編碼器通過跟蹤旋轉(zhuǎn)軸速度和位置來提供閉環(huán)反饋信號。光學(xué)和磁性編碼器是使用最廣泛的技術(shù),如圖2所示。在通用伺服驅(qū)動器中,編碼器用于測量軸的位置,并由此得出驅(qū)動器的轉(zhuǎn)速。在機器人和離散控制系統(tǒng)中,需要精確且可重復(fù)的軸位置。光學(xué)編碼器由帶有精細光刻槽的玻璃盤組成。
2023-11-23 14:58:14 218
218 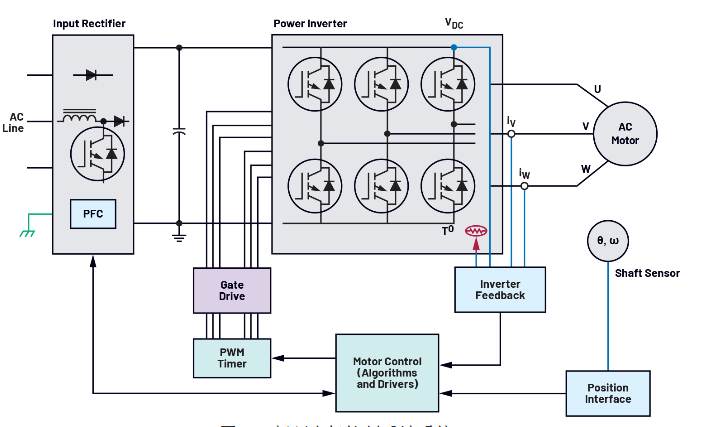
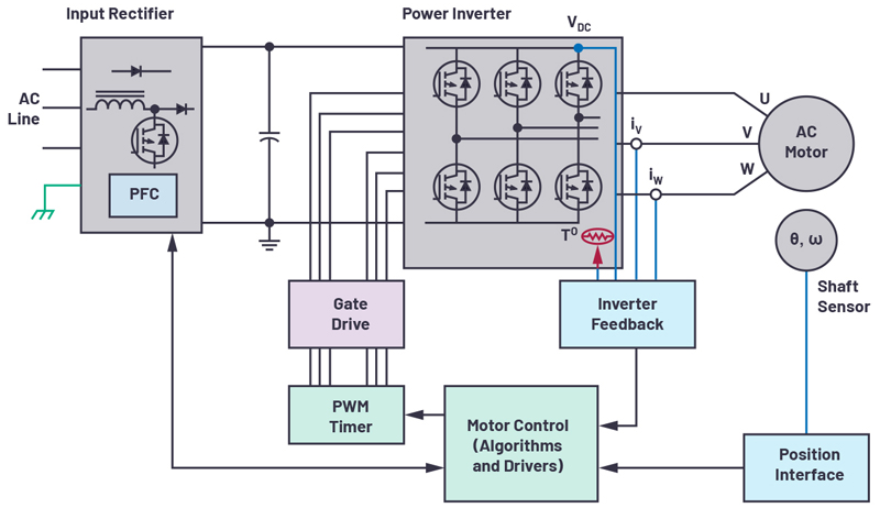
位置、計數(shù)、速度或方向。 ? 為了提高電機控制性能,將功率逆變器和高性能位置、電流檢測環(huán)路用于功率反饋級是必須的,否則電機性能和效率很難提高。位置和速度編碼器反饋正是工業(yè)設(shè)備提升性能的關(guān)鍵一環(huán)。 ? 編碼器——提供準確
2023-11-07 09:10:351944 
大家好。請問有人知道微型伺服電機(雙通道的增量式光電編碼器)一般用什么芯片驅(qū)動嗎?主控芯片用stm32
2017-11-02 12:21:19
驅(qū)動器中的位置編碼器反饋系統(tǒng)而言非常重要。該設(shè)計支持 5 至(...)主要特色帶 16kV IEC-ESD 和 4kV EFT 的 50 兆波特 5V 半雙工 RS-485 收發(fā)器 (THVD1550
2018-09-30 09:34:58
硬件型號:TRDS400BKOYO步進電機編碼器系統(tǒng)版本:電機編碼器系統(tǒng)速度測量和定位,編碼器是一種將信號(如比特流)或數(shù)據(jù)編譯并轉(zhuǎn)換成可用于通信、傳輸和存儲的信號形式的設(shè)備。編碼器將角位移或線性
2021-09-01 08:05:49
多少的通或暗刻線稱為分辨率,也稱解析分度、或直接稱多少線,一般在每轉(zhuǎn)分度5~10000線。 四、位置測量及反饋控制原理 在電梯、機床、材料加工、電動機反饋系統(tǒng)以及測量和控制設(shè)備中,編碼器占領(lǐng)著極其重要的地位
2016-06-27 16:43:31
,但是編碼器絕對沒有打滑。
請問這個編碼器是否同心對電機測速影響這么大嗎?我的理解電機轉(zhuǎn)一圈編碼器轉(zhuǎn)一圈,只要轉(zhuǎn)動的每一圈距離時長一樣應(yīng)該是沒有問題的,但是在變頻器上反饋頻率波動大約有1HZ左右,閉環(huán)完全不能運行。詳細原因究竟是什么?
2024-03-06 17:34:21
伺服電機的種類有哪些?伺服電機主要的作用是什么?編碼器的結(jié)構(gòu)域工作原理是什么?編碼器的分類和特點有哪些?伺服電機與編碼器的工作是什么?
2021-06-28 08:11:44
描述TIDA-00281 是適用于 48V 汽車應(yīng)用的三相無刷直流 (BLDC) 電機驅(qū)動器。該板旨在驅(qū)動 1kW 范圍內(nèi)的電機,可應(yīng)對高達 30A 的電流。此設(shè)計采用了與 C2000
2022-09-27 07:55:21
描述適用于 LRA 和 ERM 電機的 DRV2605 觸覺驅(qū)動器可幫助消除觸覺電機控制的設(shè)計復(fù)雜性,具有較小的解決方案尺寸、高效率輸出驅(qū)動器、閉環(huán)電機控制、快速器件啟動以及自動共振頻率跟蹤等特點
2022-09-28 06:17:31
空心軸增量式編碼器 軸增量式編碼器輪轂軸增量式編碼器無軸承增量式編碼器套件/模塊化增量式編碼器光學(xué)增量式編碼器磁增量式編碼器危險等級遞增編碼器軸絕對編碼器輪轂軸絕對編碼器空心軸絕對編碼器光學(xué)絕對編碼器磁絕對編碼器微型旋轉(zhuǎn)編碼器非接觸式旋轉(zhuǎn)編碼器
2020-07-17 09:54:48
FOC電機驅(qū)動磁編碼器怎么校準?磁編碼器受影響,出來的角度變得非線性了,要怎么做?
