 電子發燒友App
電子發燒友App


一、前言
在早期的MCU中是沒有看門狗這種東西的,所以產品就很容易出現死機,跑飛的情況。為了避免這種情況的出現,后期的MCU都集成了看門狗的功能。但是目前看門狗發展到今天基本上分為兩大類:獨立看門狗和窗口看門狗。
獨立看門狗:使用的是外部時鐘,即使主頻不工作了,看門狗也能正常工作。只要在到達喂狗時間的上限前喂狗即表示程序是正常的,這點和窗口看門狗是有區別的。另外獨立看門狗是獨立于整個系統之外的,這也是獨立看門狗名字的由來,他有自己獨立的時鐘,不受整個系統的影響,所以獨立看門狗主要用來監控硬件上的錯誤。
窗口看門狗:使用芯片內部時鐘。喂狗的時間既有上限又有下限,即喂狗太早或者太晚都不行,比如我要求你在0.8s到0.9s內完成喂狗動作,如果你在0.8s之前或者在0.9s之后喂狗都是不可以的,都會認為MCU出現了異常,從而復位MCU。窗口看門狗是系統內部故障探測器,如果系統時鐘出現了錯誤,那么窗口看門狗也就失去了作用,主要用于監視軟件的錯誤。
二、獨立看門狗
從上面的簡單對于相信大家對于獨立看門狗已經有些了解了,這部分就詳細的給大家講解一下獨立看門狗,以及獨立看門狗的實現原理。
在了解獨立看門狗之前我想大家還是需要先了解一下看門狗到底是來干什么的,在由單片機構成的微機系統中,由于單片機工作常常會受到來自外界電磁場干擾導致程序跑飛,陷入死循環——即程序正常運行被打斷,系統無法繼續工作。
這種情況下會造成系統陷入停滯狀態,發生不可預料的后果。因此出于對單片機運行狀態進行實時監測的考慮,產生了一種專門用于監測單片機程序運行狀態的模塊或芯片,稱為看門狗。
這里以大家熟悉的STM32為例給大家講解一下獨立看門狗的配置以及工作過程。STM32F10xxx內置兩個看門狗:獨立看門狗和窗口看門狗,提供了更高的安全性、時間的精確性和使用的靈活性。
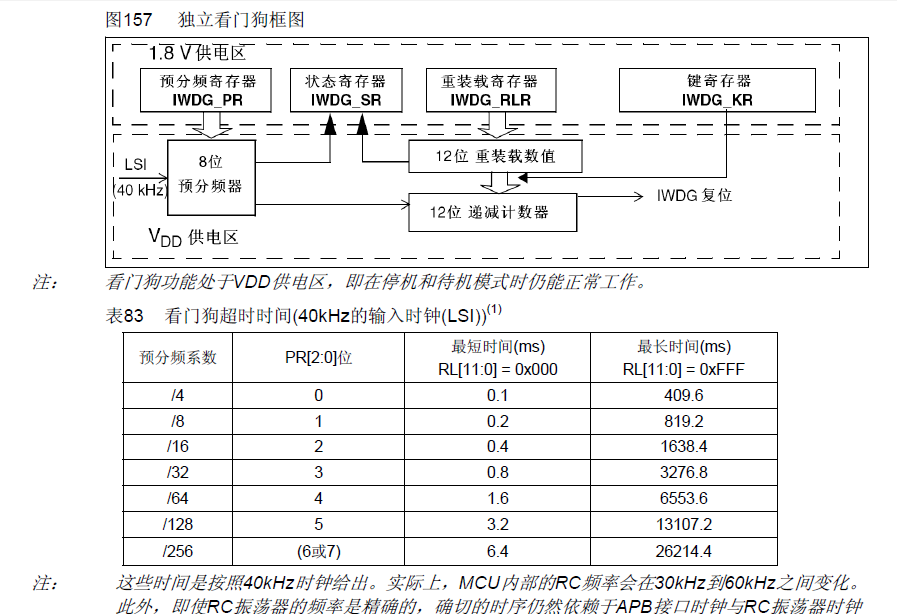
在這里插入圖片描述
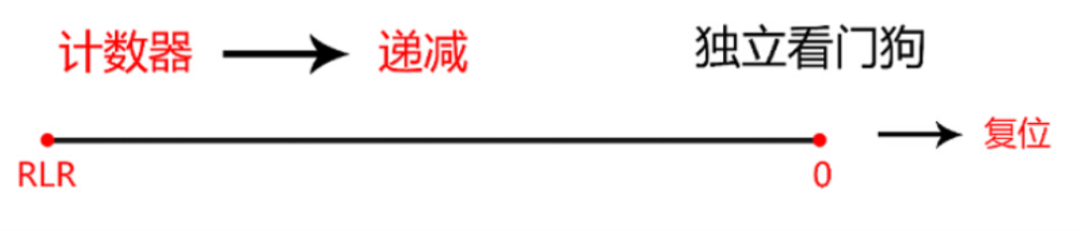
STM32中的獨立看門狗時通過向鍵值寄存器(IWDG_KR)寫入0xCCCC來進行配置的,當開啟了獨立看門狗之后其計數器就開始從0xFFF遞減計數。當計數器計數到末尾0x000時,會產生一個復位信號(IWDG_RESET)。無論何時,只要鍵寄存器IWDG_KR中被寫入0xAAAA,IWDG_RLR中的值就會被重新加載到計數器中從而避免產生看門狗復位。
IWDG_PR和IWDG_RLR寄存器具有寫保護功能。要修改這兩個寄存器的值,必須先向IWDG_KR寄存器中寫入0x5555。將其他值寫入這個寄存器將會打亂操作順序,寄存器將重新被保護。重裝載操作(即寫入0xAAAA)也會啟動寫保護功能。
知道了上面配置的基本原則之后我們就可以開始配置我們的看門狗了,具體配置過程及配置代碼如下所示:
取消寄存器寫保護;
設置獨立看門狗的與分頻系數,確定時鐘;
設置看門狗重裝載值;
使能看門狗;
應用程序喂狗;
配置代碼如下所示:
/**
?*?初始化獨立看門狗
?*?prer:分頻數:0~7(只有低?3?位有效!)
