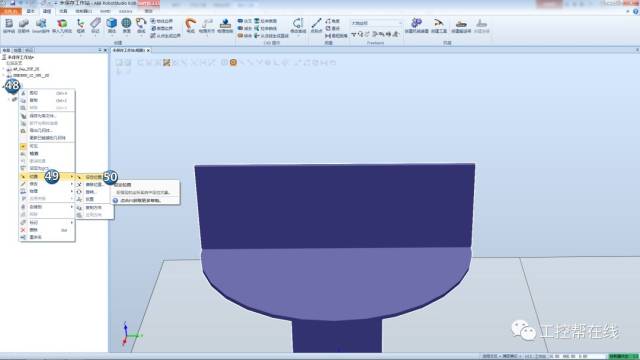
設定位置參數如下,設定完成后單擊應用。
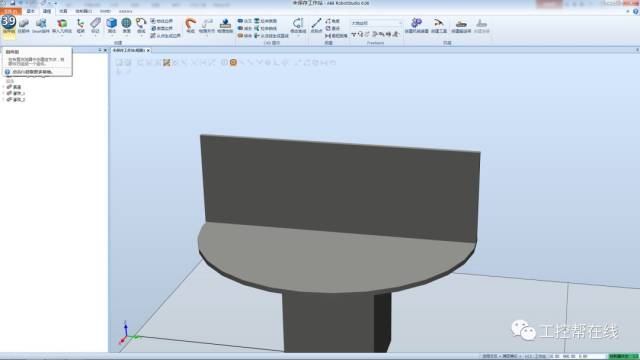
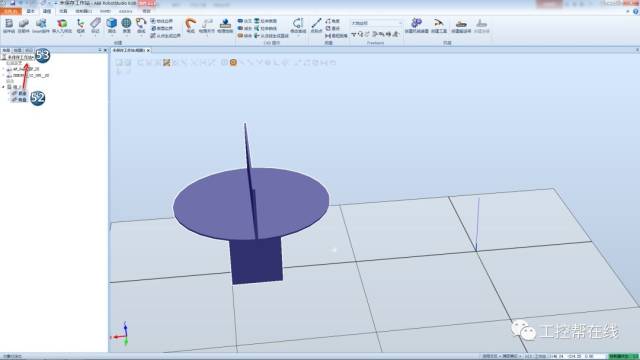
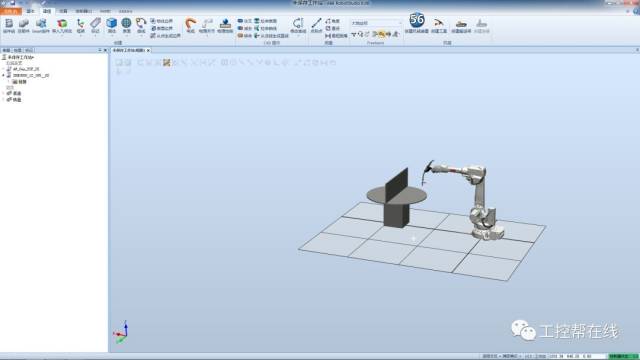
設定位置完成后將組_2里面的底座和轉盤拖放到工作站中(出現是否從新定位選擇否),之后將組_2刪除。
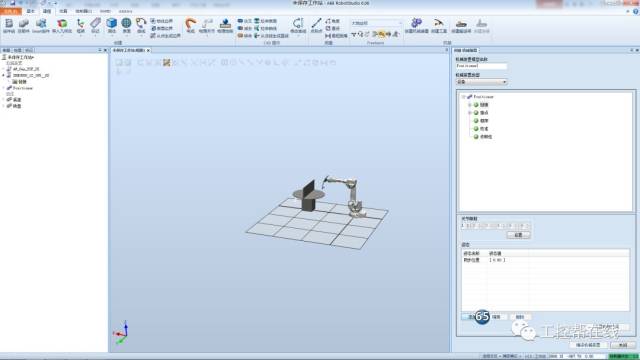
將機器人與焊槍勾選”可見”。