2016-01-19 10:50:51
系列文章目錄第一節(jié)stm32電機驅(qū)動與編碼器讀取反饋 第二節(jié) stm32電機pid控制第三節(jié) stm32線速度標定第四節(jié) stm32添加mpu6050得到angle角度第五節(jié) 實現(xiàn)STM32
2021-09-01 08:35:24
為什么要用電機驅(qū)動?TB6612電機驅(qū)動怎么實現(xiàn)?為什么要用電機編碼器?電機編碼器怎么使用?
2021-10-20 07:36:53
旋轉(zhuǎn)變壓器與光電編碼器是目前伺服領(lǐng)域應(yīng)用最廣的測量傳感器。 一、伺服系統(tǒng) 又稱為隨動系統(tǒng),精確的跟隨或者復(fù)現(xiàn)某個過程的反饋系統(tǒng)。 使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨目標(設(shè)定)的任意
2021-06-27 07:13:29
旋轉(zhuǎn)變壓器與光電編碼器是目前伺服領(lǐng)域應(yīng)用最廣的測量傳感器。一、伺服系統(tǒng) 又稱為隨動系統(tǒng),精確的跟隨或者復(fù)現(xiàn)某個過程的反饋系統(tǒng)。 使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨目標(設(shè)定)的任意變化
2021-06-28 06:02:57
第一次關(guān)于伺服電機的筆記1.伺服電機主要的作用是用于高精度定位, 基本上普遍都是用pLC發(fā)出脈沖通過私服驅(qū)動器來達到定位效果,而私服電機后面的編碼器可以反饋伺服電機的行程 與 PLC發(fā)出的脈沖做比
2018-10-25 10:07:08
編碼器可以分為哪幾類?怎樣去讀取編碼器的位置值?伺服電機與編碼器是怎樣工作的?
2021-09-26 08:43:27
第一次關(guān)于伺服電機的筆記1.伺服電機主要的作用是用于高精度定位, 基本上普遍都是用pLC發(fā)出脈沖通過私服驅(qū)動器來達到定位效果,而私服電機后面的編碼器可以反饋伺服電機的行程 與 PLC發(fā)出的脈沖做比
2021-06-28 09:04:45
伺服電機應(yīng)用時必須要有編碼器和測速器嗎?PID控制的反饋是什么?
2023-03-30 16:47:47
伺服電機的編碼器能否更換?因電機軸壞,需要拆下加工,故需要把編碼器拆下來!需要注意哪些問題、
2023-12-26 08:18:16
的?應(yīng)該說速度的檢測靠編碼器;因為 編碼器的反饋脈沖頻率=編碼器的解析度×電機速度,所以電機的速度與編碼器反饋脈沖頻率成正比! 也就是說,速度環(huán)檢測反饋的是編碼器脈沖的頻率;那么要給定電機速度,
2021-06-28 10:01:24
什么是脈沖當(dāng)量?伺服電機和編碼器有什么關(guān)系?伺服電機自帶編碼器為什么還要外加編碼器?
2021-11-01 06:20:22
,減小誤差,可以增大檢測時間Tc。 例如,伺服系統(tǒng)的測量速度用于反饋控制,一般需要在0.01秒以下。 這樣,減小測量誤差的方法是采用高線數(shù)的光電式編碼器。m速度適用于測量高轉(zhuǎn)速。 這是因為,在給出的光電
2023-05-25 10:19:20
單端輸出的AB相編碼器,如何與差分輸入反饋的驅(qū)動器器接線啊?急急急
2017-02-24 15:06:29
電機位置編碼器廣泛用于伺服驅(qū)動器、機器人、機床、印刷機、紡織機和電梯等工業(yè)電機控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對這些挑戰(zhàn),筆者將以
2018-09-05 16:07:42
` 回收驅(qū)動器-回收發(fā)那科編碼器-回收sew編碼器 歡迎來電咨詢***同步微信。收購發(fā)那科系統(tǒng)以及觸摸屏回收fanuc O系統(tǒng) 回收FANUC OI系 回收FANUC 伺服電機 回收發(fā)那科伺服電機
2021-07-05 19:51:04
回收發(fā)那科系統(tǒng)驅(qū)動器 伺服電機及編碼器 上門回收, 回收熱線***同步微信。回收FANUC驅(qū)動器,配件、系統(tǒng)、伺服電機、發(fā)那科電機回收,發(fā)那科控制器回收,發(fā)那科顯卡回收,發(fā)那科軸卡回收,發(fā)那科CPU
2021-09-27 10:20:41
電話+微信:***QQ:2785059036陳工回收發(fā)那科驅(qū)動器、編碼器,收購發(fā)那科編碼器、電機,回收顯示器回收發(fā)那科伺服驅(qū)動器,回收發(fā)那科電機, 回收發(fā)那科主板,回收發(fā)那科內(nèi)存,回收發(fā)那科I/O板
2021-05-12 08:53:56
金屬、半導(dǎo)體等材料在光照下釋放出光電子的現(xiàn)象。近年來隨著科技的發(fā)展,傳統(tǒng)的光學(xué)編碼器在使用中存在許多無法克服的
2022-01-24 06:47:03
帶編碼器直流電機與STM32F103ZET6芯片是怎樣進行連接的?如何去驅(qū)動一種帶編碼器的直流電機呢?
2021-09-08 07:26:43
如何通過編碼器得知電機轉(zhuǎn)速?