?*?分頻因子=4*2^prer.但最大值只能是?256!
?*?rlr:重裝載寄存器值:低?11?位有效.
?*?時間計算(大概):Tout=((4*2^prer)*rlr)/40?(ms).
?*/
void?IWDG_Init(u8?prer,u16?rlr)
{
????IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable);?/*?使能對寄存器IWDG_PR和IWDG_RLR的寫操作*/
????IWDG_SetPrescaler(prer);????/*設置IWDG預分頻值:設置IWDG預分頻值*/
????IWDG_SetReload(rlr);?????/*設置IWDG重裝載值*/
????IWDG_ReloadCounter();????/*按照IWDG重裝載寄存器的值重裝載IWDG計數器*/
????IWDG_Enable();????????/*使能IWDG*/
}
/**
?*?喂獨立看門狗
?*/
void?IWDG_Feed(void)
{
????IWDG_ReloadCounter();????/*reload*/
}
/**
?*main函數
?*/
void?main(void)
{
??NVIC_Configuration();//優先級配置
??IWDG_Init(4,625);//初始化獨立看門狗,分頻數為64,重裝載值為625,溢出時間計算為:64*625/40=1000ms=1s
?while(1)
??{
????delay_ms(500);//0.5秒喂一次狗
??????IWDG_Feed();//喂狗
??}????????
}
對于溢出時間的計算大家可以按照下面的公式計算:Tout=((4×2^prer) ×rlr) /40 (M3)
獨立看門狗所用到的庫函數:
void?WWDG_DeInit(void); void?WWDG_SetPrescaler(uint32_t?WWDG_Prescaler); void?WWDG_SetWindowValue(uint8_t?WindowValue); void?WWDG_EnableIT(void); void?WWDG_SetCounter(uint8_t?Counter); void?WWDG_Enable(uint8_t?Counter); FlagStatus?WWDG_GetFlagStatus(void); void?WWDG_ClearFlag(void);
三、窗口看門狗
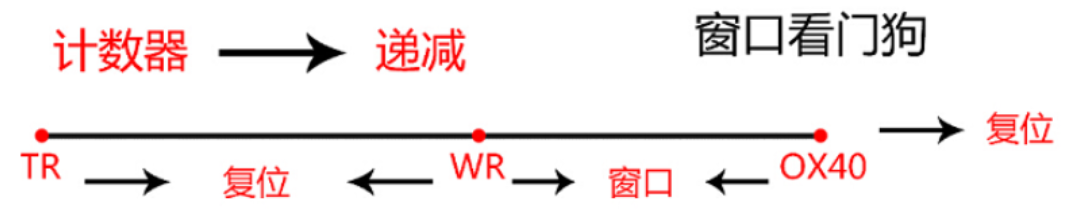
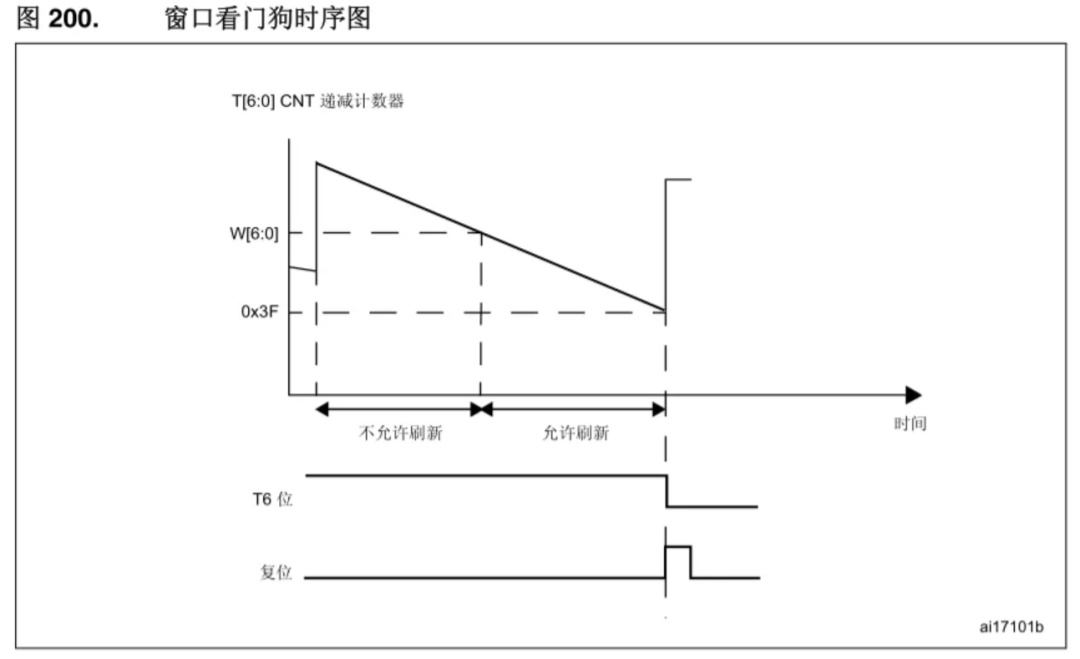
窗口看門狗(WWDG)通常被用來監測由外部干擾或不可預見的邏輯條件造成的應用程序背離正常的運行序列而產生的軟件故障。除非遞減計數器的值在 T6 位 (WWDG->CR 的第六位)變成 0 前被刷新,看門狗電路在達到預置的時間周期時,會產生一個 MCU 復位。