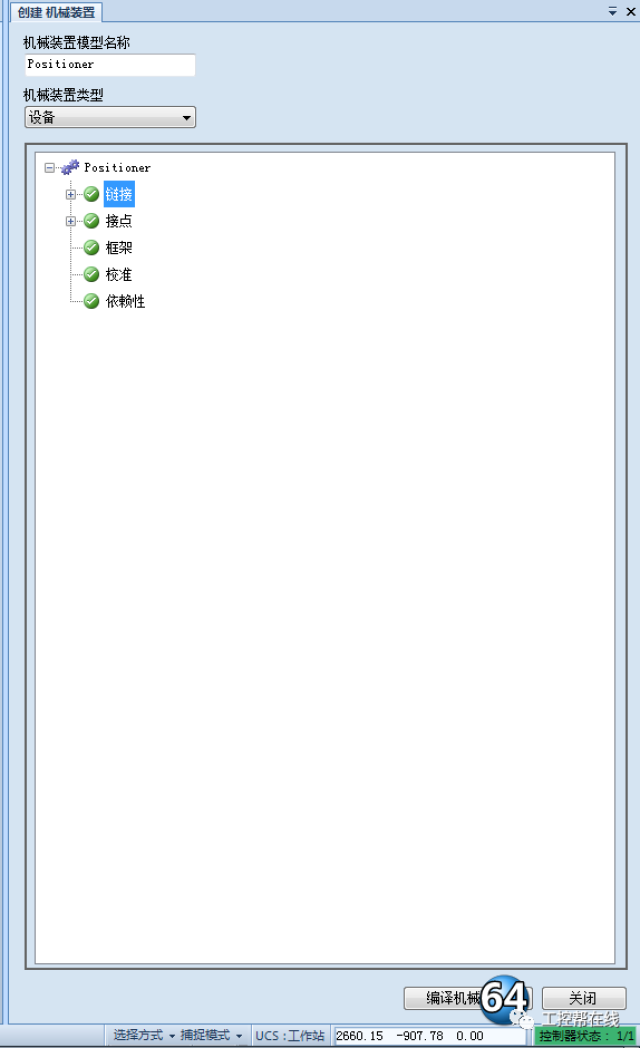
點擊創建機械裝置。
命名成自己喜歡的名稱。
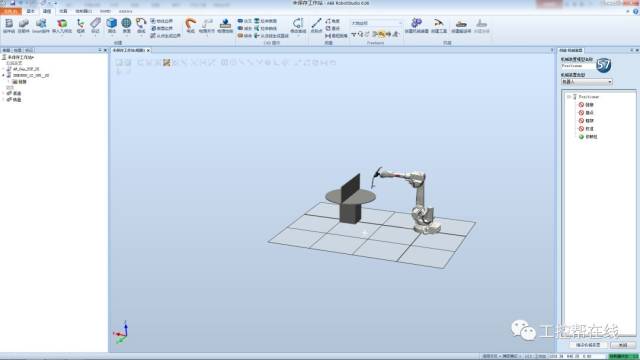
設定機械裝置類型為設備。
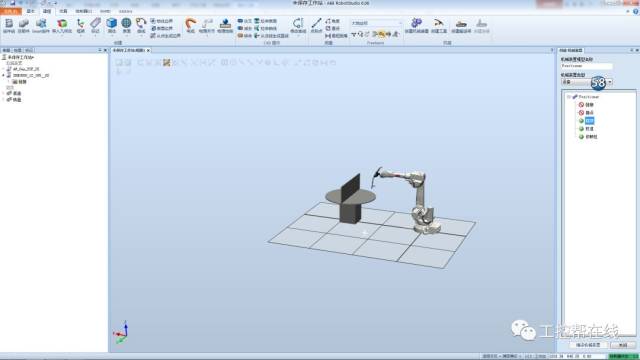
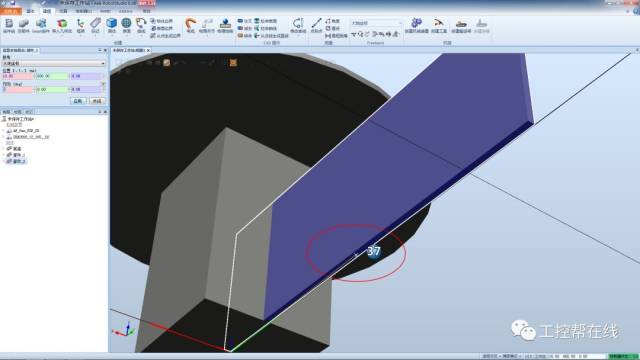
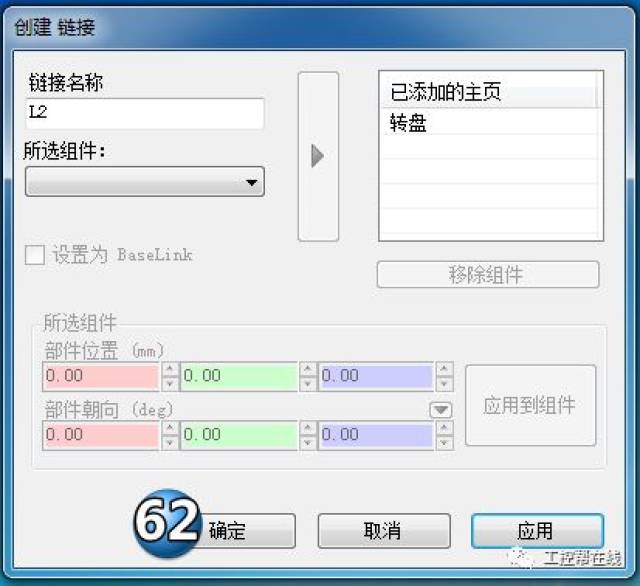
雙擊”鏈接”進入創建連接界面按下圖設定,設定完成后單擊右添加箭頭,將連接添加到主頁上。

然后單擊”應用”。