2021-11-23 07:33:36
CNC、可編程邏輯控制器PLC、控制系統(tǒng)等來處理。這些傳感器主要應(yīng)用在下列方面:機床、材料加工、電動機反饋系統(tǒng)以及測量和控制設(shè)備。在ELTRA編碼器中角位移的轉(zhuǎn)換采用了光電掃描原理。讀數(shù)系統(tǒng)是基于徑向
2021-10-25 15:18:02
看ADI的差分ADC驅(qū)動器,一般都會說適用于“幾位”的采集系統(tǒng),這個“幾位”是怎么得到的?
假如要選擇一個24位Δ-ΣADC的差分驅(qū)動器,應(yīng)該考慮哪些參數(shù)呢?
2023-11-27 08:05:39
編碼器的關(guān)鍵參數(shù)有哪些呢?怎樣使用STM32的編碼器功能去讀取編碼器反饋的脈沖數(shù)呢?
2022-01-26 07:54:42
我現(xiàn)在想買一個旋轉(zhuǎn)編碼器,用來反饋電機的位置(只是反饋電機的位置信號,并不是驅(qū)動電機,因為我有旋轉(zhuǎn)變壓器跟驅(qū)動器來驅(qū)動電機,只是想用電機的位置信號),但是旋轉(zhuǎn)編碼器的輸出信號是方波信號,我應(yīng)該怎么處理成正弦波信號呢?比如說轉(zhuǎn)一轉(zhuǎn)輸出一個正弦波,先謝謝大家了。
2017-07-13 10:17:04
這只是一個控制直流無刷電機的快速文章,沒有編碼器。本文適用于通常使用霍爾傳感器進行換向的無刷電機。這篇文章不適用于通常以非常高的速度運行的無霍爾ESC(電子速度控制)電機,用于四軸和船只等。回到
2018-07-25 16:44:07
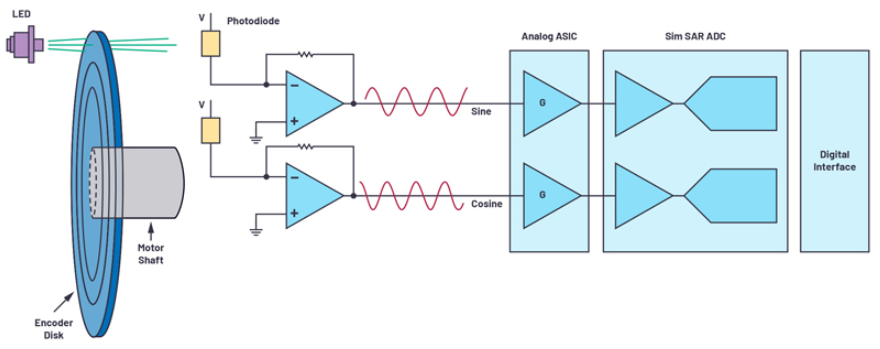
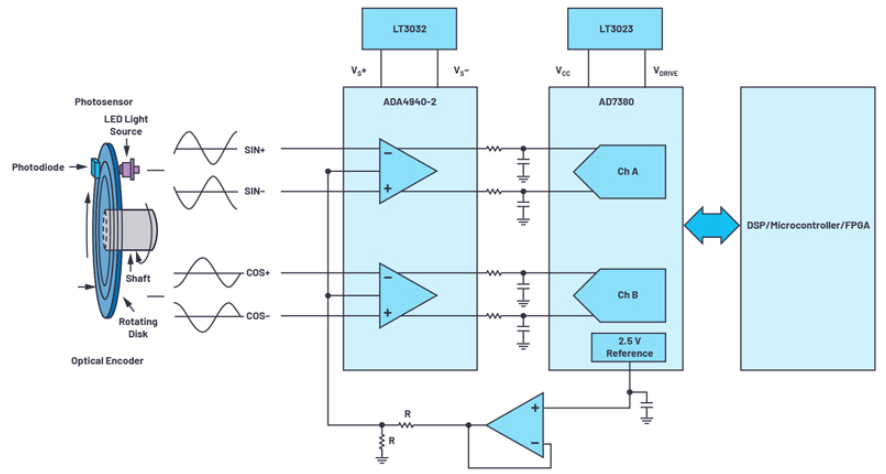
。 適用于微型電機驅(qū)動應(yīng)用的快速反應(yīng)、光學(xué)編碼器反饋系統(tǒng)光學(xué)編碼器通常用于跟蹤電機位置。捕獲這些編碼器的信息以便精確測量電機位 置對于自動化和機器設(shè)備的成功運行很重要。快速、高分辨率、雙通道同步采樣
2020-11-17 11:26:14
帶編碼器的步進電機,電機在工作的情況下有時會出現(xiàn)電機自身的步數(shù)和編碼器測得的步數(shù)不一致的情況!以編碼器測得的步數(shù)和電機自身的步數(shù)對比,調(diào)整電機步數(shù),有時會出現(xiàn)調(diào)整后的電機位置與預(yù)設(shè)位置不符現(xiàn)象,(步進電機步數(shù)準確,編碼器不準確?)問下有什么辦法解決沒?
2018-05-09 22:37:31
我看到有些電機根本沒有編碼器,但是變頻器有速度設(shè)定和反饋值,這個反饋值從哪里來的呢?
2013-03-25 20:48:28
我優(yōu)化完電機的速度環(huán)和電流環(huán)。 用編碼器反饋轉(zhuǎn)電機 發(fā)現(xiàn)電機速度反饋不穩(wěn),偏差在2-3個左右。編碼器固定良好。 優(yōu)化出的P225=20 P226=0.159反復(fù)更改225大小,編碼器反饋還是不穩(wěn)。
如何能是速度反饋穩(wěn)定?
2023-11-23 07:42:02
相比傳統(tǒng)的光學(xué)編碼器,磁性編碼器有哪些優(yōu)點?磁性編碼器技術(shù)在電機的旋轉(zhuǎn)位置反饋中有什么應(yīng)用?磁性編碼器有哪些短板?
2021-07-13 08:10:07
工作環(huán)境的適應(yīng)能力。一對極(單速)的旋變可以視作一種單圈絕對式反饋系統(tǒng),應(yīng)用也最為廣泛。五、正余弦伺服電機編碼器可以不采用高頻率的通訊即可讓伺服驅(qū)動器獲得高精度的細分,這樣降低了硬件要求,同時由于有單圈
2016-01-26 15:25:43
請問HMC830LP6GE寄存器快速編程指導(dǎo)是否適用于HMC829?