在遞減計數器達到窗口配置寄存器(WWDG->CFR)數值之前,如果 7 位的遞減計數器數值(在控制寄存器中)被刷新,那么也將產生一個 MCU 復位。這表明遞減計數器需要在一個有限的時間窗口中被刷新。
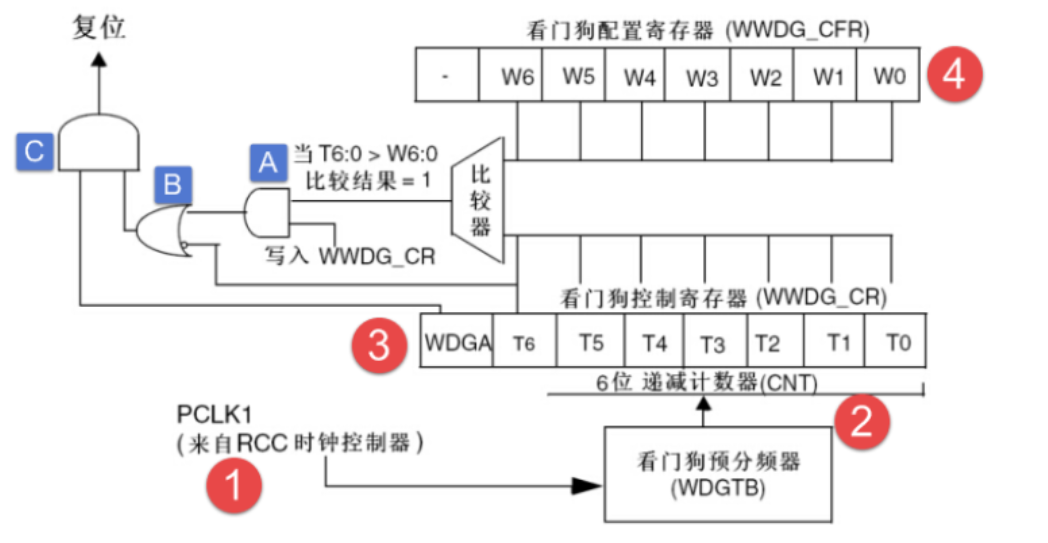
但是在使用窗口看門狗的時候需要注意寫入WWDG_CR 寄存器時,始終將 1 寫入 T6 位,以避免生成立即復位。
下面來看一下窗口看門狗的配置步驟以及配置代碼;
使能 WWDG 時鐘
設置窗口值和分頻數
開啟 WWDG 中斷并分組
設置計數器初始值并使能看門狗
窗體看門狗需要用到的庫函數;
void?RCC_APB1PeriphClockCmd(RCC_APB1Periph_WWDG,?ENABLE);?//?WWDG?時鐘使能 void?WWDG_SetWindowValue(uint8_t?WindowValue);//設置窗口值的函數 void?WWDG_SetPrescaler(uint32_t?WWDG_Prescaler);//設置分頻數的函數 void?WWDG_EnableIT();?//開啟窗口看門狗中斷 void?WWDG_Enable(uint8_t?Counter);//設置計數器初始值并使能看門狗
注意:在編寫中斷服務函數時喂狗一定要快,因為窗口看門狗的時效性比較強
窗口看門狗的代碼如下:
.c
#ifndef?__WDG_H #define?__WDG_H #include?"sys.h" //獨立看門狗 void?IWDG_Init(u8?prer,u16?rlr); void?IWDG_Feed(void); //窗口看門狗 void?WWDG_Init(u8?tr,u8?wr,u32?fprer);//初始化WWDG void?WWDG_Set_Counter(u8?cnt);???????//設置WWDG的計數器 void?WWDG_NVIC_Init(void); #endif
.h
#include?"wdg.h" #include?"led.h" //窗口看門狗 //保存WWDG計數器的設置值,默認為最大.? u8?WWDG_CNT=0x7f;? //初始化窗口看門狗?? //tr???:T[6:0],計數器值? //wr???:W[6:0],窗口值? //fprer:分頻系數(WDGTB),僅最低2位有效? //Fwwdg=PCLK1/(4096*2^fprer).? void?WWDG_Init(u8?tr,u8?wr,u32?fprer) {? ?RCC_APB1PeriphClockCmd(RCC_APB1Periph_WWDG,?ENABLE);??//???WWDG時鐘使能 ?WWDG_CNT=tr&WWDG_CNT;???//初始化WWDG_CNT.??? ?WWDG_SetPrescaler(fprer);設置IWDG預分頻值 ?WWDG_SetWindowValue(wr);//設置窗口值 ?WWDG_Enable(WWDG_CNT);??//使能看門狗?,?設置?counter?.?????????????????? ?WWDG_ClearFlag();//清除提前喚醒中斷標志位? ?WWDG_NVIC_Init();//初始化窗口看門狗?NVIC ?WWDG_EnableIT();?