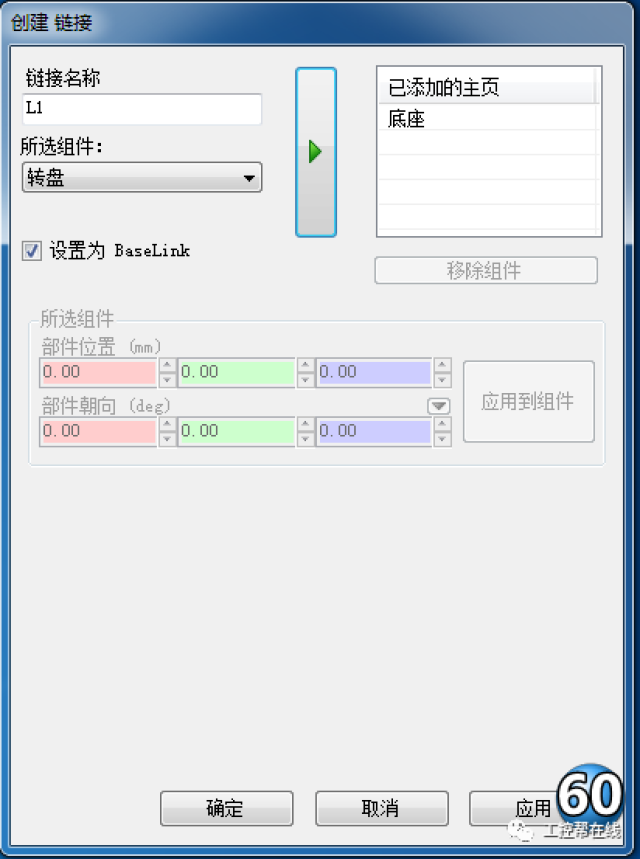

添加完成后單擊”確定”。
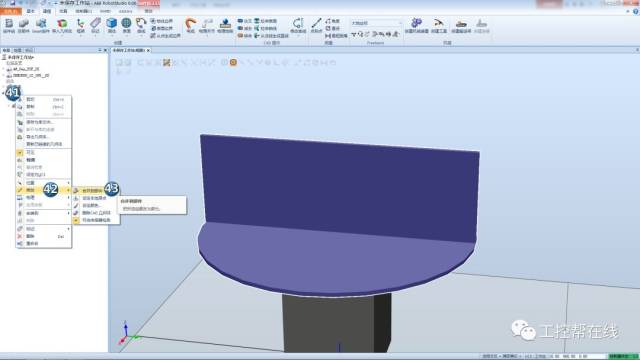
雙擊接點,按下圖所示設置參數,設置完成后單擊確定。

點擊編譯機械裝置。
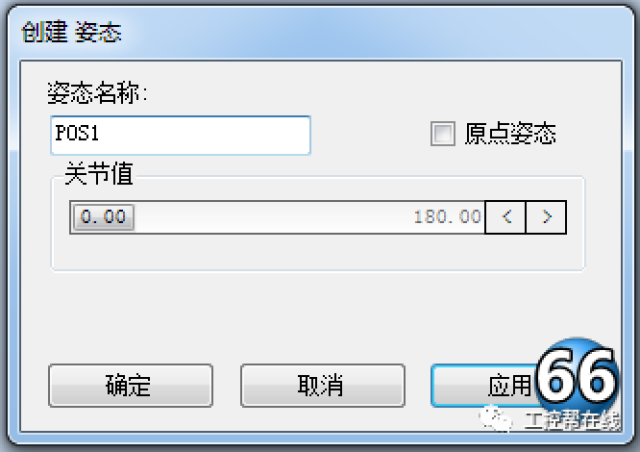
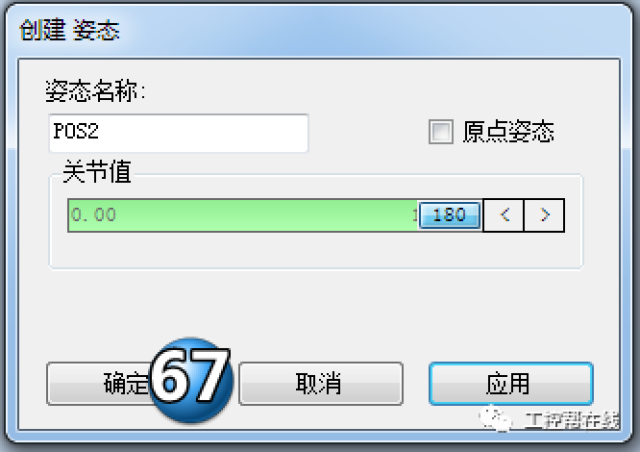
添加如下兩個姿態。
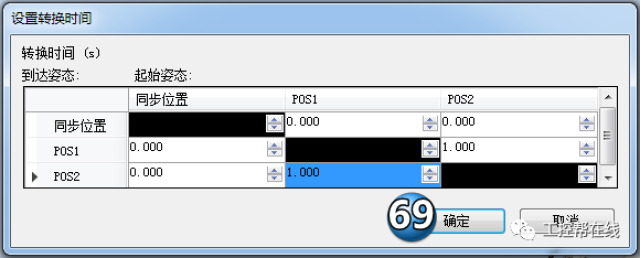
然后設置姿態間的轉換時間。
設置完成后單擊”確定”。