2019-01-14 15:05:47
請問stm32如何驅(qū)動電機?編碼器如何讀取數(shù)據(jù)?
2021-10-21 07:59:18
光電軸角編碼器是什么?TMS320F2812是什么?MAX125是什么?怎樣去設(shè)計一款高精度編碼器動態(tài)細分誤差的快速測量系統(tǒng)?與傳統(tǒng)的靜態(tài)檢測編碼器細分誤差方法相比,高精度編碼器動態(tài)細分誤差的快速測量系統(tǒng)有哪些長處?
2021-04-15 06:55:25
,直接找電氣工程師就行了,哈哈。步進電機是執(zhí)行原件,編碼器屬于反饋系統(tǒng),編碼器配合步進電機使用,用PLC控制其運行。按照原理來講是PLC發(fā)送脈沖指令給步進驅(qū)動器,驅(qū)動器給步進電機提供相應(yīng)電流使其運行,...
2021-06-28 09:49:30
支持)是將電源直接應(yīng)用于編碼器。由于電源直接應(yīng)用于編碼器,因此反饋信號僅允許一個電壓降 - 與初始示例相比,有效地將總電壓降減半。 在編碼器上施加功率有助于降低電壓降 檢查編碼器數(shù)據(jù)表,了解
2021-01-19 15:17:03
反饋系統(tǒng)自激振蕩
一、實驗?zāi)康?.了解反饋系統(tǒng)的構(gòu)成;2.理解系統(tǒng)S 平面分析;二、實驗設(shè)備1.TKSS-D 型 信號與系統(tǒng)實驗
2008-09-24 11:20:203106 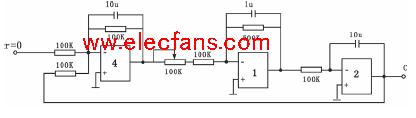
摘 要: 設(shè)計了一套快速反應(yīng)嵌入式智能安防監(jiān)控系統(tǒng),實現(xiàn)對運動目標的跟蹤、定位,快速捕獲人臉圖像。利
2011-01-05 13:43:30650 
伺服驅(qū)動用于自動化系統(tǒng)、機器人、以及專用機器與機床的驅(qū)動系統(tǒng)等眾多領(lǐng)域。本文描述了一些基于FPGA的編碼器方案以連接伺服驅(qū)動
2011-09-07 15:00:57 51
51 AVAGO領(lǐng)先業(yè)界的六通道換向光學(xué)編碼器AEDB-9340系列在設(shè)計上可以簡單地開發(fā)無刷直流電機 (BLDC) 閉環(huán)路伺服系統(tǒng)中的反饋機制
2012-03-13 09:58:201812 
伺服電機主要的作用是用于高精度定位, 基本上普遍都是用pLC發(fā)出脈沖 通過私服驅(qū)動器來達到定位效果,而私服電機后面的編碼器可以反饋伺服電機的行程 與 PLC發(fā)出的脈沖做比較 從而達到一個閉環(huán)系統(tǒng).
2017-02-10 08:31:437523 便捷手搖型增量旋轉(zhuǎn)編碼器特點:適用于數(shù)控機床,磨床等的手動脈沖輸入、緊急停止開關(guān),ENABLE開關(guān)、適用于4位,6位旋轉(zhuǎn)開關(guān)。編碼器如以信號原理來分,有增量型編碼器,絕對型編碼器。我們通常用的是增量
2017-10-25 09:47:3219 電機位置編碼器廣泛用于伺服驅(qū)動器、機器人、機床、印刷機、紡織機和電梯等工業(yè)電機控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對這些挑戰(zhàn),筆者將以
2017-11-17 01:53:522544 測量和處理海德漢公司的高精度增量式編碼器信號和采用EnDat2.2雙向數(shù)字接口的絕對式編碼器信號。經(jīng)使用者的簡單操作,模塊適用于不同位數(shù)、不同類型的海德漢編碼器。該模塊通過實驗、調(diào)試與測試,能有效快速工作,目前已應(yīng)用于實驗用轉(zhuǎn)臺中。
2017-11-18 03:39:012548 
伺服電機編碼器是安裝在伺服電機上用來測量磁極位置和伺服電機轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點,有趕超光電編碼器的趨勢。
2018-02-03 11:34:5559008 我們將演示用于機器人和伺服應(yīng)用的電機驅(qū)動和絕對編碼器之間的EnDat接口解決方案。我們將展示新型ADM3065E收發(fā)器如何通過更高速度來使用更長的編碼器電纜和更高的通信速度。
2018-05-24 15:10:005021 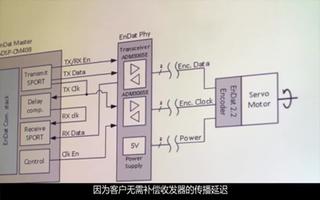
噪聲抗擾度)對于工業(yè)驅(qū)動器中的位置編碼器反饋系統(tǒng)而言非常重要。該設(shè)計支持 5 至 15V(標稱值為 12V)寬輸入電壓范圍(用作到編碼器的輸出電壓),以滿足編碼器的寬電源范圍要求。該設(shè)計的電源根據(jù)所選編碼器的
2018-07-13 08:46:06640 在伺服電機的內(nèi)部零件中有一個是用來測量磁極位置和伺服電機轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器叫伺服電機編碼器,根據(jù)物理介質(zhì)的不同來分,伺服電機編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服
2019-11-06 11:34:3411307 伺服電機編碼器是安裝在伺服電機上用來測量磁極位置和伺服電機轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點,有趕超光電編碼器的趨勢。
2019-11-07 09:18:539465 的每個通道都必須支持同步采樣,以便同時獲取正弦和余弦數(shù)據(jù)點,由這些數(shù)據(jù)點組合提供軸的位置信息。ADC 轉(zhuǎn)換結(jié)果會發(fā)送給 ASIC 或微控制器。電機控制器在每個 PWM 周期中查詢編碼器位置,然后根據(jù)
2020-06-30 11:14:333367 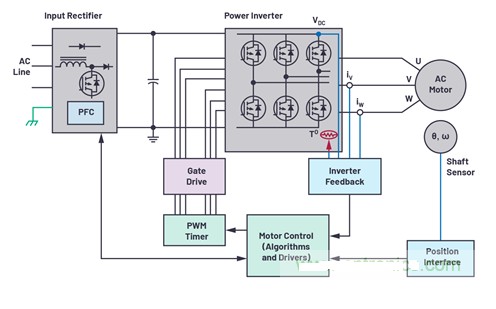
下載適用于Blackfin的JPEG編碼器的生產(chǎn)版。
2021-04-13 09:46:380 下載適用于Blackfin的JPEG編碼器的生產(chǎn)版。
2021-06-16 21:24:290 時)。
?
