無(wú)刷電機(jī)和傳統(tǒng)的有刷電機(jī)的構(gòu)造差異非常大。無(wú)刷電機(jī)的轉(zhuǎn)子上沒(méi)有傳統(tǒng)的碳刷子,在轉(zhuǎn)子上有固定的電子元件,比如霍爾元件、傳感器等,這些元件可以感受電極磁極位置,并調(diào)整電機(jī)的電流和電壓,從而實(shí)現(xiàn)電機(jī)的控制。伺服電機(jī)中,也有類似的元件用于調(diào)整電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩。
2023-10-15 09:16:38 53
53 要減輕伺服電機(jī)的磨損,可以采取以下措施: (1)適當(dāng)?shù)臐?rùn)滑:定期對(duì)伺服電機(jī)進(jìn)行潤(rùn)滑是減輕磨損的重要步驟。使用適合的潤(rùn)滑劑,按照制造商的建議和規(guī)定進(jìn)行潤(rùn)滑,確保電機(jī)內(nèi)部零部件的摩擦和磨損得到有效減少
2023-09-08 17:05:01129 
在回答這個(gè)問(wèn)題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來(lái)說(shuō),伺服電機(jī)主要用于精確定位,因此大家通常所說(shuō)的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過(guò)應(yīng)用比較少而已。
2023-09-08 11:22:48233 在伺服電機(jī)的應(yīng)用中,用聯(lián)軸器來(lái)連接電機(jī)和負(fù)載,就是典型的剛性連接;而用同步帶或者皮帶來(lái)連接電機(jī)和負(fù)載,就是典型的柔性連接。
2023-09-05 10:47:00288 
什么是伺服電機(jī)?伺服是一種電磁裝置,利用負(fù)反饋機(jī)制將電信號(hào)轉(zhuǎn)換為受控運(yùn)動(dòng)。基本上,伺服系統(tǒng)的行為類似于執(zhí)行器,提供對(duì)速度、加速度和線性或角度位置的精確控制。它由四件事組成:直流電機(jī)、位置傳感器、齒輪
2023-08-30 08:08:52606 
伺服電機(jī)的控制方式比異步電機(jī)更為復(fù)雜。伺服電機(jī)需要一個(gè)控制器來(lái)監(jiān)視電機(jī)狀態(tài)并做出相應(yīng)的調(diào)整,這需要一定的技術(shù)和經(jīng)驗(yàn)。而異步電機(jī)的控制方式更為簡(jiǎn)單,只需要通過(guò)變頻器等設(shè)備對(duì)其進(jìn)行調(diào)速即可。
2023-08-26 11:12:32713 伺服電機(jī)的工作原理是通過(guò)內(nèi)部的反饋系統(tǒng),對(duì)電機(jī)的運(yùn)轉(zhuǎn)狀態(tài)進(jìn)行監(jiān)測(cè)和調(diào)整,使得電機(jī)能夠在預(yù)定的位置和速度上運(yùn)轉(zhuǎn)。在伺服電機(jī)中,通常會(huì)采用編碼器作為反饋傳感器,通過(guò)檢測(cè)電機(jī)轉(zhuǎn)子的位置和速度信號(hào),以實(shí)現(xiàn)對(duì)電機(jī)的控制和調(diào)整。
2023-08-26 11:06:03578 無(wú)刷電機(jī)和傳統(tǒng)的有刷電機(jī)的構(gòu)造差異非常大。無(wú)刷電機(jī)的轉(zhuǎn)子上沒(méi)有傳統(tǒng)的碳刷子,在轉(zhuǎn)子上有固定的電子元件,比如霍爾元件、傳感器等,這些元件可以感受電極磁極位置,并調(diào)整電機(jī)的電流和電壓,從而實(shí)現(xiàn)電機(jī)的控制。伺服電機(jī)中,也有類似的元件用于調(diào)整電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩。