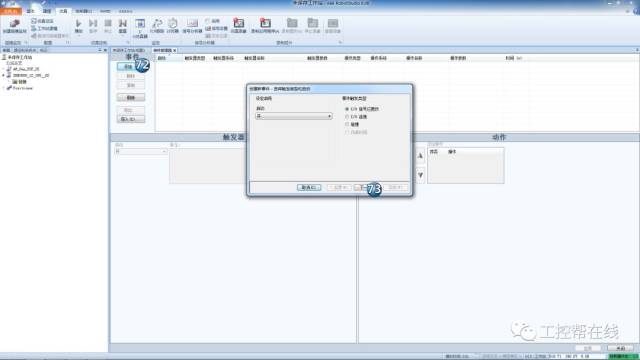
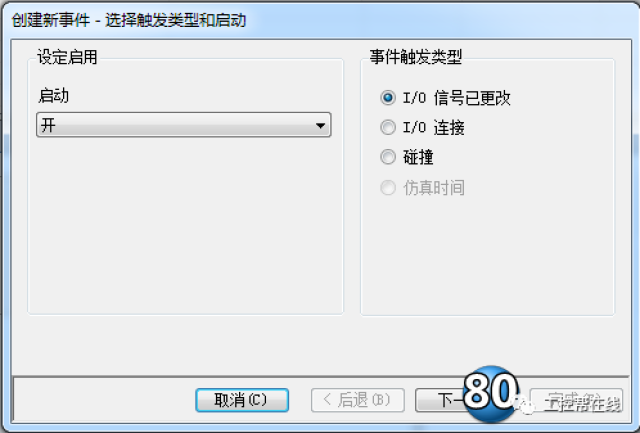
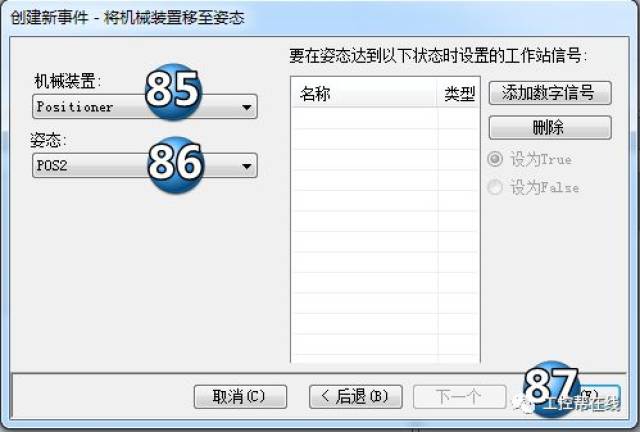
切換到仿真選項卡下,打開配置旁邊的時間管理器。
單擊”下一個”
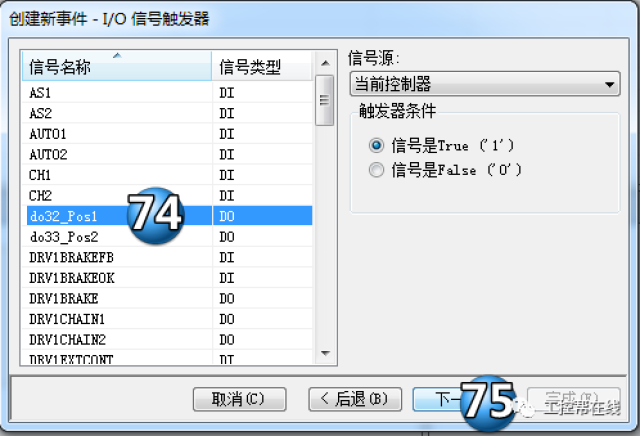
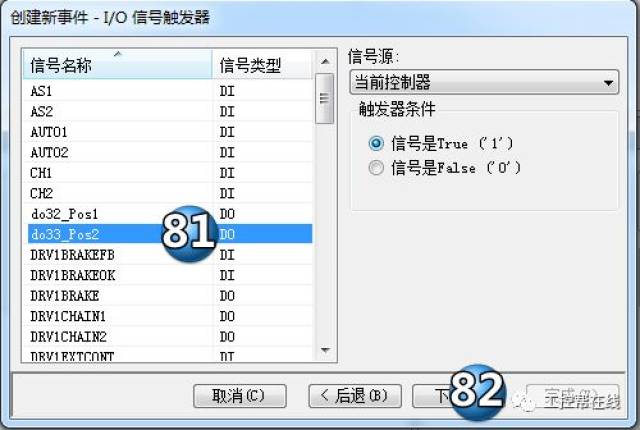
選擇”do32_Pos1”然后單擊下一個。
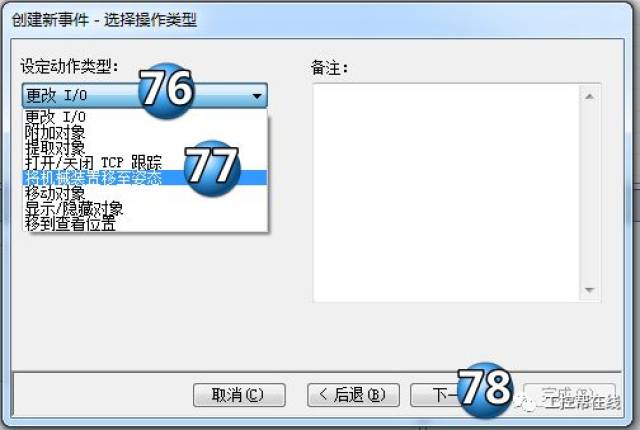