除汽車外,旋轉(zhuǎn)檢測技術(shù)還適合許多其它應(yīng)用,被用于電機軸、風(fēng)扇、齒輪、渦輪和計算機鼠標滾輪。本圖展示了一個用該技術(shù)來測定流體流速的例子:
這種類型的傳感器名為旋轉(zhuǎn)編碼器,分兩大類:絕對編碼器(它們能以度為單位來辨析確切位置)和增量編碼器(它們可探測相對變化)。絕對編碼器的一個簡單例
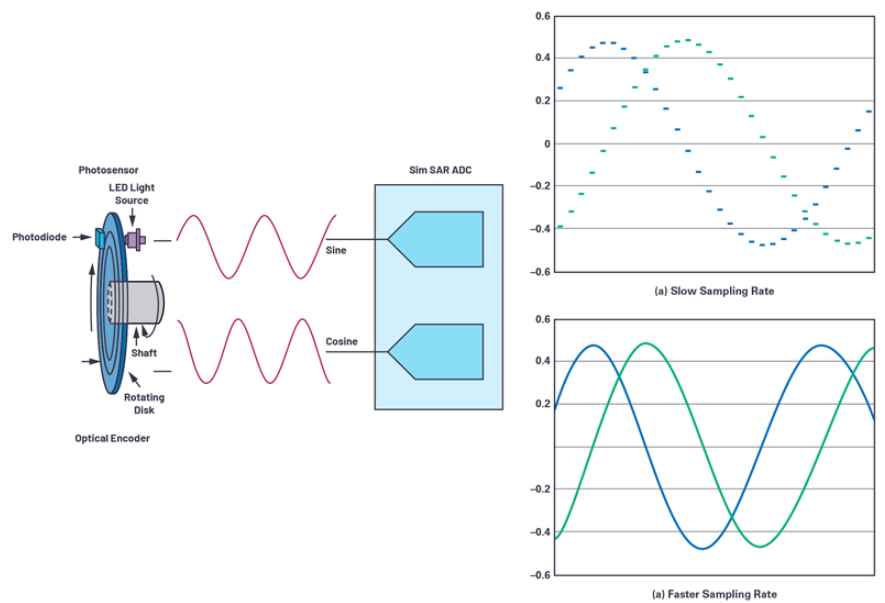
2021-11-24 10:05:181251 本文介紹工業(yè)自動化領(lǐng)域的設(shè)計人員在設(shè)計用于電機控制的位置檢測接口時面臨的常見問題,即:能在速度更快、尺寸更小的應(yīng)用中檢測位置。利用從編碼器捕獲的信息以便精確測量電機位置對于自動化和機器設(shè)備的成功運行很重要。快速、高分辨率、雙通道同步采樣模數(shù)轉(zhuǎn)換器(ADC)是此系統(tǒng)的重要組件。
2022-04-01 13:43:511440 本文介紹工業(yè)自動化領(lǐng)域的設(shè)計人員在設(shè)計用于電機控制的位置檢測接口時面臨的常見問題,即:能在速度更快、尺寸更小的應(yīng)用中檢測位置。利用從編碼器捕獲的信息以便精確測量電機位置對于自動化和機器設(shè)備的成功運行很重要。快速、高分辨率、雙通道同步采樣模數(shù)轉(zhuǎn)換器(ADC)是此系統(tǒng)的重要組件。
2022-04-09 11:25:271899 電子發(fā)燒友網(wǎng)站提供《帶磁編碼器的無刷電機驅(qū)動器.zip》資料免費下載
2022-08-15 09:11:2513 Grayhill 專注于人機界面光學(xué)編碼器,可為用戶提供出色的觸覺反饋。光學(xué)編碼器的最大優(yōu)勢在于其非接觸式開關(guān)技術(shù),可實現(xiàn)極高的使用壽命。
2022-08-23 17:27:48711 電子發(fā)燒友網(wǎng)站提供《適用于C2000 MCU的Tamagawa T Format絕對編碼器主接口設(shè)計.zip》資料免費下載