2023-08-26 10:48:44698 在回答這個(gè)問(wèn)題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來(lái)說(shuō),伺服電機(jī)主要用于精確定位,因此大家通常所說(shuō)的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過(guò)應(yīng)用比較少而已。
2023-08-09 09:25:28339 零漂在閉環(huán)控制過(guò)程中,零漂的存在會(huì)對(duì)控制效果有一定的影響,最好將其抑制住。使用控制卡或伺服上抑制零飄的參數(shù),仔細(xì)調(diào)整,使電機(jī)的轉(zhuǎn)速趨近于零。由于零漂本身也有一定的隨機(jī)性,所以,不必要求電機(jī)轉(zhuǎn)速絕對(duì)為零
2015-12-29 11:12:23
交流伺服電機(jī)的價(jià)格相對(duì)較高,對(duì)于一些預(yù)算有限的應(yīng)用來(lái)說(shuō)可能不太適合。另外,交流伺服電機(jī)在低速和低負(fù)載情況下的效率較低,不如直流伺服電機(jī)表現(xiàn)出色。
2023-07-23 11:49:13254 ,同時(shí)電機(jī)自帶的編碼器反饋信號(hào)給驅(qū)動(dòng)器,驅(qū)動(dòng)器根據(jù)反饋值與目標(biāo)值進(jìn)行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動(dòng)的角度。伺服電機(jī)的精度決定于編碼器的精度(線數(shù))也就是說(shuō)伺服電機(jī)本身具備發(fā)出脈沖的功能,它每旋轉(zhuǎn)一個(gè)角度,都會(huì)發(fā)出對(duì)應(yīng)數(shù)量的脈沖,這樣伺服驅(qū)動(dòng)器和伺服電機(jī)編碼器的脈沖形成了呼應(yīng),所以它是閉環(huán)控制,步進(jìn)電機(jī)是開(kāi)環(huán)控制。
2023-06-13 11:18:39761 在回答這個(gè)問(wèn)題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來(lái)說(shuō),伺服電機(jī)主要用于精確定位,因此大家通常所說(shuō)的伺服控制,其實(shí)就是對(duì)伺服電機(jī)的位置控制。 其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過(guò)應(yīng)用比較少而已。
2023-04-27 17:34:35809 
交流伺服電機(jī)的性能要好一些,因?yàn)榻涣?b style="color: red">伺服是正弦波控制,轉(zhuǎn)矩脈動(dòng)小;而無(wú)刷直流伺服是梯形波控制。但無(wú)刷直流伺服實(shí)現(xiàn)控制比較簡(jiǎn)單,便宜。
2023-04-26 10:27:00502 伺服電動(dòng)機(jī)分為直流伺服電機(jī)和交流伺服電機(jī)。直流伺服電機(jī)比較便宜,交流伺服電機(jī)比較常用。
2023-04-04 15:05:451021 在定位系統(tǒng)中,最常用的電機(jī)不外乎是步進(jìn)電機(jī)和伺服電機(jī),其中步進(jìn)電機(jī)主要可分為2相、5相、微步進(jìn)統(tǒng),伺服電機(jī)則主要分為DC伺服和AC伺服兩種。
2相、5相和微步進(jìn)系統(tǒng)主要是驅(qū)動(dòng)器所表現(xiàn)出來(lái)分辨率
2023-03-22 10:38:50 1
1 伺服電機(jī)是一種能夠精確控制運(yùn)動(dòng)的電機(jī),通常包括以下幾種類型:
直流伺服電機(jī):直流伺服電機(jī)是利用直流電作為輸入信號(hào),通過(guò)控制電流大小和方向來(lái)控制電機(jī)轉(zhuǎn)速和轉(zhuǎn)向的一種電機(jī)。直流伺服電機(jī)通常具有高速度和高精度的優(yōu)點(diǎn),廣泛應(yīng)用于工業(yè)自動(dòng)化領(lǐng)域。