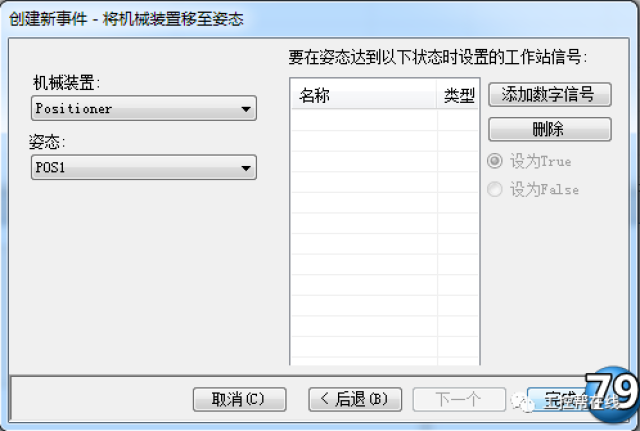
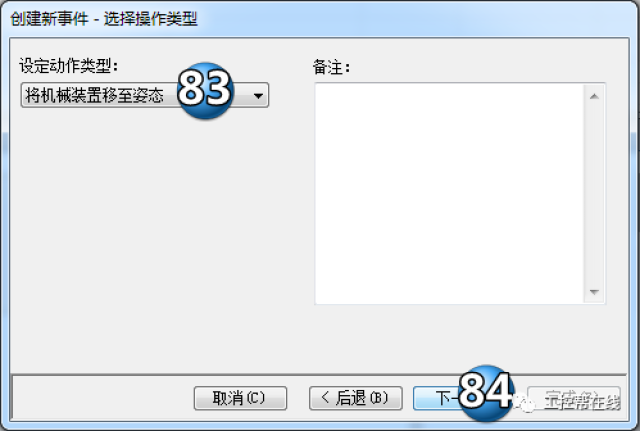
按下圖設定后單擊”下一個”。
按下圖設定后單擊”完成”。
下一個設置也和這一條類似,所以只給出步驟。
設置完成后就可以測試了,切換到控制器選項卡,打開示教器。
打開輸入輸出界面,分別對Pos1與Pos2進行置一置0操作,變位機就會響應信號移動到對應的位置。

-
仿真
+關注
關注
50文章
4124瀏覽量
133991 -
旋轉機械
+關注
關注
1文章
27瀏覽量
11352
原文標題:在RobotStudio中如何創建并控制變位機?
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
RobotStudio隨真實控制器安裝選項及應用

怎么安裝離線編程軟件RobotStudio?

如何創建和使用Xilinx的UltraScale PCI Express解決方案
FreeRTOS任務如何創建和刪除?
焊接變位機是什么,有哪些特點
焊接變位機如何進行調試,有哪些注意事項
焊接變位機的特點是怎樣的
焊接變位機是什么 有哪些作用
焊接變位機如何選型?

深度剖析:MT6816 磁編碼 IC 在機器人焊接變位機中的應用





 工商網監
工商網監
評論