2022-09-06 15:59:371 電機編碼器配置種類繁多,例如增量式或絕對式,光學(xué)或磁性,帶軸或輪轂/空心軸等。所使用的電機編碼器的類型取決于許多因素,尤其是電機類型,需要閉環(huán)反饋的應(yīng)用以及所需的安裝配置。
2022-10-11 14:44:143128 MICRONOR AG 提供兩個系列的絕對值編碼器,兩者都基于純光學(xué)無源傳感器和控制器。HK-MR330 系列適用于編碼器和控制器之間的較大距離,HK-MR430 系列適用于由于體積小而提供小空間的系統(tǒng)
2022-11-01 11:49:26606 虹科MR430&330系列絕對式光纖編碼器是用于確定軸位置的角度計,均為純光學(xué)無源設(shè)計。HK-MR330系列適用于間隔距離較大的編碼器和控制器,HK-MR430 系列適用于由于體積小而提供小空間的系統(tǒng)。與增量式旋轉(zhuǎn)編碼器相比,測量值在開啟后立即可用,無需參考。
2022-11-17 14:37:01623 本文深入探討了工業(yè)自動化中電機控制位置傳感接口設(shè)計人員面臨的常見問題,即能夠在更快、更小尺寸的應(yīng)用中感測位置。從編碼器捕獲信息以準確測量電機位置對于自動化和機器人設(shè)備的成功運行非常重要。快速、高分辨率、雙通道、同步采樣模數(shù)轉(zhuǎn)換器(ADC)是該系統(tǒng)的重要組成部分。
2022-12-20 11:21:13608 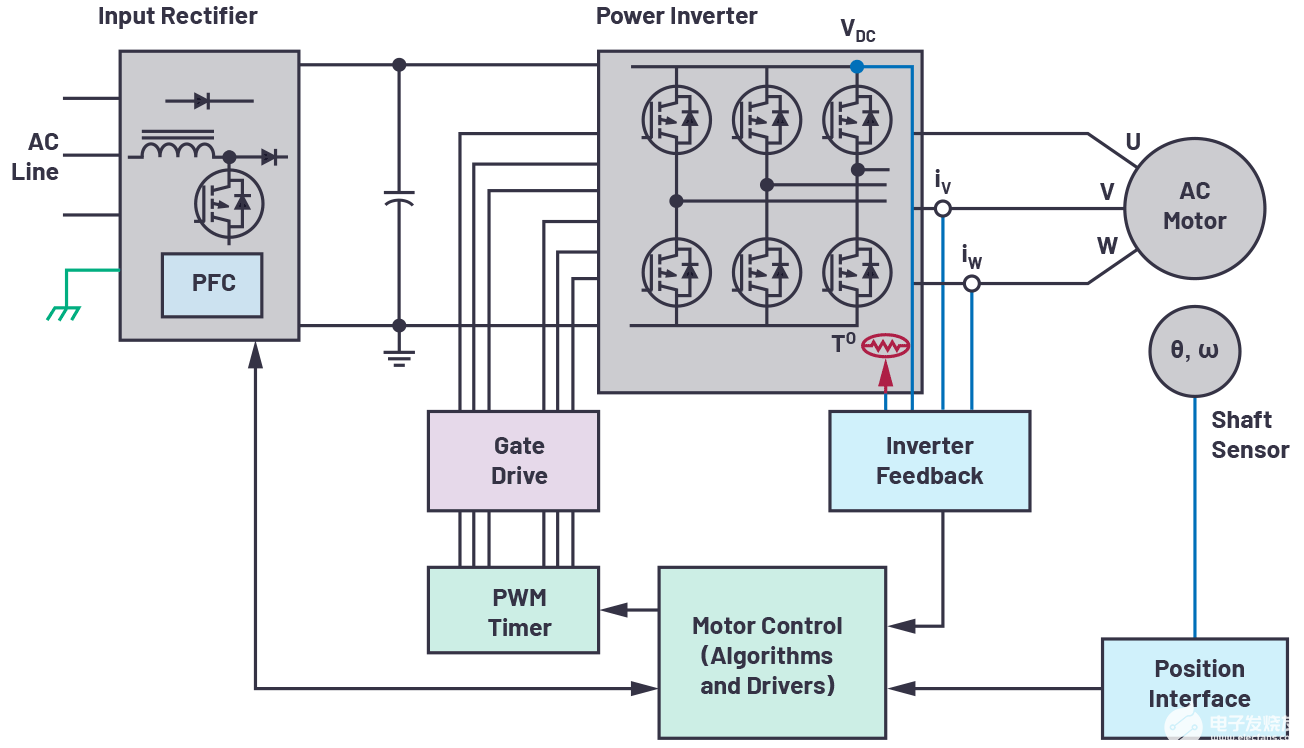
本文深入探討了工業(yè)自動化中電機控制位置傳感接口設(shè)計人員面臨的常見問題,即能夠在更快、更小尺寸的應(yīng)用中感測位置。從編碼器捕獲信息以準確測量電機位置對于自動化和機器人設(shè)備的成功運行非常重要。快速、高分辨率、雙通道、同步采樣模數(shù)轉(zhuǎn)換器(ADC)是該系統(tǒng)的重要組成部分。