2023-03-12 10:20:321775 直流伺服電機(jī)的控制方式有多種,下面介紹幾種常見(jiàn)的方式:
位置控制:這種控制方式主要是根據(jù)電機(jī)的角度或位置進(jìn)行反饋控制,通過(guò)控制電機(jī)的轉(zhuǎn)速和方向來(lái)實(shí)現(xiàn)位置控制,應(yīng)用于需要精確位置控制的場(chǎng)合
2023-03-10 13:49:543156 直流伺服電機(jī)和交流伺服電機(jī)都是常見(jiàn)的精密控制電機(jī),但它們之間有一些區(qū)別,如下所示:
原理不同:直流伺服電機(jī)是基于直流電源供電的,通過(guò)改變電極之間的磁場(chǎng)來(lái)控制電機(jī)的轉(zhuǎn)速和方向;而交流伺服電機(jī)是基于交流電源供電的,通過(guò)改變電樞中電流的方向和大小來(lái)控制電機(jī)的轉(zhuǎn)速和方向。
2023-03-10 13:46:255199 伺服電機(jī)和普通電機(jī)的扭矩大小取決于具體型號(hào)和參數(shù)設(shè)置,沒(méi)有一概而論的答案。一般情況下,伺服電機(jī)的扭矩比同型號(hào)的普通電機(jī)更大,因?yàn)?b style="color: red">伺服系統(tǒng)可以通過(guò)反饋控制來(lái)調(diào)整輸出扭矩。但是,在一些特殊應(yīng)用中
2023-03-09 10:56:339266 一般情況下,伺服電機(jī)的精度要高于步進(jìn)電機(jī)。伺服電機(jī)可以根據(jù)反饋信號(hào)實(shí)時(shí)調(diào)整輸出的電流和位置,能夠更加精準(zhǔn)地控制位置和速度。而步進(jìn)電機(jī)只能按照預(yù)設(shè)的步數(shù)和速度運(yùn)轉(zhuǎn),難以在高速和負(fù)載變化的情況下保持穩(wěn)定的精度。然而,在低速、低負(fù)載、短行程等應(yīng)用場(chǎng)景下,步進(jìn)電機(jī)也可以達(dá)到較高的精度。
2023-03-09 10:45:584633 伺服電機(jī)通常由以下幾個(gè)主要部分組成:
電機(jī)部分:伺服電機(jī)的電機(jī)部分一般由轉(zhuǎn)子、定子、繞組、磁極等部件組成。電機(jī)的類型包括直流伺服電機(jī)、交流伺服電機(jī)、步進(jìn)伺服電機(jī)等,每種類型的電機(jī)在結(jié)構(gòu)和控制方式上都有所不同。
2023-03-07 15:14:584570 伺服電機(jī)的型號(hào)通常由一串字母和數(shù)字組成,不同廠家的型號(hào)表現(xiàn)形式有所不同。以下是一些常見(jiàn)的伺服電機(jī)型號(hào)表示方法:
型號(hào)中含有電機(jī)的參數(shù):一些廠家的伺服電機(jī)型號(hào)中會(huì)包含電機(jī)的參數(shù),如電壓、功率
2023-03-07 15:10:217285 伺服電機(jī)和步進(jìn)電機(jī)都可以達(dá)到高精度的要求,但是伺服電機(jī)通常比步進(jìn)電機(jī)具有更高的精度。這是因?yàn)?b style="color: red">伺服電機(jī)采用了閉環(huán)控制系統(tǒng),可以通過(guò)實(shí)時(shí)的反饋控制,準(zhǔn)確地控制電機(jī)的位置、速度和轉(zhuǎn)矩等參數(shù),從而保證了更高的控制精度。同時(shí),伺服電機(jī)具有更高的響應(yīng)速度和更好的動(dòng)態(tài)性能,可以在更短的時(shí)間內(nèi)響應(yīng)和調(diào)整輸出參數(shù)。
2023-03-07 15:05:093027 伺服電機(jī)通常是一種帶有反饋控制系統(tǒng)的電機(jī),可以根據(jù)控制器的指令實(shí)現(xiàn)精確位置、速度或扭矩控制。伺服電機(jī)通常適用于需要精密控制的應(yīng)用,如自動(dòng)化生產(chǎn)線、機(jī)器人等。
直線電機(jī)和伺服電機(jī)都是用于精確控制運(yùn)動(dòng)的電機(jī),但它們的結(jié)構(gòu)和工作原理有所不同,下面是它們之間的區(qū)別:
2023-03-07 15:01:354902 時(shí),控制器將所需的運(yùn)動(dòng)參數(shù)(如轉(zhuǎn)速、位置和加速度)發(fā)送到伺服電機(jī),然后編碼器讀取電機(jī)的位置信息,并將其反饋回控制器,從而使控制器可以根據(jù)需要調(diào)整電機(jī)的運(yùn)動(dòng)參數(shù),實(shí)現(xiàn)高精度運(yùn)動(dòng)控制。
2023-03-07 14:46:422321 運(yùn)動(dòng)控制器MP3000能實(shí)現(xiàn)同步控制,軸間誤差補(bǔ)償;伺服驅(qū)動(dòng)器Σ-7速度響應(yīng)頻率高,調(diào)整簡(jiǎn)便;直線伺服電機(jī)替代普通傳動(dòng)機(jī)構(gòu),直接帶動(dòng)負(fù)載運(yùn)動(dòng),較長(zhǎng)的行程也能確保剛性。
2023-03-03 14:24:54897 伺服電機(jī)是一種可以通過(guò)控制器精確地控制位置、速度和加速度的電機(jī)。伺服電機(jī)通常由電機(jī)、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機(jī)的驅(qū)動(dòng)電流,從而控制電機(jī)的位置和運(yùn)動(dòng)。因此在很多需要高精度運(yùn)動(dòng)控制的領(lǐng)域得到了廣泛應(yīng)用。
2023-03-03 11:17:277543 伺服電機(jī)是一種可以通過(guò)控制器精確地控制位置、速度和加速度的電機(jī)。伺服電機(jī)通常由電機(jī)、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機(jī)的驅(qū)動(dòng)電流,從而控制電機(jī)的位置和運(yùn)動(dòng)。
2023-03-03 11:06:301284 伺服電機(jī)和伺服驅(qū)動(dòng)器通常作為一個(gè)整體出售,也可以根據(jù)用戶的需要進(jìn)行定制組裝。在選擇伺服電機(jī)和伺服驅(qū)動(dòng)器時(shí),需要考慮電機(jī)的功率、轉(zhuǎn)矩、轉(zhuǎn)速等參數(shù),以及控制系統(tǒng)的響應(yīng)速度、精度、穩(wěn)定性等指標(biāo),以保證系統(tǒng)的性能和穩(wěn)定性。
2023-03-01 15:59:285428 
伺服電機(jī):是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電-機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的伺服電機(jī),屬于功率很小的微特電機(jī),以永磁式直流伺服電機(jī)和并激式直流伺服電機(jī)最為常用。
2023-03-01 15:51:582063 伺服電機(jī)的最簡(jiǎn)單的控制方法是使用脈沖/方向信號(hào)控制。這種方法使用脈沖信號(hào)控制電機(jī)的位置和方向。具體來(lái)說(shuō),當(dāng)接收到一個(gè)脈沖信號(hào)時(shí),電機(jī)會(huì)運(yùn)動(dòng)一個(gè)固定的步長(zhǎng),方向信號(hào)則控制電機(jī)的運(yùn)動(dòng)方向。通過(guò)調(diào)整脈沖信號(hào)的頻率和方向信號(hào)的狀態(tài),可以控制伺服電機(jī)的速度和位置。
2023-03-01 15:49:061844 常規(guī)的伺服優(yōu)化調(diào)整一般需要用到SERVO GUIDE 軟件,而對(duì)于一些不是很懂該軟件操作的客戶或者在現(xiàn)場(chǎng)無(wú)法進(jìn)行在線聯(lián)網(wǎng)調(diào)整的情況下,手動(dòng)調(diào)整就顯得比較關(guān)鍵實(shí)用,在此提供手動(dòng)伺服優(yōu)化調(diào)整思路。