//開啟窗口看門狗中斷 }? //重設置WWDG計數器的值 void?WWDG_Set_Counter(u8?cnt) { ????WWDG_Enable(cnt);//使能看門狗?,?設置?counter?.?? } //窗口看門狗中斷服務程序 void?WWDG_NVIC_Init() { ?NVIC_InitTypeDef?NVIC_InitStructure; ?NVIC_InitStructure.NVIC_IRQChannel?=?WWDG_IRQn;????//WWDG中斷 ?NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority?=?2;???//搶占2,子優先級3,組2? ?NVIC_InitStructure.NVIC_IRQChannelSubPriority?=?3;??//搶占2,子優先級3,組2? ??NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;? ?NVIC_Init(&NVIC_InitStructure);//NVIC初始化 } void?WWDG_IRQHandler(void) { ?WWDG_SetCounter(WWDG_CNT);???//當禁掉此句后,窗口看門狗將產生復位 ?WWDG_ClearFlag();???//清除提前喚醒中斷標志位 ?LED1=!LED1;???//LED狀態翻轉 }
main.c
#include?"led.h"
#include?"delay.h"
#include?"key.h"
#include?"sys.h"
#include?"usart.h"
#include?"wdg.h"
?
int?main(void)
{??
?delay_init();???????//延時函數初始化???
?NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//設置中斷優先級分組為組2:2位搶占優先級,2位響應優先級
?uart_init(115200);??//串口初始化為115200
??LED_Init();
?KEY_Init();??????????//按鍵初始化??
?LED0=0;
?delay_ms(500);???
?WWDG_Init(0X7F,0X5F,WWDG_Prescaler_8);//計數器值為7f,窗口寄存器為5f,分頻數為8????
??while(1)
?{
??LED0=1;?????????
?}???
}
在main函數里通過 LED0 來指示 STM32 是否被復位了,如果被復位了就會點亮 500ms。LED0 用來指示中斷喂狗,每次中斷喂狗翻轉一次。
四、結語
到這里今天的講解內容就結束了,不知道你對于看門狗以及看門狗的使用有沒有理解,如果覺得有不理解的地方歡迎大家在下方評論區留言一起討論!
編輯:黃飛
?







 工商網監
工商網監
評論