2022-12-20 11:32:31521 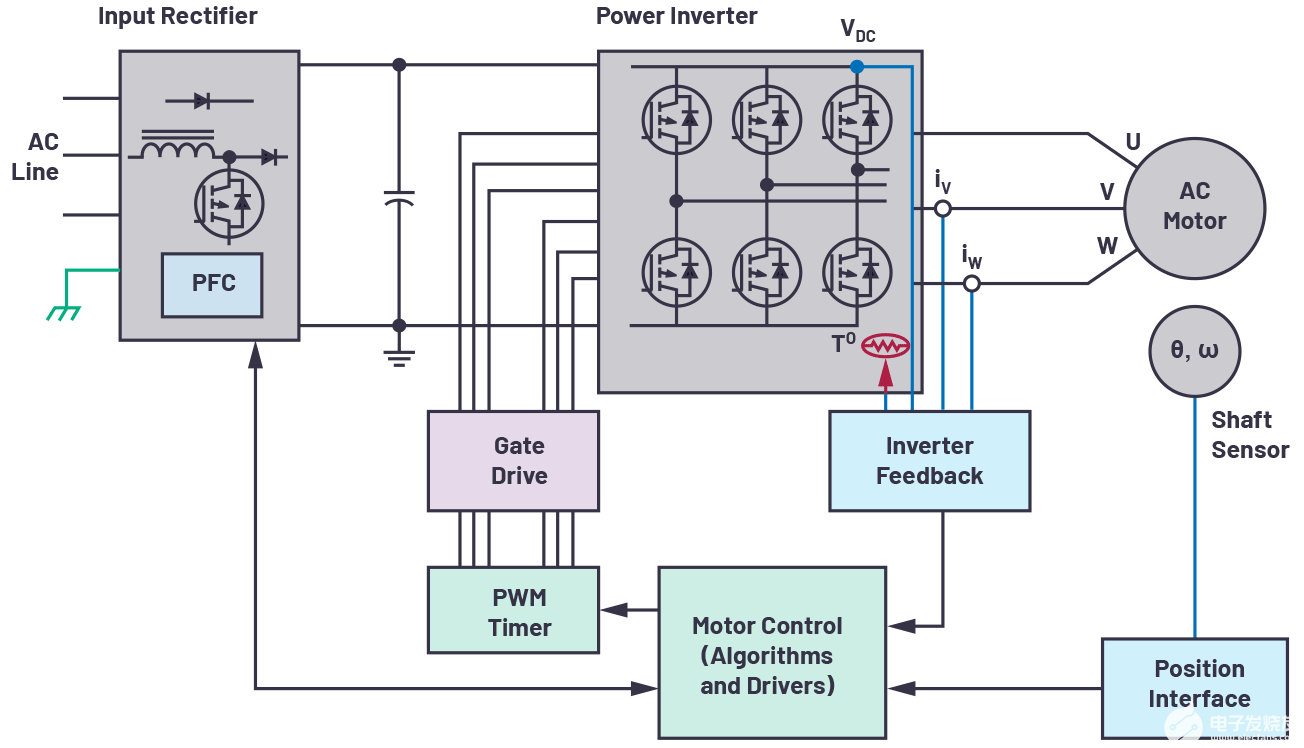
旋轉(zhuǎn)編碼器廣泛用于工業(yè)自動化系統(tǒng)。這種類型的編碼器的典型用途是用于電機,其中編碼器連接到旋轉(zhuǎn)軸,從而為控制系統(tǒng)提供反饋。雖然編碼器的主要用途是角位置和速度測量,但系統(tǒng)診斷和參數(shù)配置等附加功能也很常見
2023-01-03 14:41:14824 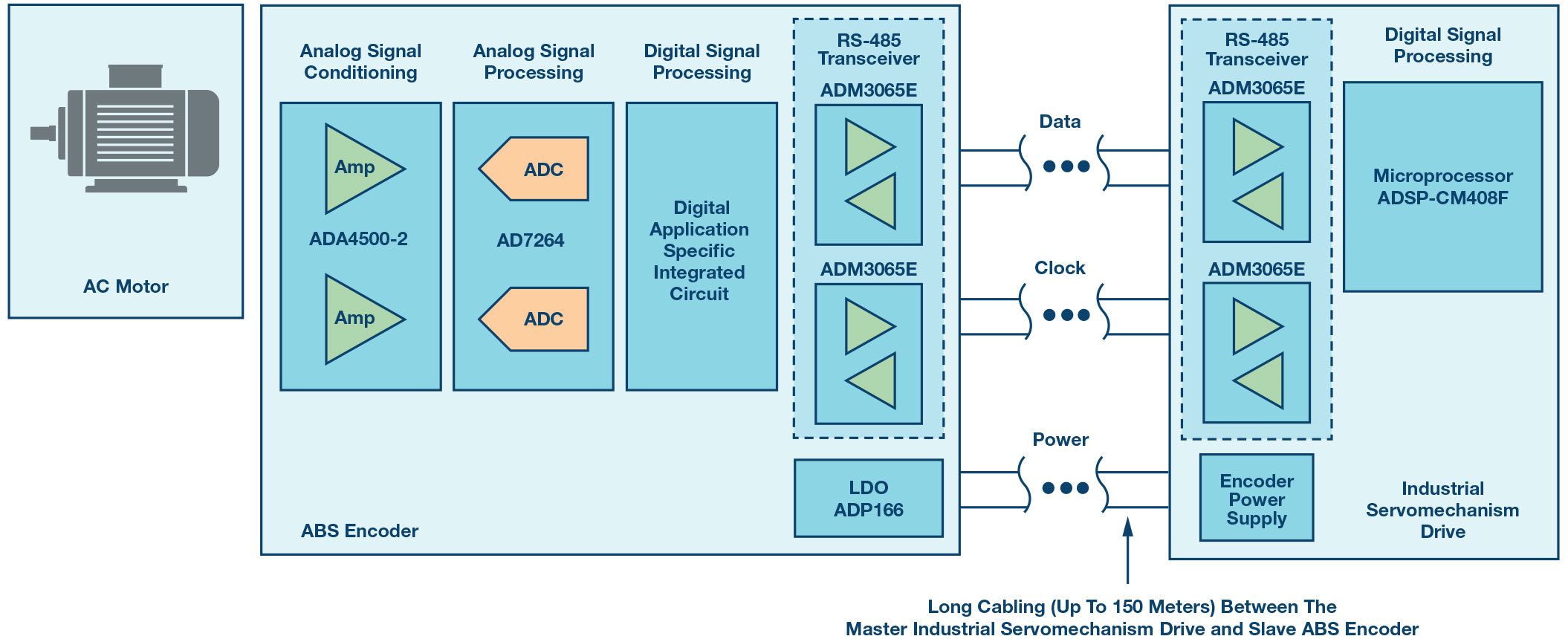
伺服電機編碼器是安裝在伺服電機上用來測量磁極位置和伺服電機轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點,有趕超光電編碼器的趨勢。
2023-02-24 11:56:382035 伺服電機編碼器是安裝在伺服電機上用來測量磁極位置和伺服電機轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點,有趕超光電編碼器的趨勢。
2023-02-27 17:50:211266 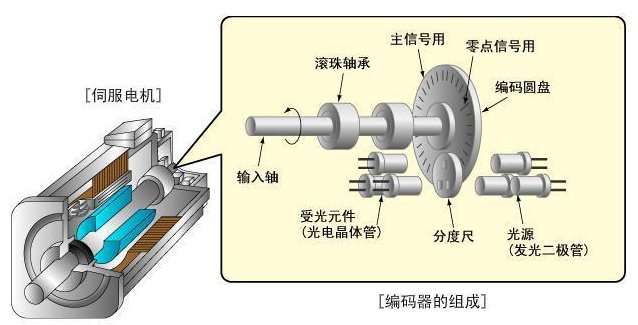
旋轉(zhuǎn)編碼器廣泛用于工業(yè)自動化系統(tǒng)。這種類型的編碼器的典型用途是用于電機,其中編碼器連接到旋轉(zhuǎn)軸,從而為控制系統(tǒng)提供反饋。雖然編碼器的主要用途是角位置和速度測量,但系統(tǒng)診斷和參數(shù)配置等附加功能也很常見
2023-03-06 15:33:26761 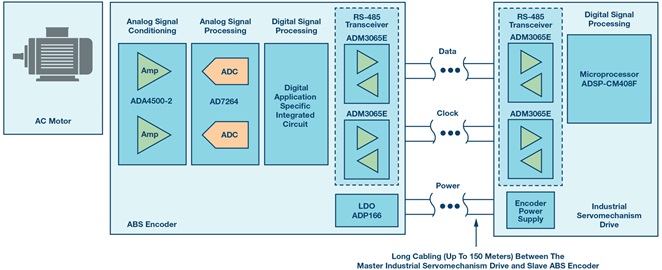
文章目錄 1.L298N電機驅(qū)動 1.1 產(chǎn)品參數(shù) 1.2 實物圖和接線 2.編碼器 2.1 編碼器簡介 2.2 常用編碼器分類 2.3 霍爾編碼器實物圖接線!!!! 2.4 編碼器倍頻原理 3.