2023-01-29 12:18:56677 伺服電機(jī)可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號(hào)控制并能快速反應(yīng),在自動(dòng)控制系統(tǒng)中,用作執(zhí)行元件,且具有機(jī)電時(shí)間常數(shù)小、線性度高、始動(dòng)
2023-01-11 17:59:15674 工業(yè)機(jī)器人使用頻率非常高,經(jīng)常會(huì)二十四小時(shí)工作,因此對(duì)機(jī)器人零件的質(zhì)量要求非常高,伺服電機(jī)是工業(yè)機(jī)器人的核心裝置,伺服電機(jī)選型就變得尤為重要,為了選擇高品質(zhì)的伺服電機(jī),大家也可以從價(jià)格,重量,體積等多個(gè)指標(biāo)來(lái)選擇。
2022-12-29 10:46:022205 舉個(gè)例子,我們知道鋼管比較堅(jiān)硬,一般受外力形變小,而橡皮筋比較軟,受到同等力產(chǎn)生的形變就比較大,那我們就說(shuō)鋼管的剛性強(qiáng),橡皮筋的剛性弱,或者說(shuō)其柔性強(qiáng)。
2022-12-21 15:37:43981 Parker提供了多款不同的伺服電機(jī),性能各有不同,針對(duì)特定易燃易爆場(chǎng)所使用的防爆伺服電機(jī),與普通通用伺服電機(jī)存在諸多區(qū)別,接下來(lái)就進(jìn)一步看看Parker防爆伺服電機(jī)與普通伺服電機(jī)的區(qū)別。
2022-12-15 15:16:44695 什么是
伺服電機(jī)?是運(yùn)動(dòng)
電機(jī)類型為永磁同步
電機(jī)的才算嗎?并不是。其實(shí),
伺服電機(jī)是一個(gè)大的泛稱,無(wú)論你的運(yùn)動(dòng)
電機(jī)類型是永磁同步
電機(jī),直流無(wú)刷
電機(jī),還是步進(jìn)
電機(jī),只要加了編碼器就都可以叫
伺服電機(jī),因?yàn)?/div>
2022-11-05 10:15:384295 伺服電機(jī)的選型計(jì)算及應(yīng)用案例
2022-10-26 17:42:282528 隨著工業(yè)自動(dòng)化水平越來(lái)越高,伺服電機(jī)在工業(yè)現(xiàn)場(chǎng)應(yīng)用也越來(lái)越廣泛。本文從伺服電機(jī)基礎(chǔ)知識(shí)出發(fā),介紹了伺服電機(jī)的定義、構(gòu)成和基本原理;同時(shí)也將伺服電機(jī)對(duì)軸承的要求進(jìn)行了專業(yè)的介紹。
2022-10-24 10:43:562697 一、數(shù)控銑床,打開(kāi)電源和系統(tǒng),伺服電機(jī)嗡嗡響,響幾分鐘之后伺服電機(jī)會(huì)發(fā)熱,調(diào)小剛性后不響了,但銑出來(lái)的圓不像圓,該怎樣調(diào)?
2022-09-13 14:42:582919 伺服電機(jī)是一種根據(jù)控制信號(hào)確定軸轉(zhuǎn)動(dòng)位置的電機(jī),通常用于通過(guò)調(diào)整襟翼來(lái)控制遙控飛機(jī),進(jìn)行無(wú)人機(jī)飛行定位,在流量控制中用于閥門控制,或用于連續(xù)驅(qū)動(dòng)機(jī)器人的輪子。
2022-08-25 10:26:221701 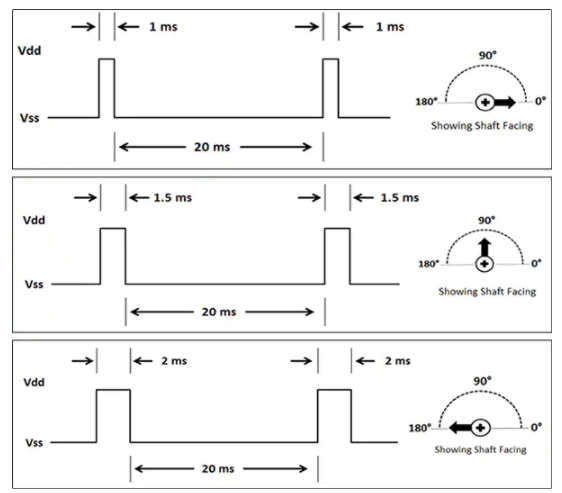
Parker提供了多款不同的伺服電機(jī),性能各有不同,針對(duì)特定易燃易爆場(chǎng)所使用的防爆伺服電機(jī),與普通通用伺服電機(jī)存在諸多區(qū)別,接下來(lái)就進(jìn)一步看看Parker防爆伺服電機(jī)與普通伺服電機(jī)的區(qū)別。
2022-07-21 16:16:14308 
伺服電機(jī)是伺服系統(tǒng)里執(zhí)行位移做功的部分,它是控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī)。一般來(lái)說(shuō),伺服電機(jī)主要可以分為兩個(gè)大類,即直流伺服電機(jī)和交流伺服電機(jī),它們哪個(gè)性能更好呢?往下看,馬上就告訴你。
