 電子發燒友App
電子發燒友App


1.引言
自我國研制出第一臺大型經緯儀以來,攝影一直是電影經緯儀用于對飛行器(導彈,火箭,宇宙飛船)的主要測量記錄手段。攝影膠片記錄的內容在判讀時能否被發現,與目標相對背景的對比度有極重要的關系。調光的目的在于使膠片的曝光量保持在膠片感光特性曲線的直線段所規定的范圍之內:

(r為底片反差系數),而不受外界背景亮度變化的影響。以前經緯儀傳統的攝影調光是采用變換平衡電橋參數的方法來控制像面照度,檢測元件為光敏電阻。為了適應膠片感光度、攝影頻率和天空背景亮度等各種攝影條件。就要由操作人員來裝定數種不同,并按一定關系排列的背景照度值。每次攝影時,預先用照度計測出天空背景照度值,還要查曝光列表,選擇合適的電阻裝定在檢測電橋的一個臂上,用來設定背景照度值。模擬信號經過伺服放大驅動直流電機帶動密度盤轉動,實現自動調光。這樣的系統,調光精度差,不穩定環節多,調整方法復雜,很難滿足現代高速寬范圍攝影系絨調光要求。
八十年代中期,針對1~200幀/秒,高速寬范圍攝影系統的要求,研制一種新型調光系統。仍然采用變密度盤調節像面照度,同時可連續地75.~120.調節旋轉式快門的開口角,精確控制曝光時間,系統中應用了單片微型計算機,實現智能型自動控制,只要將攝影頻率、膠片感光度給定,單片機就代替操作人員自動選擇背景照度,同時根據計算和邏輯斷準確控制照度值和曝光時間,從而達到攝影全自動調光目的。
靶場經緯儀在經過CCD改裝后,其調光方法一般是根據天氣與航路光線情況設置相機積分時間,然后手動調整5檔可變密度盤,在進行攝影時,由于相機曝光量也不能連續調整,使得CCD攝影達不到理想的效果。
根據此種情況與現代電子技術的發展趨勢,設計了一種基于MSP430單片機的CCD攝影自動調光電控系統,在CCD攝影過程中能根據監視器的效果進行連續的自動或半自動像面光強調整,使目標與背景的對比度高,從而達到理想的攝影成像效果。
2.調光系統的組成及工作原理
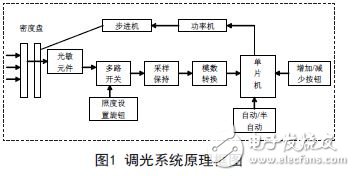
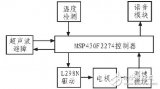
調光系統主要由可變密度盤,光敏元件,處理電路,步近機及其功率機組成,其組成關系如圖1所示。
在攝影過程中,CCD靶面上的曝光量為:

其中:
E為像面照度;T為CCD攝影積分時間。
像面照度的表達式為:

由(3)可見:當0 B , 1 K , 2 K 和τ 的結構參數確定后,則CCD靶面照度隨天空背景亮度而改變。
曝光時間T即為CCD相機的攝影積分時間,可以根據攝影頻率和光路情況選擇一個合適的參數,其大小一般為1~100mS.
從系統原理框圖見,自動調光由單片機控制一對中性可變密度盤來控制像面照度。中性可變密度盤是裝在望遠物鏡攝影系統會聚光路中的一對中性濾光片,這對濾光片的透過率是隨其轉角按一定函數關系連續變化的。其總的變化量相當于六級光圈32倍。光圈的示值刻在調光手鈕上。調光手鈕裝在可折卸的自動調光調焦操面板上,中間通過聯軸節與中性可變密度盤步進電機相連。
像面照度的檢測元件為光敏三極管,它置于攝影CCD靶面面前視場的邊緣。接收主光路進來的背景光,經像面照度值檢測電路進行光電轉換,得出像面照度。
當選擇自動調光方式時,根據控制面板上參數設置旋鈕的設置照度參數值,設定CCD靶面照度。然后像面照度值,照度設置參數由多路開關按地址分時經過樣保持器由A/D模數轉換器轉換成數字量讀入單片機內存。單片機根據光敏三極管檢測的照度值,照度設置參數,實時計算出檢測照度與輸入參數設定的曝光標準量比較,得出照度誤差。單片機根據此誤差量。選擇最佳照度值控制量,由步進機帶動中性可變密度盤,控制照度誤差逐漸減少,直至誤差趨近于零,步進機停止運轉。如背景光不斷變化,此調整也不斷進行。
當選擇半自動工作方式,操作人員根據監視器效果來控制步進機使變密度盤前進或后退,從而使透光量比較連續增加或減少,得到理想的成像效果。若是變化的光路,操作人員可以根據監視器成像不斷調整。
3.控制電路
主要控制電路由像面照度檢測電路,照度設置電路,多路開關與采樣保持器,A/D轉換電路,單片機及功率機模塊等組成。
像面照度檢測電路由光敏三板管接收主光路射入的天空背景光,并轉換成與天空的背景亮度成正比的電壓值,輸出0~10V直流電壓。
照度設置電路主要由采樣電位器與10V基準電壓組成,10V電壓給電位器供電,旋轉電位器便得到一定的采樣電壓信號輸入至多路開關。
多路開關與采樣保持器分別由芯片AD7501與AD583組成。
A/D轉換電路使用的芯片是A/D574.模數轉換電路分別將多路開關選通的兩個模擬量轉換成12位數字量,并行讀入單片機內存。模擬電壓在10V為A/D參考電壓時,則最小分辨率為2.44mV.
MSP430單片機具有功耗低,處理能力強大,豐富的外圍模塊,方便高效的開發環境等優點。選用MSP430F149型號,它是16位的單片機,具有8MIPS的處理速度,60kB的存儲容量,2kB的RAM,多個定時器及48個I/O口。可以勝任對該系統的控制。
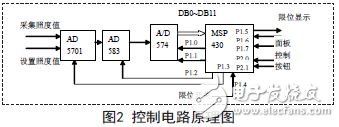
MSP430組成的控制電路原理如圖2所示。
MSP430通過P1.0~P1.3對A/D轉換的控制分別讀取采集照度值與設置照度值,通過P1.4接收限位開關的信號來進行限位信息顯示,通過P1.6~P2.1來讀取面板控制按鈕的信息來進行相關的操作。
主光路射入的天空背景光,并轉換成與天空的背景亮度成正比的電壓值,輸出0~10V直流電壓。
照度設置電路主要由采樣電位器與10V基準電壓組成,10V電壓給電位器供電,旋轉電位器便得到一定的采樣電壓信號輸入至多路開關。
多路開關與采樣保持器分別由芯片AD7501與AD583組成。
A/D轉換電路使用的芯片是A/D574.模數轉換電路分別將多路開關選通的兩個模擬量轉換成12位數字量,并行讀入單片機內存。模擬電壓在10V為A/D參考電壓時,則最小分辨率為2.44mV.
MSP430單片機具有功耗低,處理能力強大,豐富的外圍模塊,方便高效的開發環境等優點。選用MSP430F149型號,它是16位的單片機,具有8MIPS的處理速度,60kB的存儲容量,2kB的RAM,多個定時器及48個I/O口。可以勝任對該系統的控制。
MSP430組成的控制電路原理如圖3所示。
MSP430通過P1.0~P1.3對A/D轉換的控制分別讀取采集照度值與設置照度值,通過P1.4接收限位開關的信號來進行限位信息顯示,通過P1.6~P2.1來讀取面板控制按鈕的信息來進行相關的操作。
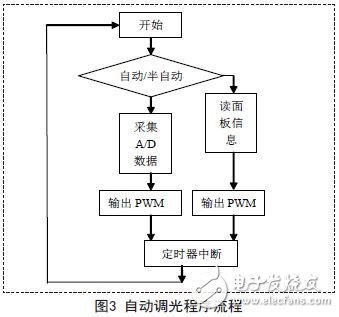
當使用半自動調光方式時,面板上有步進機前進與后退的按鈕,且)還有快與慢的按鈕,單片機根據面板按鈕信息來驅動步進機,操作人員通過監視器的反饋來不斷調整,從而達到調光的目的。
該系統程序使用多個模塊化的子程序編寫。如雙精度乘法程序。除法程序、雙字節、單字節的加法和減法程序,步進機脈沖驅動程序,延時,定時程序,長短焦距的修正程序,系統誤差修正程序。由于程序設計采用模塊化,簡化了主程序,使人機對話更為方便,就系統軟件功能而言,通用性強,使系統控制更加靈活。
4.結束語
這種智能型調光系統具有使用方便,操作靈活,調光控制精度高,速度快等優點。而且簡化了系統硬件結構,增強控制功能,增加了系統的穩定性,可靠性,并具有溫度特性好,抗干擾能力強等特點。該調光電控系統在經緯儀CCD攝影系統加裝后具有普遍的應用前景。










 工商網監
工商網監
評論