2023-03-17 15:42:014 伺服電機編碼器是安裝在伺服電機上用來測量磁極位置和伺服電機轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點,有趕超光電編碼器的趨勢。
2023-03-20 09:12:431278 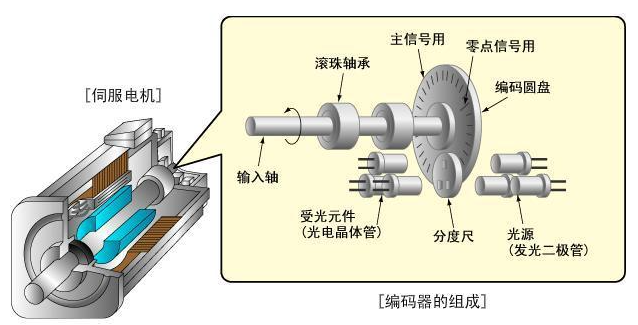
,適用于對位置和速度要求較高的應(yīng)用場景。但是,光電編碼器價格較高,不太適合低成本應(yīng)用。 (2)磁性編碼器:磁性編碼器具有高精度、高分辨率、抗干擾能力強等特點,適用于工業(yè)自動化領(lǐng)域中對位置和速度要求較高的應(yīng)用場景。同時
2023-06-09 08:20:02775 典型的運動控制器卡和模塊包括運動控制IC、微處理器以及用于處理高速編碼器信號的DSP或定制ASIC。控制器向驅(qū)動器或放大器提供速度和旋轉(zhuǎn)方向信號,進而提供適當(dāng)?shù)碾妷汉碗娏鳎üβ剩┧絹聿僮?b class="flag-6" style="color: red">電機。要設(shè)計具有反饋的魯棒且容錯的運動控制系統(tǒng),必須在設(shè)計期間在系統(tǒng)級別解決以下事項:
2023-06-12 14:51:11424 
從具有位置和電流反饋的定速電機轉(zhuǎn)向具有位置和電流反饋的變速電機,為節(jié)省大量工藝和能源提供了一條途徑。本文概述了電機編碼器(位置和速度),包括類型和技術(shù)以及應(yīng)用用例。它還回答了關(guān)鍵問題,例如哪些編碼器
2023-06-15 09:55:05726 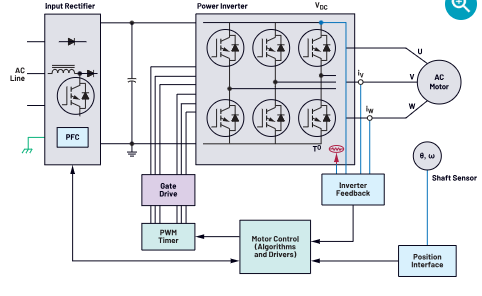
伺服電機編碼器 伺服電機編碼器是安裝在伺服電機上用來測量磁極位置和伺服電機轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服
2023-06-26 14:01:01900 基本的位置反饋信息。單圈編碼器適用于對轉(zhuǎn)動角度要求不高的應(yīng)用,如一些簡單的定位控制。 多圈編碼器:多圈編碼器可以測量多個圈數(shù)的轉(zhuǎn)動位置,通常包括一個單圈部分和一個多圈部分。多圈部分可以提供更高的分辨率和更大的測量
2023-07-12 08:15:061297 伺服電機編碼器是安裝在伺服電機上用來測量磁極位置和伺服電機轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上
2023-08-25 08:09:031589 
在速度、距離和方向反饋系統(tǒng)中,編碼器必須充分利用其功能。簡而言之,編碼器主要檢測和控制可用于調(diào)整或監(jiān)控傳輸?shù)倪\動傳感器。編碼器:通常用于精確測量線性或旋轉(zhuǎn)運動。不同的應(yīng)用場景因設(shè)計和通信方式而異
2023-09-10 08:08:441295 伺服電機編碼器原理 伺服編碼器這個基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號,除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機多數(shù)為同步電機
2023-09-25 14:07:17974 在一體式伺服系統(tǒng)中,編碼器起著關(guān)鍵的作用。 它用于測量伺服電機的轉(zhuǎn)動位置和速度,并將這些信息傳遞給控制器。 編碼器通常采用光電或磁性原理,將轉(zhuǎn)動角度轉(zhuǎn)換為數(shù)字信號。 在一體式伺服系統(tǒng)中,可以使用兩種
2023-10-23 09:50:02562 
電子發(fā)燒友網(wǎng)站提供《如何設(shè)計出面向電機控制優(yōu)化的反饋系統(tǒng).pdf》資料免費下載
2023-11-29 09:14:301 驅(qū)動芯片的種類 EC11編碼器驅(qū)動芯片的種類繁多,不同的廠家和型號會有不同的芯片選擇。常用的EC11編碼器驅(qū)動芯片主要包括以下幾種: AM26LS31芯片:這是一種常用的EC11編碼器驅(qū)動芯片,具有高精度、高穩(wěn)定性、低功耗等優(yōu)點。該芯片主要適用于中高速應(yīng)用,
2023-12-13 10:43:46491 和位置,否則電機只會盲目轉(zhuǎn)動。在此過程中,編碼器起反饋作用。編碼器將轉(zhuǎn)子旋轉(zhuǎn)圓的不同位置分開,然后與轉(zhuǎn)子一起旋轉(zhuǎn)。當(dāng)前轉(zhuǎn)子的位置實時反饋給驅(qū)動器,以便驅(qū)動器知道當(dāng)前位置是否達到目標值。一旦達到目標值,控制U、V、
2024-01-17 17:02:12326 
伺服電機編碼器是一種關(guān)鍵的反饋裝置,用于測量和控制電機的轉(zhuǎn)速和位置。在選擇伺服電機編碼器時,常常面臨一個選擇:使用磁電編碼器還是光電編碼器。接下來將從幾個關(guān)鍵方面比較這兩種類型的編碼器,以幫助您做出更明智的選擇。
2024-01-18 10:29:02464
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論