2022-07-03 16:29:114867 伺服電機(jī)是伺服系統(tǒng)的主體部分,負(fù)責(zé)位移運(yùn)動(dòng),常見(jiàn)的伺服電機(jī)包括直流類型的以及交流類型的,它們都可以添加抱閘設(shè)計(jì)。那給伺服電機(jī)抱閘有什么意義呢?是不是所有的伺服電機(jī)都需要抱閘呢?我們簡(jiǎn)單的來(lái)說(shuō)說(shuō)。
2022-06-14 14:06:113839 H2001-10直流母線電壓欠壓點(diǎn)(默認(rèn)24V),設(shè)置實(shí)際所需電壓;如實(shí)際電源電壓20v,可將H2001-10設(shè)置為18v;更多ethercat總線伺服常見(jiàn)參數(shù)問(wèn)題:一體化伺服電機(jī)參數(shù)調(diào)整
2022-01-06 14:48:045 伺服電機(jī)和步進(jìn)電機(jī)有什么不同?伺服電機(jī)是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī)。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)換成相應(yīng)角位移或線位移的電動(dòng)機(jī)。兩種設(shè)備在工業(yè)自動(dòng)化控制中有著非常廣泛的應(yīng)用。
2022-01-04 19:43:2925979 伺服電機(jī)中的伺服簡(jiǎn)單一點(diǎn)來(lái)說(shuō)就是跟蹤的意思。
2021-08-26 16:10:4313807 帶抱閘高負(fù)荷狀態(tài)下運(yùn)行導(dǎo)致電機(jī)發(fā)熱。低壓伺服電機(jī)電磁剎車盤與線圈間隙比較大,大約4-5MM,這個(gè)是不正常的。我公司技術(shù)人員對(duì)其間隙進(jìn)行了調(diào)整,將此間隙調(diào)整到0.2MM左右。我司技術(shù)人員然后試機(jī)運(yùn)行,查看剎車吸合正常。我司低壓伺服電機(jī)技術(shù)提醒客戶朋友低壓伺服電機(jī)電磁剎車故障的檢測(cè)重點(diǎn)。
2021-08-24 16:02:072814 伺服電機(jī)和普通電機(jī)的區(qū)別 “伺服”是“跟隨”控制信號(hào)的意思,伺服電機(jī)能夠做到精準(zhǔn)控制,可以控制讓轉(zhuǎn)多少就轉(zhuǎn)多少,并且它還有反饋裝置,能夠?qū)崿F(xiàn)閉環(huán),也就是編碼器能夠反饋是否轉(zhuǎn)到了數(shù)量,所以伺服電機(jī)
2021-08-06 18:18:2548174 伺服電機(jī)英文名為Servo motor,是一種在伺服系統(tǒng)中控制機(jī)械電子元件的發(fā)動(dòng)機(jī),是補(bǔ)助馬達(dá)簡(jiǎn)潔變速電子裝置之一。伺服電機(jī)可將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和專屬以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號(hào)控制
2021-07-15 14:57:4539840 倘若伺服電機(jī)是交流電動(dòng)機(jī),就是直流變頻空調(diào)調(diào)速的;倘若伺服電機(jī)是直流電直流無(wú)刷電機(jī),就是直流電源直流變壓器調(diào)速的;所有伺服電機(jī)可以作為“PLC 電機(jī)調(diào)速電源電路 伺服電機(jī)”.
2021-05-31 15:10:3525340 大家很容易弄混剛度和剛性,下面給大家講下兩者的區(qū)別。
2021-03-21 06:00:259 步進(jìn)電機(jī)和伺服電機(jī)在工業(yè)傳動(dòng)控制領(lǐng)域都是重要的控制部件,應(yīng)用面廣泛。但是步進(jìn)電機(jī)和伺服電機(jī)有什么不同呢?
2020-12-14 21:28:35766 大家很容易弄混剛度和剛性,下面給大家講下兩者的區(qū)別。 一)剛度 指材料或結(jié)構(gòu)在受力時(shí)抵抗彈性變形的能力,是材料或結(jié)構(gòu)彈性變形難易程度的表征。材料的剛度通常用彈性模量E來(lái)衡量。在宏觀彈性范圍內(nèi),剛度
2020-09-23 09:27:486075 伺服電機(jī)的使用范圍很多,想要弄清楚伺服電機(jī)會(huì)在什么地方用?那就的從原理上來(lái)說(shuō)一下電機(jī)的功能。
2020-08-25 14:58:008865 本文來(lái)分析一下伺服電機(jī)接線圖,伺服電機(jī)怎么接線。
2020-07-29 11:06:35119287 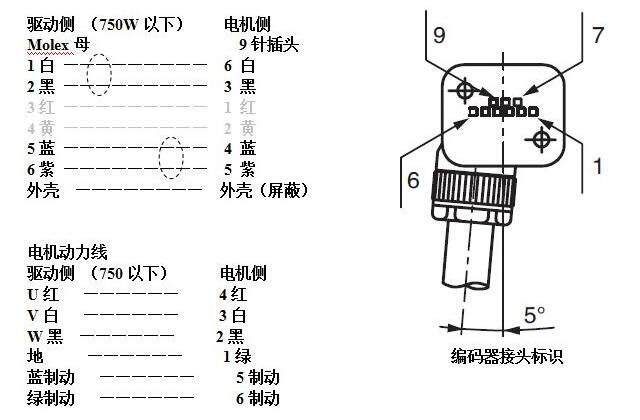
本文先后闡述了伺服電機(jī)和力矩電機(jī)特點(diǎn)及原理。隨后分析了伺服電機(jī)和力矩電機(jī)的區(qū)別。
2019-12-30 11:37:0111338 伺服電動(dòng)機(jī)也可以叫做執(zhí)行電動(dòng)機(jī),是自動(dòng)控制系統(tǒng)中的執(zhí)行元件,其工作是把收到的電信號(hào)轉(zhuǎn)換成電動(dòng)機(jī)軸上的角速度輸出或者角位移輸出。 什么是伺服電機(jī)? 伺服電動(dòng)機(jī)也可以叫做執(zhí)行電動(dòng)機(jī),是自動(dòng)控制系統(tǒng)中
2019-01-01 18:02:00186006 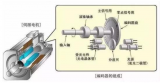
一、數(shù)控銑床,打開(kāi)電源和系統(tǒng),伺服電機(jī)嗡嗡響,響幾分鐘之后伺服電機(jī)會(huì)發(fā)熱,調(diào)小剛性后不響了,但銑出來(lái)的圓不像圓,該怎樣調(diào)?
2018-07-07 11:08:3532272 伺服電機(jī)是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電-機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的伺服電機(jī),屬于功率很小的微特電機(jī)。伺服電機(jī)分為直流伺服電機(jī)和交流伺服電機(jī),以永磁式直流伺服電機(jī)和并激式直流伺服電機(jī)最為常用。
2018-04-02 15:47:2346381 系統(tǒng)的剛度分為機(jī)械剛度和伺服剛度,其中機(jī)械剛度是指系統(tǒng)機(jī)械部件在載荷的作用下,產(chǎn)生單位變形所需要的載荷的大小,它反映了機(jī)械結(jié)構(gòu)抵抗變形的能力。
2018-02-05 10:52:0845784 交流伺服電機(jī)的工作原理:伺服系統(tǒng)- -般由伺服放大器和伺服電機(jī)構(gòu)成。伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,伺服放大器控制的U,V,W 三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電機(jī)自帶的編碼器反饋信號(hào)給驅(qū)動(dòng)器,驅(qū)動(dòng)器根據(jù)反饋值與目標(biāo)值進(jìn)行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動(dòng)的角度。伺服電機(jī)的精度決定于編碼器的分辨率。
2017-10-17 09:28:1122 、預(yù)壓轉(zhuǎn)矩:對(duì)絲杠加預(yù)壓力,剛性增強(qiáng),負(fù)載轉(zhuǎn)矩值增大。 3、保持轉(zhuǎn)矩:升降機(jī)械在停止時(shí),伺服電機(jī)繼續(xù)輸出保持力。
2017-10-16 10:30:496 調(diào)整伺服系統(tǒng)是一個(gè)復(fù)雜而迭代的過(guò)程。它通常需要調(diào)整多個(gè)控制回路,同時(shí),每個(gè)控制回路都需要調(diào)整自己的增益(比例、積分和微分)及額外的參數(shù),如加速度和速度前饋增益以及減少振蕩的過(guò)濾器。 雖然多年來(lái)手動(dòng)
2017-09-29 13:57:215 伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電機(jī)自帶的編碼器反饋信號(hào)給驅(qū)動(dòng)器,驅(qū)動(dòng)器根據(jù)反饋值與目標(biāo)值進(jìn)行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動(dòng)的角度。伺服電機(jī)的精度決定于編碼器的精度(線數(shù))。
2017-03-08 11:07:5112331 一談到運(yùn)動(dòng)控制,大家第一時(shí)間就會(huì)想起伺服電機(jī)。實(shí)際上,伺服電機(jī)的家族也是分為多個(gè)血統(tǒng)的,你又有沒(méi)有想到呢?
2015-08-26 17:45:1134654 什么是伺服電機(jī)
伺服電機(jī):是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電-機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的
2009-04-10 12:53:513335 已全部加載完成
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論